
概述
网格和点云是表示 3D 形状的重要而强大的数据类型,在计算机视觉和计算机图形学领域得到了广泛的研究。3D 数据变得越来越普遍,研究人员向新问题提出了挑战,例如使用 2D 数据重建 3D 几何形状、3D 点云语义分割、3D 物体的对齐或变形等。因此,可视化结果(尤其是在训练阶段)对于更好地了解模型表现至关重要。
 {width="100%"}
{width="100%"}
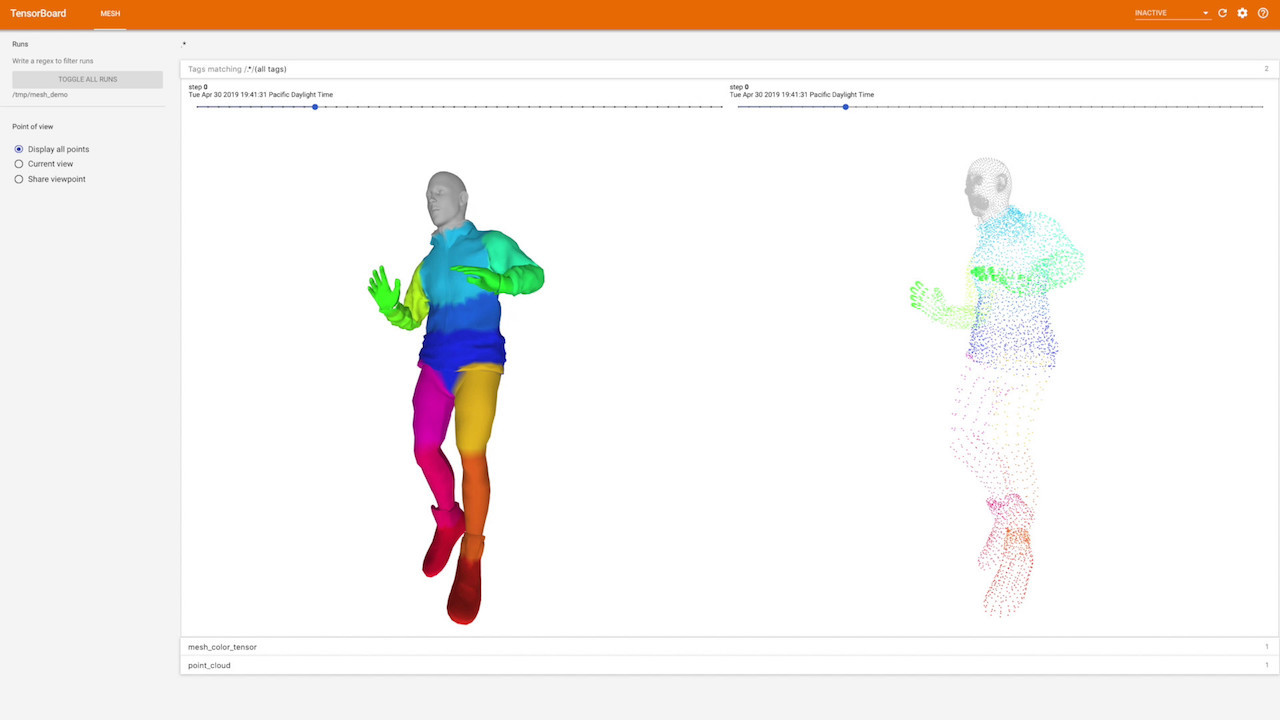
此插件的作用是在 TensorBoard 中显示 3D 点云或网格(三角点云)。另外,它还允许用户与渲染的物体进行交互。
Summary API
网格或点云都可由一组张量表示。例如,人们可将点云视为点的一组 3D 坐标以及与每个点关联的一些颜色。
from tensorboard.plugins.mesh import summary as mesh_summary
...
point_cloud = tf.constant([[[0.19, 0.78, 0.02], ...]], shape=[1, 1064, 3])
point_colors = tf.constant([[[128, 104, 227], ...]], shape=[1, 1064, 3])
summary = mesh_summary.op('point_cloud', vertices=point_cloud, colors=point_colors)
请注意,colors 张量在这种情况下是可选的,但对于显示点的不同语义可能很有用。
此插件目前仅支持三角网格,三角网格仅因面的存在而与上面的点云不同,面是表示网格上三角形的一组顶点。
mesh = tf.constant([[[0.19, 0.78, 0.02], ...]], shape=[1, 1064, 3])
colors = tf.constant([[[128, 104, 227], ...]], shape=[1, 1064, 3])
faces = tf.constant([[[13, 78, 54], ...]], shape=[1, 752, 3])
summary = mesh_summary.op('mesh', vertices=mesh, colors=colors, faces=faces)
对于网格摘要,仅 colors 张量是可选的。
场景配置
如何显示物体的方式还取决于场景配置,即光源的强度和颜色、物体的材质、相机模型等。所有这些均可通过附加参数 config_dict 进行配置。此字典可能包含三个高级键:camera、lights 和 material。每个键也必须是一个字典,其中包含必需的键 cls,表示有效的 THREE.js 类名称。
camera_config = {'cls': 'PerspectiveCamera'}
summary = mesh_summary.op(
"mesh",
vertices=mesh,
colors=colors,
faces=faces,
config_dict={"camera": camera_config},
)
可根据 THREE.js 文档扩展上述代码段中的 camera_config。camera_config 中的所有键都将传递给名称为 camera_config.cls 的类。例如(基于 PerspectiveCamera 文档):
camera_config = {
'cls': 'PerspectiveCamera',
'fov': 75,
'aspect': 0.9,
}
...
请注意,场景配置不是可训练的变量(即静态),应仅在创建摘要时提供。
如何安装
目前,此插件是 TensorBoard Nightly 版本的一部分,因此您必须先安装该插件,然后才能使用。
Colab
pip install -q -U tb-nightly随后加载 Tensorboard 扩展程序并运行它,类似于在终端中执行的操作:
%load_ext tensorboard
%tensorboard --logdir=/path/to/logs
有关更多详细信息,请参阅示例 Colab 笔记本。
终端
如果您想在本地运行 TensorBoard Nightly 版本,首先需要安装它:
pip install tf-nightly
随后即可运行:
tensorboard --logdir path/to/logs