
| | |  צפה במקור ב-GitHub צפה במקור ב-GitHub |
הדרכה זו מכשירה מודל שנאי לתרגום מערך נתונים פורטוגזית לאנגלית . זוהי דוגמה מתקדמת המניחה ידע ביצירת טקסט ותשומת לב .
הרעיון המרכזי מאחורי מודל ה-Transformer הוא תשומת לב עצמית - היכולת לטפל במיקומים שונים של רצף הקלט כדי לחשב ייצוג של רצף זה. שנאי יוצר ערימות של שכבות תשומת לב עצמית והוא מוסבר להלן בסעיפים תשומת לב למוצר נקודות מוקטנות ותשומת לב מרובה ראשים .
דגם שנאי מטפל בקלט בגודל משתנה באמצעות ערימות של שכבות תשומת לב עצמית במקום RNNs או CNNs . לארכיטקטורה כללית זו יש מספר יתרונות:
- הוא אינו מניח הנחות לגבי היחסים הזמניים/מרחביים על פני הנתונים. זה אידיאלי לעיבוד קבוצה של אובייקטים (לדוגמה, יחידות StarCraft ).
- ניתן לחשב פלטי שכבה במקביל, במקום סדרה כמו RNN.
- פריטים מרוחקים יכולים להשפיע זה על הפלט של זה מבלי לעבור דרך הרבה שלבי RNN, או שכבות קונבולציה (ראה Scene Memory Transformer למשל).
- זה יכול ללמוד תלות ארוכת טווח. זהו אתגר במשימות רצף רבות.
החסרונות של ארכיטקטורה זו הם:
- עבור סדרת זמן, הפלט עבור שלב זמן מחושב מתוך כל ההיסטוריה במקום רק התשומות והמצב הנסתר הנוכחי. זה עשוי להיות פחות יעיל.
- אם לקלט יש קשר זמני/מרחבי, כמו טקסט, יש להוסיף קידוד מיקום כלשהו או שהמודל יראה למעשה שקית של מילים.
לאחר אימון המודל במחברת זו, תוכל להזין משפט פורטוגזית ולהחזיר את התרגום לאנגלית.
להכין
pip install tensorflow_datasetspip install -U tensorflow-text
import collections
import logging
import os
import pathlib
import re
import string
import sys
import time
import numpy as np
import matplotlib.pyplot as plt
import tensorflow_datasets as tfds
import tensorflow_text as text
import tensorflow as tf
logging.getLogger('tensorflow').setLevel(logging.ERROR) # suppress warnings
הורד את ערכת הנתונים
השתמש במערכי נתונים של TensorFlow כדי לטעון את מערך התרגום לפורטוגזית-אנגלית מפרויקט התרגום הפתוח של TED Talks .
מערך נתונים זה מכיל כ-50000 דוגמאות הדרכה, 1100 דוגמאות אימות ו-2000 דוגמאות מבחן.
examples, metadata = tfds.load('ted_hrlr_translate/pt_to_en', with_info=True,
as_supervised=True)
train_examples, val_examples = examples['train'], examples['validation']
האובייקט tf.data.Dataset המוחזר על ידי מערכי נתונים של TensorFlow מניב זוגות של דוגמאות טקסט:
for pt_examples, en_examples in train_examples.batch(3).take(1):
for pt in pt_examples.numpy():
print(pt.decode('utf-8'))
print()
for en in en_examples.numpy():
print(en.decode('utf-8'))
e quando melhoramos a procura , tiramos a única vantagem da impressão , que é a serendipidade . mas e se estes fatores fossem ativos ? mas eles não tinham a curiosidade de me testar . and when you improve searchability , you actually take away the one advantage of print , which is serendipity . but what if it were active ? but they did n't test for curiosity .
אסימון וביטול טקסט
אתה לא יכול לאמן דוגמנית ישירות על טקסט. תחילה יש להמיר את הטקסט לייצוג מספרי כלשהו. בדרך כלל, אתה ממיר את הטקסט לרצפים של מזהי אסימון, המשמשים כמדדים להטמעה.
