
Overview
Meshes and points cloud are important and powerful types of data to represent 3D shapes and widely studied in the field of computer vision and computer graphics. 3D data is becoming more ubiquitous and researchers challenge new problems like 3D geometry reconstruction from 2D data, 3D point cloud semantic segmentation, aligning or morphing 3D objects and so on. Therefore, visualizing results, especially during the training stage, is critical to better understand how the model performs.
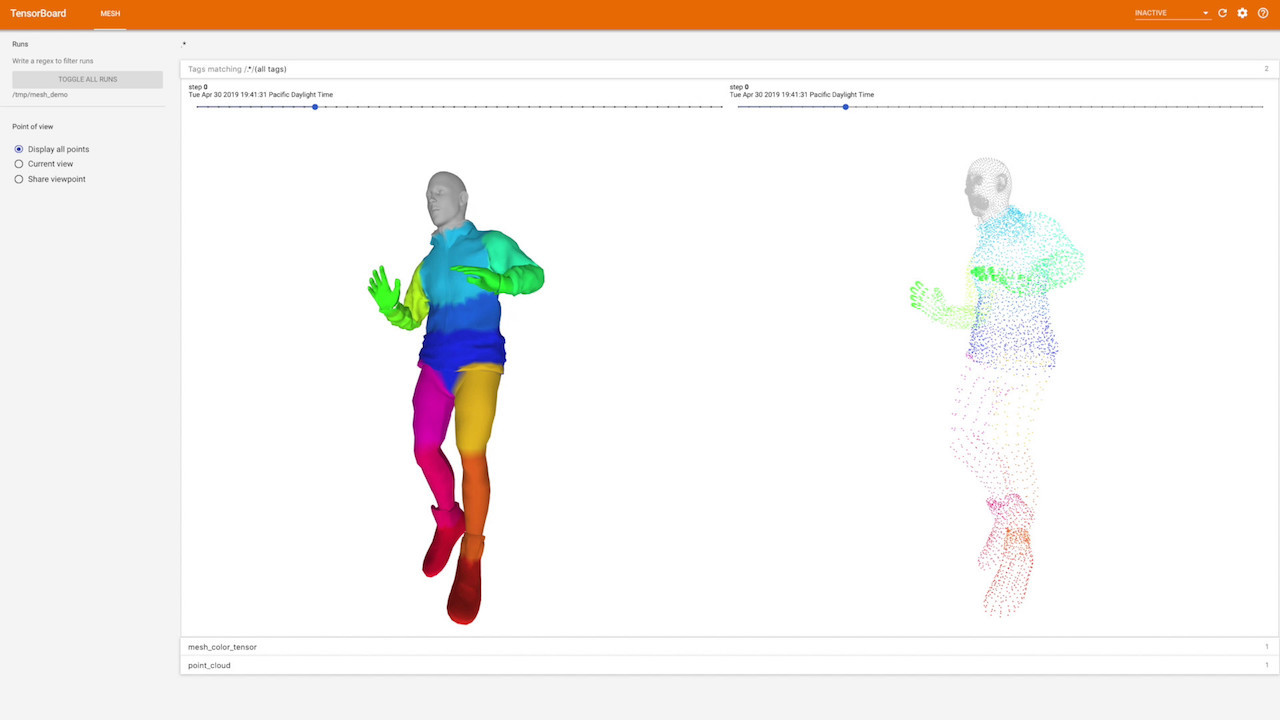 {width="100%"}
{width="100%"}
This plugin intends to display 3D point clouds or meshes (triangulated point clouds) in TensorBoard. In addition, it allows the user to interact with the rendered objects.
Summary API
Either a mesh or a point cloud can be represented by a set of tensors. For example, one can see a point cloud as a set of 3D coordinates of the points and some colors associated with each point.
from tensorboard.plugins.mesh import summary as mesh_summary
...
point_cloud = tf.constant([[[0.19, 0.78, 0.02], ...]], shape=[1, 1064, 3])
point_colors = tf.constant([[[128, 104, 227], ...]], shape=[1, 1064, 3])
summary = mesh_summary.op('point_cloud', vertices=point_cloud, colors=point_colors)
NOTE colors tensor is optional in this case but can be useful to show
different semantics of the points.
The plugin currently supports only triangular meshes which are different from point clouds above only by the presence of faces - set of vertices representing the triangle on the mesh.
mesh = tf.constant([[[0.19, 0.78, 0.02], ...]], shape=[1, 1064, 3])
colors = tf.constant([[[128, 104, 227], ...]], shape=[1, 1064, 3])
faces = tf.constant([[[13, 78, 54], ...]], shape=[1, 752, 3])
summary = mesh_summary.op('mesh', vertices=mesh, colors=colors, faces=faces)
Only the colors tensor is optional for mesh summaries.
Scene configuration
The way of how the objects will be displayed also depends on the scene
configuration, i.e. intensity and color of light sources, objects' material,
camera models and so on. All of that can be configured via an additional
parameter config_dict. This dictionary may contain three high-level keys:
camera, lights and material. Each key must also be a dictionary with
mandatory key cls, representing valid THREE.js class
name.
camera_config = {'cls': 'PerspectiveCamera'}
summary = mesh_summary.op(
"mesh",
vertices=mesh,
colors=colors,
faces=faces,
config_dict={"camera": camera_config},
)
camera_config from the snippet above can be expanded according to the
THREE.js documentation.
All keys from camera_config will be passed to a class with name
camera_config.cls. For example (based on the
PerspectiveCamera documentation):
camera_config = {
'cls': 'PerspectiveCamera',
'fov': 75,
'aspect': 0.9,
}
...
Mind that scene configuration is not a trainable variable (i.e. static) and should be provided only during the creation of summaries.
How to install
Currently the plugin is part of TensorBoard nightly build, therefore you have to install it before using the plugin.
Colab
pip install -q -U tb-nightlyThen load Tensorboard extension and run it, similar to how you would do it in the Terminal:
%load_ext tensorboard
%tensorboard --logdir=/path/to/logs
Please consult the example Colab notebook for more details.
Terminal
If you want to run TensorBoard nightly build locally, first you need to install it:
pip install tf-nightly
Then just run it:
tensorboard --logdir path/to/logs