
Os detectores de objetos podem identificar quais de um conjunto conhecido de objetos podem estar presentes e fornecer informações sobre suas posições dentro de uma determinada imagem ou fluxo de vídeo. Um detector de objetos é treinado para detectar a presença e localização de várias classes de objetos. Por exemplo, um modelo pode ser treinado com imagens que contêm vários pedaços de fruta, juntamente com um rótulo que especifica a classe de fruta que eles representam (por exemplo, uma maçã, uma banana ou um morango) e dados especificando onde cada objeto aparece em a imagem. Consulte a introdução da detecção de objetos para obter mais informações sobre detectores de objetos.
Use a API ObjectDetector da Biblioteca de Tarefas para implantar seus detectores de objetos personalizados ou pré-treinados em seus aplicativos móveis.
Principais recursos da API ObjectDetector
Processamento de imagem de entrada, incluindo rotação, redimensionamento e conversão de espaço de cores.
Local do mapa de rótulos.
Limite de pontuação para filtrar resultados.
Resultados de detecção top-k.
Rotular lista de permissões e lista de negações.
Modelos de detector de objetos compatíveis
Os modelos a seguir são compatíveis com a API ObjectDetector .
Os modelos de detecção de objetos pré-treinados no TensorFlow Hub .
Modelos criados pelo AutoML Vision Edge Object Detection .
Modelos criados pelo TensorFlow Lite Model Maker para detector de objetos .
Modelos personalizados que atendem aos requisitos de compatibilidade do modelo .
Executar inferência em Java
Consulte o aplicativo de referência Object Detection para obter um exemplo de como usar ObjectDetector em um aplicativo Android.
Etapa 1: importar a dependência do Gradle e outras configurações
Copie o arquivo de modelo .tflite para o diretório assets do módulo Android onde o modelo será executado. Especifique que o arquivo não deve ser compactado e adicione a biblioteca do TensorFlow Lite ao arquivo build.gradle do módulo:
android {
// Other settings
// Specify tflite file should not be compressed for the app apk
aaptOptions {
noCompress "tflite"
}
}
dependencies {
// Other dependencies
// Import the Task Vision Library dependency (NNAPI is included)
implementation 'org.tensorflow:tensorflow-lite-task-vision'
// Import the GPU delegate plugin Library for GPU inference
implementation 'org.tensorflow:tensorflow-lite-gpu-delegate-plugin'
}
Etapa 2: usando o modelo
// Initialization
ObjectDetectorOptions options =
ObjectDetectorOptions.builder()
.setBaseOptions(BaseOptions.builder().useGpu().build())
.setMaxResults(1)
.build();
ObjectDetector objectDetector =
ObjectDetector.createFromFileAndOptions(
context, modelFile, options);
// Run inference
List<Detection> results = objectDetector.detect(image);
Consulte o código-fonte e o javadoc para obter mais opções para configurar ObjectDetector .
Executar inferência no iOS
Etapa 1: instalar as dependências
A Biblioteca de Tarefas oferece suporte à instalação usando CocoaPods. Certifique-se de que o CocoaPods esteja instalado em seu sistema. Consulte o guia de instalação do CocoaPods para obter instruções.
Consulte o guia CocoaPods para obter detalhes sobre como adicionar pods a um projeto Xcode.
Adicione o pod TensorFlowLiteTaskVision no Podfile.
target 'MyAppWithTaskAPI' do
use_frameworks!
pod 'TensorFlowLiteTaskVision'
end
Certifique-se de que o modelo .tflite que você usará para inferência esteja presente em seu pacote de aplicativos.
Etapa 2: usando o modelo
Rápido
// Imports
import TensorFlowLiteTaskVision
// Initialization
guard let modelPath = Bundle.main.path(forResource: "ssd_mobilenet_v1",
ofType: "tflite") else { return }
let options = ObjectDetectorOptions(modelPath: modelPath)
// Configure any additional options:
// options.classificationOptions.maxResults = 3
let detector = try ObjectDetector.detector(options: options)
// Convert the input image to MLImage.
