
Copyright 2018 The TF-Agents Authors.
| |
 GitHub でソースを表示{ GitHub でソースを表示{ |
はじめに
この例は、DQN チュートリアルのように、Cartpole 環境で TF-Agents ライブラリを使用して REINFORCE(強化)エージェントをトレーニングする方法を示します。

ここでは、トレーニング、評価、データ収集に使用する強化学習(RL)パイプラインの全コンポーネントについて説明します。
セットアップ
以下の依存関係をインストールしていない場合は、実行します。
sudo apt-get install -y xvfb ffmpegpip install -q 'gym==0.10.11'pip install -q 'imageio==2.4.0'pip install -q PILLOWpip install -q 'pyglet==1.3.2'pip install -q pyvirtualdisplaypip install -q tf-agents
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import base64
import imageio
import IPython
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
import PIL.Image
import pyvirtualdisplay
import tensorflow as tf
from tf_agents.agents.reinforce import reinforce_agent
from tf_agents.drivers import dynamic_step_driver
from tf_agents.environments import suite_gym
from tf_agents.environments import tf_py_environment
from tf_agents.eval import metric_utils
from tf_agents.metrics import tf_metrics
from tf_agents.networks import actor_distribution_network
from tf_agents.replay_buffers import tf_uniform_replay_buffer
from tf_agents.trajectories import trajectory
from tf_agents.utils import common
tf.compat.v1.enable_v2_behavior()
# Set up a virtual display for rendering OpenAI gym environments.
display = pyvirtualdisplay.Display(visible=0, size=(1400, 900)).start()
ハイパーパラメータ
env_name = "CartPole-v0" # @param {type:"string"}
num_iterations = 250 # @param {type:"integer"}
collect_episodes_per_iteration = 2 # @param {type:"integer"}
replay_buffer_capacity = 2000 # @param {type:"integer"}
fc_layer_params = (100,)
learning_rate = 1e-3 # @param {type:"number"}
log_interval = 25 # @param {type:"integer"}
num_eval_episodes = 10 # @param {type:"integer"}
eval_interval = 50 # @param {type:"integer"}
環境
強化学習の環境は、解決しようとしているタスクまたは問題を表しています。標準環境は、suitesを使用して TF-Agent で簡単に作成できます。OpenAI Gym、Atari、DM Control などのソースから環境を読み込むには異なるsuitesを使用し、これには文字列の環境名が与えられます。
では、OpenAI Gym スイートから CartPole 環境を読み込みましょう。
env = suite_gym.load(env_name)
この環境をレンダリングして、どのように見えるかを確認できます。台車の上に回転軸を固定した棒を立て、その棒が倒れないように台車を左右に動かすことが目的です。
env.reset()
PIL.Image.fromarray(env.render())
time_step = environment.step(action)文は環境でactionを取ります。返されるTimeStepタプルには、環境の次の観測とその行動の報酬を含みます。環境のtime_step_spec()メソッドとaction_spec()メソッドは、 time_stepとactionの仕様(タイプ、形状、境界)をそれぞれ返します。
print('Observation Spec:')
print(env.time_step_spec().observation)
print('Action Spec:')
print(env.action_spec())
Observation Spec:
BoundedArraySpec(shape=(4,), dtype=dtype('float32'), name='observation', minimum=[-4.8000002e+00 -3.4028235e+38 -4.1887903e-01 -3.4028235e+38], maximum=[4.8000002e+00 3.4028235e+38 4.1887903e-01 3.4028235e+38])
Action Spec:
BoundedArraySpec(shape=(), dtype=dtype('int64'), name='action', minimum=0, maximum=1)
つまり、観測は、台車の位置と速度、軸の角度位置と速度から成る 4 つの浮動小数点数の配列であることが分かります。2 つの行動(左に動かす、または右に動かす)のみが可能なので、action_specはスカラーで、0 は「左に動かす」を意味し、1 は「右に移動する」を意味します。
time_step = env.reset()
print('Time step:')
print(time_step)
action = np.array(1, dtype=np.int32)
next_time_step = env.step(action)
print('Next time step:')
print(next_time_step)
Time step: TimeStep(step_type=array(0, dtype=int32), reward=array(0., dtype=float32), discount=array(1., dtype=float32), observation=array([0.0361198 , 0.02420668, 0.00372084, 0.04560814], dtype=float32)) Next time step: TimeStep(step_type=array(1, dtype=int32), reward=array(1., dtype=float32), discount=array(1., dtype=float32), observation=array([ 0.03660393, 0.21927509, 0.004633 , -0.2458985 ], dtype=float32))