יישום פופולרי אחד מודגם במדריך של Subword tokenizer בונה טוקיני מילות משנה ( text.BertTokenizer ) המותאמים למערך נתונים זה ומייצא אותם ב- saved_model .
הורד ופתח וייבא את saved_model :
model_name = "ted_hrlr_translate_pt_en_converter"
tf.keras.utils.get_file(
f"{model_name}.zip",
f"https://storage.googleapis.com/download.tensorflow.org/models/{model_name}.zip",
cache_dir='.', cache_subdir='', extract=True
)
Downloading data from https://storage.googleapis.com/download.tensorflow.org/models/ted_hrlr_translate_pt_en_converter.zip 188416/184801 [==============================] - 0s 0us/step 196608/184801 [===============================] - 0s 0us/step './ted_hrlr_translate_pt_en_converter.zip'
tokenizers = tf.saved_model.load(model_name)
ה- tf.saved_model מכיל שני אסימוני טקסט, אחד לאנגלית ואחד לפורטוגזית. לשניהם אותן שיטות:
[item for item in dir(tokenizers.en) if not item.startswith('_')]
['detokenize', 'get_reserved_tokens', 'get_vocab_path', 'get_vocab_size', 'lookup', 'tokenize', 'tokenizer', 'vocab']
שיטת ה- tokenize ממירה אצווה של מחרוזות לאצווה מרופדת של מזהי אסימון. שיטה זו מפצלת סימני פיסוק, אותיות קטנות ו-unicode מנרמלת את הקלט לפני ביצוע האסימון. הסטנדרטיזציה הזו לא נראית כאן מכיוון שנתוני הקלט כבר סטנדרטיים.
for en in en_examples.numpy():
print(en.decode('utf-8'))
and when you improve searchability , you actually take away the one advantage of print , which is serendipity . but what if it were active ? but they did n't test for curiosity .
encoded = tokenizers.en.tokenize(en_examples)
for row in encoded.to_list():
print(row)
[2, 72, 117, 79, 1259, 1491, 2362, 13, 79, 150, 184, 311, 71, 103, 2308, 74, 2679, 13, 148, 80, 55, 4840, 1434, 2423, 540, 15, 3] [2, 87, 90, 107, 76, 129, 1852, 30, 3] [2, 87, 83, 149, 50, 9, 56, 664, 85, 2512, 15, 3]
שיטת detokenize מנסה להמיר את מזהי האסימון האלה בחזרה לטקסט קריא אנושי:
round_trip = tokenizers.en.detokenize(encoded)
for line in round_trip.numpy():
print(line.decode('utf-8'))
and when you improve searchability , you actually take away the one advantage of print , which is serendipity . but what if it were active ? but they did n ' t test for curiosity .
שיטת lookup הרמה הנמוכה ממירה ממזהי אסימון לטקסט אסימון:
tokens = tokenizers.en.lookup(encoded)
tokens
<tf.RaggedTensor [[b'[START]', b'and', b'when', b'you', b'improve', b'search', b'##ability', b',', b'you', b'actually', b'take', b'away', b'the', b'one', b'advantage', b'of', b'print', b',', b'which', b'is', b's', b'##ere', b'##nd', b'##ip', b'##ity', b'.', b'[END]'] , [b'[START]', b'but', b'what', b'if', b'it', b'were', b'active', b'?', b'[END]'] , [b'[START]', b'but', b'they', b'did', b'n', b"'", b't', b'test', b'for', b'curiosity', b'.', b'[END]'] ]>
כאן אתה יכול לראות את היבט "תת-מילת" של הטוקנים. המילה "יכולת חיפוש" מפורקת ל"חיפוש ##יכולת" והמילה "סרנדיפיות" ל-"s ##ere ##nd ##ip ##ity"
הגדרת צינור קלט
כדי לבנות צינור קלט המתאים להדרכה, תחיל כמה טרנספורמציות על מערך הנתונים.