// There are other sources for MLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
guard let image = UIImage (named: "cats_and_dogs.jpg"), let mlImage = MLImage(image: image) else { return }
// Run inference
let detectionResult = try detector.detect(mlImage: mlImage)
Objetivo C
// Imports
#import <TensorFlowLiteTaskVision/TensorFlowLiteTaskVision.h>
// Initialization
NSString *modelPath = [[NSBundle mainBundle] pathForResource:@"ssd_mobilenet_v1" ofType:@"tflite"];
TFLObjectDetectorOptions *options = [[TFLObjectDetectorOptions alloc] initWithModelPath:modelPath];
// Configure any additional options:
// options.classificationOptions.maxResults = 3;
TFLObjectDetector *detector = [TFLObjectDetector objectDetectorWithOptions:options
error:nil];
// Convert the input image to MLImage.
UIImage *image = [UIImage imageNamed:@"dogs.jpg"];
// There are other sources for GMLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
GMLImage *gmlImage = [[GMLImage alloc] initWithImage:image];
// Run inference
TFLDetectionResult *detectionResult = [detector detectWithGMLImage:gmlImage error:nil];
Consulte o código-fonte para obter mais opções para configurar o TFLObjectDetector .
Executar inferência em Python
Etapa 1: Instale o pacote pip
pip install tflite-support
Etapa 2: usando o modelo
# Imports
from tflite_support.task import vision
from tflite_support.task import core
from tflite_support.task import processor
# Initialization
base_options = core.BaseOptions(file_name=model_path)
detection_options = processor.DetectionOptions(max_results=2)
options = vision.ObjectDetectorOptions(base_options=base_options, detection_options=detection_options)
detector = vision.ObjectDetector.create_from_options(options)
# Alternatively, you can create an object detector in the following manner:
# detector = vision.ObjectDetector.create_from_file(model_path)
# Run inference
image = vision.TensorImage.create_from_file(image_path)
detection_result = detector.detect(image)
Consulte o código-fonte para obter mais opções para configurar ObjectDetector .
Executar inferência em C++
// Initialization
ObjectDetectorOptions options;
options.mutable_base_options()->mutable_model_file()->set_file_name(model_path);
std::unique_ptr<ObjectDetector> object_detector = ObjectDetector::CreateFromOptions(options).value();
// Create input frame_buffer from your inputs, `image_data` and `image_dimension`.
// See more information here: tensorflow_lite_support/cc/task/vision/utils/frame_buffer_common_utils.h
std::unique_ptr<FrameBuffer> frame_buffer = CreateFromRgbRawBuffer(
image_data, image_dimension);
// Run inference
const DetectionResult result = object_detector->Detect(*frame_buffer).value();
Consulte o código-fonte para obter mais opções para configurar ObjectDetector .
Resultados de exemplo
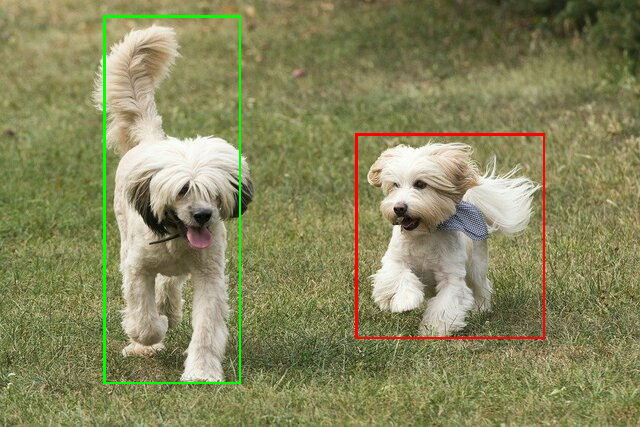
Aqui está um exemplo dos resultados de detecção do ssd mobilenet v1 do TensorFlow Hub.

Results:
Detection #0 (red):
Box: (x: 355, y: 133, w: 190, h: 206)
Top-1 class:
index : 17
score : 0.73828
class name : dog
Detection #1 (green):
Box: (x: 103, y: 15, w: 138, h: 369)
Top-1 class:
index : 17
score : 0.73047
class name : dog
Renderize as caixas delimitadoras na imagem de entrada:
Experimente a ferramenta de demonstração CLI simples para ObjectDetector com seu próprio modelo e dados de teste.