通常は、トレーニング用と評価用の 2 つの環境を作成します。ほとんどの環境は純粋な python で記述されていますが、TFPyEnvironment ラッパーを使用すると容易に TensorFlow に変換できます。元の環境の API は numpy 配列を使用していますが、TFPyEnvironment はこれらを Tensors に変換したりその逆を可能にするので、より簡単に TensorFlow ポリシーやエージェントと相互作用できます。
train_py_env = suite_gym.load(env_name)
eval_py_env = suite_gym.load(env_name)
train_env = tf_py_environment.TFPyEnvironment(train_py_env)
eval_env = tf_py_environment.TFPyEnvironment(eval_py_env)
行動
強化学習問題の解決に使用するアルゴリズムは、Agentとして表現されます。TF-Agents は、DQN、DDPG、TD3、PPO、SAC などのさまざまなAgentsの標準実装を提供します。
REINFORCE エージェントを作成するためには、まずは任意の環境の観測から行動の予測ができるように学習可能なActor Networkが必要です。
Actor Networkは、観測と行動の仕様を使用して簡単に作成できます。ネットワーク内のレイヤーの指定が可能で、この例ではfc_layer_params引数が各隠れレイヤーのサイズを表現するintsのタプルを設定しています(上記ハイパーパラメータのセクションをご覧ください)。
actor_net = actor_distribution_network.ActorDistributionNetwork(
train_env.observation_spec(),
train_env.action_spec(),
fc_layer_params=fc_layer_params)
また、先ほど作成したネットワークをトレーニングするoptimizer と、ネットワークが更新された回数を追跡するtrain_step_counter変数も必要です。
optimizer = tf.compat.v1.train.AdamOptimizer(learning_rate=learning_rate)
train_step_counter = tf.compat.v2.Variable(0)
tf_agent = reinforce_agent.ReinforceAgent(
train_env.time_step_spec(),
train_env.action_spec(),
actor_network=actor_net,
optimizer=optimizer,
normalize_returns=True,
train_step_counter=train_step_counter)
tf_agent.initialize()
ポリシー
TF-Agent では、ポリシーとは強化学習のポリシーの標準的な概念を表し、任意のtime_stepは行動または行動の分布を生成します。主なメソッドはpolicy_step = policy.step(time_step)で、policy_stepは名前付きのタプルPolicyStep(action, state, info)です。policy_step.actionは環境に適用されるactionで、stateはステートフル(RNN)ポリシーの状態を表し、infoには行動のログ確率などの補助情報が含まれる場合があります。
エージェントには、2 つのポリシーが含まれています。これは評価/デプロイに使用するメインのポリシー(agent.policy)と、データ収集に使用するもう 1 つのポリシー(agent.collect_policy)です。
eval_policy = tf_agent.policy
collect_policy = tf_agent.collect_policy
メトリクスと評価
ポリシーの評価に使用される最も一般的なメトリックは、平均リターンです。リターンは、エピソードの環境でポリシーを実行中に取得した報酬の合計であり、通常は複数のエピソード間で平均化します。平均リターンのメトリックは以下のように計算できます。
def compute_avg_return(environment, policy, num_episodes=10):
total_return = 0.0
for _ in range(num_episodes):
time_step = environment.reset()
episode_return = 0.0
while not time_step.is_last():
action_step = policy.action(time_step)
time_step = environment.step(action_step.action)
episode_return += time_step.reward
total_return += episode_return
avg_return = total_return / num_episodes
return avg_return.numpy()[0]
# Please also see the metrics module for standard implementations of different
# metrics.
再生バッファ
環境から収集したデータを追跡するには、TFUniformReplayBuffer を使用します。この再生バッファは格納するテンソルを記述する仕様を使って構築され、tf_agent.collect_data_specを使用してエージェントから取得することができます。
replay_buffer = tf_uniform_replay_buffer.TFUniformReplayBuffer(
data_spec=tf_agent.collect_data_spec,
batch_size=train_env.batch_size,
max_length=replay_buffer_capacity)
ほとんどのエージェントの場合、collect_data_specはTrajectoryという名前付きタプルであり、観測、行動、報酬、その他が含まれています。
データ収集
REINFORCE はエピソード全体から学習するため、任意のデータ収集ポリシーを使用してエピソードを収集する関数を定義し、データ(観測、行動、報酬など)を再生バッファに軌跡として保存します。
def collect_episode(environment, policy, num_episodes):
episode_counter = 0
environment.reset()
while episode_counter < num_episodes:
time_step = environment.current_time_step()
action_step = policy.action(time_step)
next_time_step = environment.step(action_step.action)
traj = trajectory.from_transition(time_step, action_step, next_time_step)
# Add trajectory to the replay buffer
replay_buffer.add_batch(traj)
if traj.is_boundary():
