
Les détecteurs d'objets peuvent identifier lesquels d'un ensemble connu d'objets pourraient être présents et fournir des informations sur leurs positions dans l'image donnée ou dans un flux vidéo. Un détecteur d'objets est formé pour détecter la présence et l'emplacement de plusieurs classes d'objets. Par exemple, un modèle peut être entraîné avec des images contenant divers morceaux de fruits, ainsi qu'une étiquette spécifiant la classe de fruits qu'ils représentent (par exemple une pomme, une banane ou une fraise) et des données spécifiant où chaque objet apparaît dans l'image. Voir l' introduction de la détection d'objets pour plus d'informations sur les détecteurs d'objets.
Utilisez l'API Task Library ObjectDetector pour déployer vos détecteurs d'objets personnalisés ou pré-entraînés dans vos applications mobiles.
Principales fonctionnalités de l'API ObjectDetector
Traitement de l'image d'entrée, y compris la rotation, le redimensionnement et la conversion de l'espace colorimétrique.
Paramètres régionaux de la carte d'étiquettes.
Seuil de score pour filtrer les résultats.
Résultats de détection Top-k.
Étiquetez la liste d’autorisation et la liste de refus.
Modèles de détecteurs d'objets pris en charge
Les modèles suivants sont garantis compatibles avec l'API ObjectDetector .
Les modèles de détection d'objets pré-entraînés sur TensorFlow Hub .
Modèles créés par AutoML Vision Edge Object Detection .
Modèles créés par TensorFlow Lite Model Maker pour le détecteur d'objets .
Modèles personnalisés qui répondent aux exigences de compatibilité des modèles .
Exécuter l'inférence en Java
Consultez l’ application de référence de détection d’objets pour un exemple d’utilisation ObjectDetector dans une application Android.
Étape 1 : Importer la dépendance Gradle et d'autres paramètres
Copiez le fichier de modèle .tflite dans le répertoire des actifs du module Android où le modèle sera exécuté. Spécifiez que le fichier ne doit pas être compressé et ajoutez la bibliothèque TensorFlow Lite au fichier build.gradle du module :
android {
// Other settings
// Specify tflite file should not be compressed for the app apk
aaptOptions {
noCompress "tflite"
}
}
dependencies {
// Other dependencies
// Import the Task Vision Library dependency (NNAPI is included)
implementation 'org.tensorflow:tensorflow-lite-task-vision'
// Import the GPU delegate plugin Library for GPU inference
implementation 'org.tensorflow:tensorflow-lite-gpu-delegate-plugin'
}
Étape 2 : Utilisation du modèle
// Initialization
ObjectDetectorOptions options =
ObjectDetectorOptions.builder()
.setBaseOptions(BaseOptions.builder().useGpu().build())
.setMaxResults(1)
.build();
ObjectDetector objectDetector =
ObjectDetector.createFromFileAndOptions(
context, modelFile, options);
// Run inference
List<Detection> results = objectDetector.detect(image);
Voir le code source et javadoc pour plus d'options pour configurer ObjectDetector .
Exécuter l'inférence dans iOS
Étape 1 : Installer les dépendances
La bibliothèque de tâches prend en charge l'installation à l'aide de CocoaPods. Assurez-vous que CocoaPods est installé sur votre système. Veuillez consulter le guide d'installation de CocoaPods pour obtenir des instructions.
Veuillez consulter le guide CocoaPods pour plus de détails sur l'ajout de pods à un projet Xcode.
Ajoutez le pod TensorFlowLiteTaskVision dans le Podfile.
target 'MyAppWithTaskAPI' do
use_frameworks!
pod 'TensorFlowLiteTaskVision'
end
Assurez-vous que le modèle .tflite que vous utiliserez pour l'inférence est présent dans votre bundle d'applications.
Étape 2 : Utilisation du modèle
Rapide
// Imports
import TensorFlowLiteTaskVision
// Initialization
guard let modelPath = Bundle.main.path(forResource: "ssd_mobilenet_v1",
ofType: "tflite") else { return }
let options = ObjectDetectorOptions(modelPath: modelPath)
// Configure any additional options:
// options.classificationOptions.maxResults = 3
let detector = try ObjectDetector.detector(options: options)
// Convert the input image to MLImage.
// There are other sources for MLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
guard let image = UIImage (named: "cats_and_dogs.jpg"), let mlImage = MLImage(image: image) else { return }
// Run inference
let detectionResult = try detector.detect(mlImage: mlImage)
Objectif c
// Imports
#import <TensorFlowLiteTaskVision/TensorFlowLiteTaskVision.h>
// Initialization
NSString *modelPath = [[NSBundle mainBundle] pathForResource:@"ssd_mobilenet_v1" ofType:@"tflite"];
TFLObjectDetectorOptions *options = [[TFLObjectDetectorOptions alloc] initWithModelPath:modelPath];
// Configure any additional options:
// options.classificationOptions.maxResults = 3;
TFLObjectDetector *detector = [TFLObjectDetector objectDetectorWithOptions:options
error:nil];
// Convert the input image to MLImage.
UIImage *image = [UIImage imageNamed:@"dogs.jpg"];
// There are other sources for GMLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
GMLImage *gmlImage = [[GMLImage alloc] initWithImage:image];
// Run inference
TFLDetectionResult *detectionResult = [detector detectWithGMLImage:gmlImage error:nil];
Consultez le code source pour plus d'options pour configurer TFLObjectDetector .