Requisitos de compatibilidade do modelo
A API ObjectDetector espera um modelo TFLite com metadados de modelo TFLite obrigatórios. Veja exemplos de criação de metadados para detectores de objetos usando a API TensorFlow Lite Metadata Writer .
Os modelos de detector de objetos compatíveis devem atender aos seguintes requisitos:
Tensor de imagem de entrada: (kTfLiteUInt8/kTfLiteFloat32)
- entrada de imagem de tamanho
[batch x height x width x channels]. - a inferência de lote não é suportada (o
batchdeve ser 1). - apenas entradas RGB são suportadas (os
channelsdevem ser 3). - se o tipo for kTfLiteFloat32, as NormalizationOptions devem ser anexadas aos metadados para normalização de entrada.
- entrada de imagem de tamanho
Os tensores de saída devem ser as 4 saídas de um op
DetectionPostProcess, ou seja:- Tensor de locais (kTfLiteFloat32)
- tensor de tamanho
[1 x num_results x 4], o array interno representando caixas delimitadoras na forma [top, left, right, bottom]. - BoundingBoxProperties devem ser anexados aos metadados e devem especificar
type=BOUNDARIESe `coordinate_type=RATIO.
- tensor de tamanho
Tensor de classes (kTfLiteFloat32)
- tensor de tamanho
[1 x num_results], cada valor representando o índice inteiro de uma classe. - mapa(s) de rótulos opcionais (mas recomendados) podem ser anexados como AssociatedFile-s com o tipo TENSOR_VALUE_LABELS, contendo um rótulo por linha. Veja o arquivo de etiqueta de exemplo . O primeiro AssociatedFile (se houver) é usado para preencher o campo
class_namedos resultados. O campodisplay_nameé preenchido a partir do AssociatedFile (se houver) cuja localidade corresponde ao campodisplay_names_localedoObjectDetectorOptionsusado no momento da criação ("en" por padrão, ou seja, inglês). Se nenhum deles estiver disponível, apenas o campo deindexdos resultados será preenchido.
- tensor de tamanho
Tensor de pontuação (kTfLiteFloat32)
- tensor de tamanho
[1 x num_results], cada valor representando a pontuação do objeto detectado.
- tensor de tamanho
Número do tensor de detecção (kTfLiteFloat32)
- integer num_results como um tensor de tamanho
[1].
- integer num_results como um tensor de tamanho
- Tensor de locais (kTfLiteFloat32)
Os detectores de objetos podem identificar quais de um conjunto conhecido de objetos podem estar presentes e fornecer informações sobre suas posições dentro de uma determinada imagem ou fluxo de vídeo. Um detector de objetos é treinado para detectar a presença e localização de várias classes de objetos. Por exemplo, um modelo pode ser treinado com imagens que contêm vários pedaços de fruta, juntamente com um rótulo que especifica a classe de fruta que eles representam (por exemplo, uma maçã, uma banana ou um morango) e dados especificando onde cada objeto aparece em a imagem. Consulte a introdução da detecção de objetos para obter mais informações sobre detectores de objetos.
Use a API ObjectDetector da Biblioteca de Tarefas para implantar seus detectores de objetos personalizados ou pré-treinados em seus aplicativos móveis.
Principais recursos da API ObjectDetector
Processamento de imagem de entrada, incluindo rotação, redimensionamento e conversão de espaço de cores.
Local do mapa de rótulos.
Limite de pontuação para filtrar resultados.
Resultados de detecção top-k.
Rotular lista de permissões e lista de negações.
Modelos de detector de objetos compatíveis
Os modelos a seguir são compatíveis com a API ObjectDetector .
Os modelos de detecção de objetos pré-treinados no TensorFlow Hub .
Modelos criados pelo AutoML Vision Edge Object Detection .
Modelos criados pelo TensorFlow Lite Model Maker para detector de objetos .
Modelos personalizados que atendem aos requisitos de compatibilidade do modelo .
Executar inferência em Java
Consulte o aplicativo de referência Object Detection para obter um exemplo de como usar ObjectDetector em um aplicativo Android.