פונקציה זו תשמש כדי לקודד את קבוצות הטקסט הגולמי:
def tokenize_pairs(pt, en):
pt = tokenizers.pt.tokenize(pt)
# Convert from ragged to dense, padding with zeros.
pt = pt.to_tensor()
en = tokenizers.en.tokenize(en)
# Convert from ragged to dense, padding with zeros.
en = en.to_tensor()
return pt, en
הנה צינור קלט פשוט שמעבד, מערבב ומקבץ את הנתונים:
BUFFER_SIZE = 20000
BATCH_SIZE = 64
def make_batches(ds):
return (
ds
.cache()
.shuffle(BUFFER_SIZE)
.batch(BATCH_SIZE)
.map(tokenize_pairs, num_parallel_calls=tf.data.AUTOTUNE)
.prefetch(tf.data.AUTOTUNE))
train_batches = make_batches(train_examples)
val_batches = make_batches(val_examples)
קידוד מיקום
שכבות הקשב רואות את הקלט שלהן כקבוצה של וקטורים, ללא סדר רציף. מודל זה גם אינו מכיל שכבות חוזרות או קונבולוציוניות. בגלל זה מתווסף "קידוד מיקום" כדי לתת למודל קצת מידע על המיקום היחסי של האסימונים במשפט.
וקטור הקידוד המיקום מתווסף לווקטור ההטמעה. הטבעות מייצגות אסימון במרחב ד-מימדי שבו אסימונים בעלי משמעות דומה יהיו קרובים יותר זה לזה. אבל ההטבעות אינן מקודדות את המיקום היחסי של אסימונים במשפט. אז לאחר הוספת הקידוד המיקום, אסימונים יהיו קרובים יותר זה לזה בהתבסס על דמיון המשמעות שלהם ומיקומם במשפט , במרחב הד-מימדי.
הנוסחה לחישוב הקידוד המיקוםי היא כדלקמן:
\[\Large{PE_{(pos, 2i)} = \sin(pos / 10000^{2i / d_{model} })} \]
\[\Large{PE_{(pos, 2i+1)} = \cos(pos / 10000^{2i / d_{model} })} \]
def get_angles(pos, i, d_model):
angle_rates = 1 / np.power(10000, (2 * (i//2)) / np.float32(d_model))
return pos * angle_rates
def positional_encoding(position, d_model):
angle_rads = get_angles(np.arange(position)[:, np.newaxis],
np.arange(d_model)[np.newaxis, :],
d_model)
# apply sin to even indices in the array; 2i
angle_rads[:, 0::2] = np.sin(angle_rads[:, 0::2])
# apply cos to odd indices in the array; 2i+1
angle_rads[:, 1::2] = np.cos(angle_rads[:, 1::2])
pos_encoding = angle_rads[np.newaxis, ...]
return tf.cast(pos_encoding, dtype=tf.float32)
n, d = 2048, 512
pos_encoding = positional_encoding(n, d)
print(pos_encoding.shape)
pos_encoding = pos_encoding[0]
# Juggle the dimensions for the plot
pos_encoding = tf.reshape(pos_encoding, (n, d//2, 2))
pos_encoding = tf.transpose(pos_encoding, (2, 1, 0))
pos_encoding = tf.reshape(pos_encoding, (d, n))
plt.pcolormesh(pos_encoding, cmap='RdBu')
plt.ylabel('Depth')
plt.xlabel('Position')
plt.colorbar()
plt.show()
(1, 2048, 512)

מִסוּך
מסכה את כל אסימוני הפנקס ברצף. זה מבטיח שהדגם לא יתייחס לריפוד כאל קלט. המסכה מציינת היכן קיים ערך משטח 0 : היא מוציאה 1 באותם מקומות, ו 0 אחרת.
def create_padding_mask(seq):
seq = tf.cast(tf.math.equal(seq, 0), tf.float32)
# add extra dimensions to add the padding
# to the attention logits.
return seq[:, tf.newaxis, tf.newaxis, :] # (batch_size, 1, 1, seq_len)
x = tf.constant([[7, 6, 0, 0, 1], [1, 2, 3, 0, 0], [0, 0, 0, 4, 5]])
create_padding_mask(x)
<tf.Tensor: shape=(3, 1, 1, 5), dtype=float32, numpy=
array([[[[0., 0., 1., 1., 0.]]],
[[[0., 0., 0., 1., 1.]]],
[[[1., 1., 1., 0., 0.]]]], dtype=float32)>
מסכת ההסתכלות קדימה משמשת כדי להסוות את האסימונים העתידיים ברצף. במילים אחרות, המסכה מציינת באילו ערכים אסור להשתמש.