Exécuter l'inférence en Python
Étape 1 : Installez le package pip
pip install tflite-support
Étape 2 : Utilisation du modèle
# Imports
from tflite_support.task import vision
from tflite_support.task import core
from tflite_support.task import processor
# Initialization
base_options = core.BaseOptions(file_name=model_path)
detection_options = processor.DetectionOptions(max_results=2)
options = vision.ObjectDetectorOptions(base_options=base_options, detection_options=detection_options)
detector = vision.ObjectDetector.create_from_options(options)
# Alternatively, you can create an object detector in the following manner:
# detector = vision.ObjectDetector.create_from_file(model_path)
# Run inference
image = vision.TensorImage.create_from_file(image_path)
detection_result = detector.detect(image)
Consultez le code source pour plus d'options pour configurer ObjectDetector .
Exécuter l'inférence en C++
// Initialization
ObjectDetectorOptions options;
options.mutable_base_options()->mutable_model_file()->set_file_name(model_path);
std::unique_ptr<ObjectDetector> object_detector = ObjectDetector::CreateFromOptions(options).value();
// Create input frame_buffer from your inputs, `image_data` and `image_dimension`.
// See more information here: tensorflow_lite_support/cc/task/vision/utils/frame_buffer_common_utils.h
std::unique_ptr<FrameBuffer> frame_buffer = CreateFromRgbRawBuffer(
image_data, image_dimension);
// Run inference
const DetectionResult result = object_detector->Detect(*frame_buffer).value();
Consultez le code source pour plus d'options pour configurer ObjectDetector .
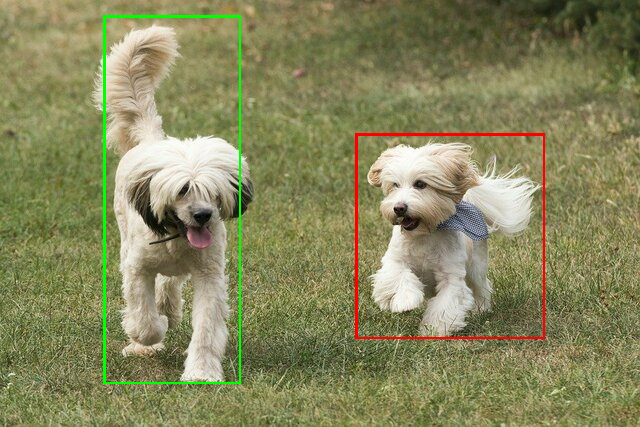
Exemples de résultats
Voici un exemple des résultats de détection de ssd mobilenet v1 de TensorFlow Hub.

Results:
Detection #0 (red):
Box: (x: 355, y: 133, w: 190, h: 206)
Top-1 class:
index : 17
score : 0.73828
class name : dog
Detection #1 (green):
Box: (x: 103, y: 15, w: 138, h: 369)
Top-1 class:
index : 17
score : 0.73047
class name : dog
Affichez les cadres de délimitation sur l'image d'entrée :
Essayez l' outil de démonstration CLI simple pour ObjectDetector avec votre propre modèle et vos données de test.
Exigences de compatibilité des modèles
L'API ObjectDetector attend un modèle TFLite avec des métadonnées de modèle TFLite obligatoires. Consultez des exemples de création de métadonnées pour les détecteurs d'objets à l'aide de l' API TensorFlow Lite Metadata Writer .
Les modèles de détecteurs d'objets compatibles doivent répondre aux exigences suivantes :
Tenseur de l'image d'entrée : (kTfLiteUInt8/kTfLiteFloat32)
- entrée d'image de taille
[batch x height x width x channels]. - L'inférence par lots n'est pas prise en charge (
batchdoit être 1). - seules les entrées RVB sont prises en charge (
channelsdoivent être au nombre de 3). - si le type est kTfLiteFloat32, les NormalizationOptions doivent être attachées aux métadonnées pour la normalisation des entrées.
- entrée d'image de taille
Les tenseurs de sortie doivent être les 4 sorties d'une opération
DetectionPostProcess, c'est à dire :- Tenseur des emplacements (kTfLiteFloat32)
- tenseur de taille
[1 x num_results x 4], le tableau interne représentant les cadres de délimitation sous la forme [haut, gauche, droite, bas]. - Les BoundingBoxProperties doivent être attachées aux métadonnées et doivent spécifier
type=BOUNDARIESet `coordonnée_type=RATIO.
- tenseur de taille
Tenseur des classes (kTfLiteFloat32)
- tenseur de taille
[1 x num_results], chaque valeur représentant l'index entier d'une classe. - Des cartes d'étiquettes facultatives (mais recommandées) peuvent être attachées en tant qu'AssociatedFile-s avec le type TENSOR_VALUE_LABELS, contenant une étiquette par ligne. Voir l' exemple de fichier d'étiquettes . Le premier AssociatedFile (le cas échéant) est utilisé pour remplir le champ
class_namedes résultats. Le champdisplay_nameest rempli à partir de l'AssociatedFile (le cas échéant) dont les paramètres régionaux correspondent au champdisplay_names_localedesObjectDetectorOptionsutilisés au moment de la création ("en" par défaut, c'est-à-dire l'anglais). Si aucun de ces éléments n'est disponible, seul le champindexdes résultats sera renseigné.
- tenseur de taille
Tenseur des scores (kTfLiteFloat32)
- tenseur de taille
[1 x num_results], chaque valeur représentant le score de l'objet détecté.
- tenseur de taille
Nombre de tenseur de détection (kTfLiteFloat32)
- entier num_results comme tenseur de taille
[1].
- entier num_results comme tenseur de taille
- Tenseur des emplacements (kTfLiteFloat32)