Etapa 1: importar a dependência do Gradle e outras configurações
Copie o arquivo de modelo .tflite para o diretório assets do módulo Android onde o modelo será executado. Especifique que o arquivo não deve ser compactado e adicione a biblioteca do TensorFlow Lite ao arquivo build.gradle do módulo:
android {
// Other settings
// Specify tflite file should not be compressed for the app apk
aaptOptions {
noCompress "tflite"
}
}
dependencies {
// Other dependencies
// Import the Task Vision Library dependency (NNAPI is included)
implementation 'org.tensorflow:tensorflow-lite-task-vision'
// Import the GPU delegate plugin Library for GPU inference
implementation 'org.tensorflow:tensorflow-lite-gpu-delegate-plugin'
}
Etapa 2: usando o modelo
// Initialization
ObjectDetectorOptions options =
ObjectDetectorOptions.builder()
.setBaseOptions(BaseOptions.builder().useGpu().build())
.setMaxResults(1)
.build();
ObjectDetector objectDetector =
ObjectDetector.createFromFileAndOptions(
context, modelFile, options);
// Run inference
List<Detection> results = objectDetector.detect(image);
Consulte o código-fonte e o javadoc para obter mais opções para configurar ObjectDetector .
Executar inferência no iOS
Etapa 1: instalar as dependências
A Biblioteca de Tarefas oferece suporte à instalação usando CocoaPods. Certifique-se de que o CocoaPods esteja instalado em seu sistema. Consulte o guia de instalação do CocoaPods para obter instruções.
Consulte o guia CocoaPods para obter detalhes sobre como adicionar pods a um projeto Xcode.
Adicione o pod TensorFlowLiteTaskVision no Podfile.
target 'MyAppWithTaskAPI' do
use_frameworks!
pod 'TensorFlowLiteTaskVision'
end
Certifique-se de que o modelo .tflite que você usará para inferência esteja presente em seu pacote de aplicativos.
Etapa 2: usando o modelo
Rápido
// Imports
import TensorFlowLiteTaskVision
// Initialization
guard let modelPath = Bundle.main.path(forResource: "ssd_mobilenet_v1",
ofType: "tflite") else { return }
let options = ObjectDetectorOptions(modelPath: modelPath)
// Configure any additional options:
// options.classificationOptions.maxResults = 3
let detector = try ObjectDetector.detector(options: options)
// Convert the input image to MLImage.
// There are other sources for MLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
guard let image = UIImage (named: "cats_and_dogs.jpg"), let mlImage = MLImage(image: image) else { return }
// Run inference
let detectionResult = try detector.detect(mlImage: mlImage)
Objetivo C
// Imports
#import <TensorFlowLiteTaskVision/TensorFlowLiteTaskVision.h>
// Initialization
NSString *modelPath = [[NSBundle mainBundle] pathForResource:@"ssd_mobilenet_v1" ofType:@"tflite"];
TFLObjectDetectorOptions *options = [[TFLObjectDetectorOptions alloc] initWithModelPath:modelPath];
// Configure any additional options:
// options.classificationOptions.maxResults = 3;
TFLObjectDetector *detector = [TFLObjectDetector objectDetectorWithOptions:options
error:nil];
// Convert the input image to MLImage.
UIImage *image = [UIImage imageNamed:@"dogs.jpg"];
// There are other sources for GMLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
GMLImage *gmlImage = [[GMLImage alloc] initWithImage:image];
// Run inference
TFLDetectionResult *detectionResult = [detector detectWithGMLImage:gmlImage error:nil];
Consulte o código-fonte para obter mais opções para configurar o TFLObjectDetector .
Executar inferência em Python
Etapa 1: Instale o pacote pip
pip install tflite-support
Etapa 2: usando o modelo
# Imports
from tflite_support.task import vision
from tflite_support.task import core
from tflite_support.task import processor
# Initialization
base_options = core.BaseOptions(file_name=model_path)
detection_options = processor.DetectionOptions(max_results=2)
options = vision.ObjectDetectorOptions(base_options=base_options, detection_options=detection_options)
detector = vision.ObjectDetector.create_from_options(options)
# Alternatively, you can create an object detector in the following manner:
# detector = vision.ObjectDetector.create_from_file(model_path)
# Run inference
image = vision.TensorImage.create_from_file(image_path)
detection_result = detector.detect(image)
Consulte o código-fonte para obter mais opções para configurar ObjectDetector .