המשמעות היא שכדי לחזות את האסימון השלישי, ישמשו רק האסימון הראשון והשני. באופן דומה כדי לחזות את האסימון הרביעי, ישמשו רק האסימון הראשון, השני והשלישי וכן הלאה.
def create_look_ahead_mask(size):
mask = 1 - tf.linalg.band_part(tf.ones((size, size)), -1, 0)
return mask # (seq_len, seq_len)
x = tf.random.uniform((1, 3))
temp = create_look_ahead_mask(x.shape[1])
temp
<tf.Tensor: shape=(3, 3), dtype=float32, numpy=
array([[0., 1., 1.],
[0., 0., 1.],
[0., 0., 0.]], dtype=float32)>
תשומת לב למוצר נקודה מוקטנת
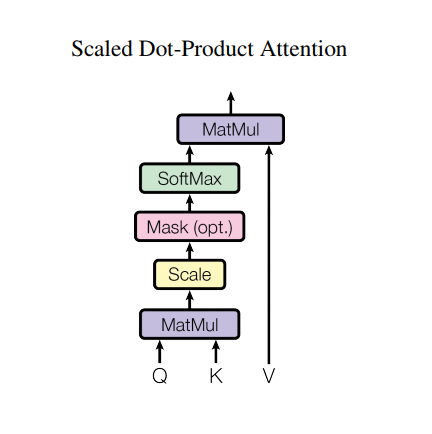
פונקציית הקשב המשמשת את השנאי לוקחת שלוש כניסות: Q (שאילתה), K (מפתח), V (ערך). המשוואה המשמשת לחישוב משקלי הקשב היא:
\[\Large{Attention(Q, K, V) = softmax_k\left(\frac{QK^T}{\sqrt{d_k} }\right) V} \]
תשומת הלב של הנקודה-מוצר מוגדלת לפי גורם של שורש ריבועי של העומק. זה נעשה בגלל שעבור ערכי עומק גדולים, תוצר הנקודה גדל בגודלו ודוחף את פונקציית softmax היכן שיש לו שיפועים קטנים וכתוצאה מכך softmax קשה מאוד.
לדוגמה, קחו בחשבון Q ו- K יש ממוצע של 0 ושונות של 1. לכפל המטריצה שלהם יהיה ממוצע של 0 ושונות של dk . אז השורש הריבועי של dk משמש לשינוי קנה מידה, כך שאתה מקבל שונות עקבית ללא קשר לערך של dk . אם השונות נמוכה מדי התפוקה עשויה להיות שטוחה מכדי לבצע אופטימיזציה יעילה. אם השונות גבוהה מדי, ה-softmax עשוי להיות רווי באתחול ומקשה על הלמידה.
המסכה מוכפלת ב-1e9 (קרוב לאינסוף שלילי). זה נעשה מכיוון שהמסכה מסוכמת בכפל המטריצה בקנה מידה של Q ו-K ומוחלת מיד לפני softmax. המטרה היא לאפס את התאים האלה, וכניסות שליליות גדולות ל-softmax כמעט אפס בפלט.
def scaled_dot_product_attention(q, k, v, mask):
"""Calculate the attention weights.
q, k, v must have matching leading dimensions.
k, v must have matching penultimate dimension, i.e.: seq_len_k = seq_len_v.
The mask has different shapes depending on its type(padding or look ahead)
but it must be broadcastable for addition.
Args:
q: query shape == (..., seq_len_q, depth)
k: key shape == (..., seq_len_k, depth)
v: value shape == (..., seq_len_v, depth_v)
mask: Float tensor with shape broadcastable
to (..., seq_len_q, seq_len_k). Defaults to None.