episode_counter += 1
# This loop is so common in RL, that we provide standard implementations of
# these. For more details see the drivers module.
エージェントのトレーニング
トレーニングループには、環境からのデータ収集とエージェントのネットワークの最適化の両方を含みます。途中でエージェントのポリシーを時々評価して、状況を確認します。
以下の実行には 3 分ほどかかります。
try:
%%time
except:
pass
# (Optional) Optimize by wrapping some of the code in a graph using TF function.
tf_agent.train = common.function(tf_agent.train)
# Reset the train step
tf_agent.train_step_counter.assign(0)
# Evaluate the agent's policy once before training.
avg_return = compute_avg_return(eval_env, tf_agent.policy, num_eval_episodes)
returns = [avg_return]
for _ in range(num_iterations):
# Collect a few episodes using collect_policy and save to the replay buffer.
collect_episode(
train_env, tf_agent.collect_policy, collect_episodes_per_iteration)
# Use data from the buffer and update the agent's network.
experience = replay_buffer.gather_all()
train_loss = tf_agent.train(experience)
replay_buffer.clear()
step = tf_agent.train_step_counter.numpy()
if step % log_interval == 0:
print('step = {0}: loss = {1}'.format(step, train_loss.loss))
if step % eval_interval == 0:
avg_return = compute_avg_return(eval_env, tf_agent.policy, num_eval_episodes)
print('step = {0}: Average Return = {1}'.format(step, avg_return))
returns.append(avg_return)
WARNING:tensorflow:From <ipython-input-1-235ae48023f9>:24: ReplayBuffer.gather_all (from tf_agents.replay_buffers.replay_buffer) is deprecated and will be removed in a future version. Instructions for updating: Use `as_dataset(..., single_deterministic_pass=True)` instead. step = 25: loss = -0.5438544750213623 step = 50: loss = -0.23360729217529297 step = 50: Average Return = 104.5999984741211 step = 75: loss = 0.1887521743774414 step = 100: loss = -1.5150158405303955 step = 100: Average Return = 124.69999694824219 step = 125: loss = 0.11275577545166016 step = 150: loss = 0.3582572937011719 step = 150: Average Return = 200.0 step = 175: loss = 0.5104646682739258 step = 200: loss = -0.6397652626037598 step = 200: Average Return = 200.0 step = 225: loss = -7.164270401000977 step = 250: loss = -0.45493757724761963 step = 250: Average Return = 200.0
視覚化
プロット
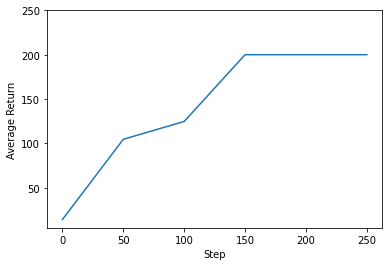
リターンとグローバルステップをプロットして、エージェントのパフォーマンスを確認できます。Cartpole-v0では、棒が立ったままのタイムステップごとに環境は +1 の報酬を提供します。最大ステップ数は 200 であるため、可能な最大リターン値も 200 です。
steps = range(0, num_iterations + 1, eval_interval)
plt.plot(steps, returns)
plt.ylabel('Average Return')
plt.xlabel('Step')
plt.ylim(top=250)
(4.8050004005432125, 250.0)
動画
各ステップで環境をレンダリングすると、エージェントのパフォーマンスを可視化できます。その前に、この Colab に動画を埋め込む関数を作成しましょう。
def embed_mp4(filename):
"""Embeds an mp4 file in the notebook."""
video = open(filename,'rb').read()
b64 = base64.b64encode(video)
tag = '''
<video width="640" height="480" controls>
<source src="data:video/mp4;base64,{0}" type="video/mp4">
Your browser does not support the video tag.
</video>'''.format(b64.decode())
return IPython.display.HTML(tag)
次のコードは、いくつかのエピソードに渡るエージェントのポリシーを可視化します。
num_episodes = 3
video_filename = 'imageio.mp4'
with imageio.get_writer(video_filename, fps=60) as video:
for _ in range(num_episodes):
time_step = eval_env.reset()
video.append_data(eval_py_env.render())
while not time_step.is_last():
action_step = tf_agent.policy.action(time_step)
time_step = eval_env.step(action_step.action)
video.append_data(eval_py_env.render())
embed_mp4(video_filename)
WARNING:root:IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (400, 600) to (400, 608) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to None (risking incompatibility). You may also see a FFMPEG warning concerning speedloss due to data not being aligned.