Executar inferência em C++
// Initialization
ObjectDetectorOptions options;
options.mutable_base_options()->mutable_model_file()->set_file_name(model_path);
std::unique_ptr<ObjectDetector> object_detector = ObjectDetector::CreateFromOptions(options).value();
// Create input frame_buffer from your inputs, `image_data` and `image_dimension`.
// See more information here: tensorflow_lite_support/cc/task/vision/utils/frame_buffer_common_utils.h
std::unique_ptr<FrameBuffer> frame_buffer = CreateFromRgbRawBuffer(
image_data, image_dimension);
// Run inference
const DetectionResult result = object_detector->Detect(*frame_buffer).value();
Consulte o código-fonte para obter mais opções para configurar ObjectDetector .
Resultados de exemplo
Aqui está um exemplo dos resultados de detecção do ssd mobilenet v1 do TensorFlow Hub.
Results:
Detection #0 (red):
Box: (x: 355, y: 133, w: 190, h: 206)
Top-1 class:
index : 17
score : 0.73828
class name : dog
Detection #1 (green):
Box: (x: 103, y: 15, w: 138, h: 369)
Top-1 class:
index : 17
score : 0.73047
class name : dog
Renderize as caixas delimitadoras na imagem de entrada:
Experimente a ferramenta de demonstração CLI simples para ObjectDetector com seu próprio modelo e dados de teste.
Requisitos de compatibilidade do modelo
A API ObjectDetector espera um modelo TFLite com metadados de modelo TFLite obrigatórios. Veja exemplos de criação de metadados para detectores de objetos usando a API TensorFlow Lite Metadata Writer .
Os modelos de detector de objetos compatíveis devem atender aos seguintes requisitos:
Tensor de imagem de entrada: (kTfLiteUInt8/kTfLiteFloat32)
- entrada de imagem de tamanho
[batch x height x width x channels]. - a inferência de lote não é suportada (o
batchdeve ser 1). - apenas entradas RGB são suportadas (os
channelsdevem ser 3). - se o tipo for kTfLiteFloat32, as NormalizationOptions devem ser anexadas aos metadados para normalização de entrada.
- entrada de imagem de tamanho
Os tensores de saída devem ser as 4 saídas de um op
DetectionPostProcess, ou seja:- Tensor de locais (kTfLiteFloat32)
- tensor de tamanho
[1 x num_results x 4], o array interno representando caixas delimitadoras na forma [top, left, right, bottom]. - BoundingBoxProperties devem ser anexados aos metadados e devem especificar
type=BOUNDARIESe `coordinate_type=RATIO.
- tensor de tamanho
Tensor de classes (kTfLiteFloat32)
- tensor de tamanho
[1 x num_results], cada valor representando o índice inteiro de uma classe. - mapa(s) de rótulos opcionais (mas recomendados) podem ser anexados como AssociatedFile-s com o tipo TENSOR_VALUE_LABELS, contendo um rótulo por linha. Veja o arquivo de etiqueta de exemplo . O primeiro AssociatedFile (se houver) é usado para preencher o campo
class_namedos resultados. O campodisplay_nameé preenchido a partir do AssociatedFile (se houver) cuja localidade corresponde ao campodisplay_names_localedoObjectDetectorOptionsusado no momento da criação ("en" por padrão, ou seja, inglês). Se nenhum deles estiver disponível, apenas o campo deindexdos resultados será preenchido.
- tensor de tamanho
Tensor de pontuação (kTfLiteFloat32)
- tensor de tamanho
[1 x num_results], cada valor representando a pontuação do objeto detectado.
- tensor de tamanho
Número do tensor de detecção (kTfLiteFloat32)
- integer num_results como um tensor de tamanho
[1].
- integer num_results como um tensor de tamanho
- Tensor de locais (kTfLiteFloat32)