Returns:
output, attention_weights
"""
matmul_qk = tf.matmul(q, k, transpose_b=True) # (..., seq_len_q, seq_len_k)
# scale matmul_qk
dk = tf.cast(tf.shape(k)[-1], tf.float32)
scaled_attention_logits = matmul_qk / tf.math.sqrt(dk)
# add the mask to the scaled tensor.
if mask is not None:
scaled_attention_logits += (mask * -1e9)
# softmax is normalized on the last axis (seq_len_k) so that the scores
# add up to 1.
attention_weights = tf.nn.softmax(scaled_attention_logits, axis=-1) # (..., seq_len_q, seq_len_k)
output = tf.matmul(attention_weights, v) # (..., seq_len_q, depth_v)
return output, attention_weights
מכיוון שהנורמליזציה של softmax מתבצעת על K, הערכים שלה מחליטים את מידת החשיבות שניתנת ל-Q.
הפלט מייצג את הכפל של משקלי הקשב ואת וקטור ה-V (ערך). זה מבטיח שהאסימונים שאתה רוצה להתמקד בהם נשמרים כפי שהם והאסימונים הלא רלוונטיים יימחקו החוצה.
def print_out(q, k, v):
temp_out, temp_attn = scaled_dot_product_attention(
q, k, v, None)
print('Attention weights are:')
print(temp_attn)
print('Output is:')
print(temp_out)
np.set_printoptions(suppress=True)
temp_k = tf.constant([[10, 0, 0],
[0, 10, 0],
[0, 0, 10],
[0, 0, 10]], dtype=tf.float32) # (4, 3)
temp_v = tf.constant([[1, 0],
[10, 0],
[100, 5],
[1000, 6]], dtype=tf.float32) # (4, 2)
# This `query` aligns with the second `key`,
# so the second `value` is returned.
temp_q = tf.constant([[0, 10, 0]], dtype=tf.float32) # (1, 3)
print_out(temp_q, temp_k, temp_v)
Attention weights are: tf.Tensor([[0. 1. 0. 0.]], shape=(1, 4), dtype=float32) Output is: tf.Tensor([[10. 0.]], shape=(1, 2), dtype=float32)
# This query aligns with a repeated key (third and fourth),
# so all associated values get averaged.
temp_q = tf.constant([[0, 0, 10]], dtype=tf.float32) # (1, 3)
print_out(temp_q, temp_k, temp_v)
Attention weights are: tf.Tensor([[0. 0. 0.5 0.5]], shape=(1, 4), dtype=float32) Output is: tf.Tensor([[550. 5.5]], shape=(1, 2), dtype=float32)
# This query aligns equally with the first and second key,
# so their values get averaged.
temp_q = tf.constant([[10, 10, 0]], dtype=tf.float32) # (1, 3)
print_out(temp_q, temp_k, temp_v)
Attention weights are: tf.Tensor([[0.5 0.5 0. 0. ]], shape=(1, 4), dtype=float32) Output is: tf.Tensor([[5.5 0. ]], shape=(1, 2), dtype=float32)
העבר את כל השאילתות ביחד.
temp_q = tf.constant([[0, 0, 10],
[0, 10, 0],
[10, 10, 0]], dtype=tf.float32) # (3, 3)
print_out(temp_q, temp_k, temp_v)
Attention weights are: tf.Tensor( [[0. 0. 0.5 0.5] [0. 1. 0. 0. ] [0.5 0.5 0. 0. ]], shape=(3, 4), dtype=float32) Output is: tf.Tensor( [[550. 5.5] [ 10. 0. ] [ 5.5 0. ]], shape=(3, 2), dtype=float32)
תשומת לב מרובה ראשים
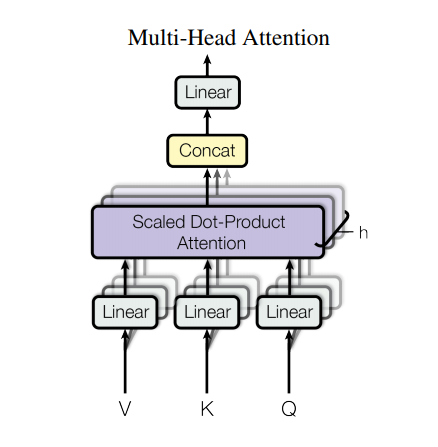
קשב רב ראשים מורכב מארבעה חלקים:
- שכבות ליניאריות.
- תשומת לב מוקטנת של נקודות-מוצר.
- שכבה לינארית סופית.
כל בלוק קשב רב ראשים מקבל שלוש כניסות; Q (שאילתה), K (מפתח), V (ערך). אלה מועברים דרך שכבות ליניאריות (צפופות) לפני פונקציית הקשב הרב-ראשית.
בתרשים לעיל (K,Q,V) מועברים דרך שכבות ליניאריות נפרדות ( Dense ) עבור כל ראש קשב. למען הפשטות/יעילות הקוד שלהלן מיישם זאת באמצעות שכבה אחת צפופה עם num_heads פי מספר נקודות. הפלט מסודר מחדש לצורה של (batch, num_heads, ...) לפני החלת פונקציית הקשב.
הפונקציה scaled_dot_product_attention שהוגדרה לעיל מופעלת בשיחה אחת, המשודרת לצורך יעילות. יש להשתמש במסכה מתאימה בשלב הקשב. לאחר מכן משרשרים את פלט הקשב עבור כל ראש (באמצעות tf.transpose ו- tf.reshape ) ומעבירים אותו לשכבה Dense סופית.
במקום ראש קשב אחד בודד, Q, K ו-V מפוצלים למספר ראשים מכיוון שהוא מאפשר למודל לטפל במשותף במידע מתתי מרחבי ייצוג שונים בעמדות שונות. לאחר הפיצול לכל ראש יש מימדיות מופחתת, כך שעלות החישוב הכוללת זהה לתשומת לב של ראש בודד עם מימדיות מלאה.
class MultiHeadAttention(tf.keras.layers.Layer):
def __init__(self, d_model, num_heads):
super(MultiHeadAttention, self).__init__()
self.num_heads = num_heads
self.d_model = d_model
assert d_model % self.num_heads == 0
self.depth = d_model // self.num_heads
self.wq = tf.keras.layers.Dense(d_model)
self.wk = tf.keras.layers.Dense(d_model)
self.wv = tf.keras.layers.Dense(d_model)
self.dense = tf.keras.layers.Dense(d_model)
def split_heads(self, x, batch_size):
"""Split the last dimension into (num_heads, depth).
Transpose the result such that the shape is (batch_size, num_heads, seq_len, depth)
"""
x = tf.reshape(x, (batch_size, -1, self.num_heads, self.depth))
return tf.transpose(x, perm=[0, 2, 1, 3])
def call(self, v, k, q, mask):
batch_size = tf.shape(q)[0]
q = self.wq(q) # (batch_size, seq_len, d_model)
k = self.wk(k) # (batch_size, seq_len, d_model)
v = self.wv(v) # (batch_size, seq_len, d_model)
q = self.split_heads(q, batch_size) # (batch_size, num_heads, seq_len_q, depth)
k = self.split_heads(k, batch_size) # (batch_size, num_heads, seq_len_k, depth)
v = self.split_heads(v, batch_size) # (batch_size, num_heads, seq_len_v, depth)
# scaled_attention.shape == (batch_size, num_heads, seq_len_q, depth)
# attention_weights.shape == (batch_size, num_heads, seq_len_q, seq_len_k)
scaled_attention, attention_weights = scaled_dot_product_attention(
q, k, v, mask)
scaled_attention = tf.transpose(scaled_attention, perm=[0, 2, 1, 3]) # (batch_size, seq_len_q, num_heads, depth)
concat_attention = tf.reshape(scaled_attention,
(batch_size, -1, self.d_model)) # (batch_size, seq_len_q, d_model)
output = self.dense(concat_attention) # (batch_size, seq_len_q, d_model)
return output, attention_weights
צור שכבת MultiHeadAttention כדי לנסות. בכל מיקום ברצף, y , MultiHeadAttention מריץ את כל 8 ראשי הקשב על פני כל שאר המיקומים ברצף, ומחזיר וקטור חדש באותו אורך בכל מיקום.
temp_mha = MultiHeadAttention(d_model=512, num_heads=8)
y = tf.random.uniform((1, 60, 512)) # (batch_size, encoder_sequence, d_model)
out, attn = temp_mha(y, k=y, q=y, mask=None)
out.shape, attn.shape
(TensorShape([1, 60, 512]), TensorShape([1, 8, 60, 60]))
נקודת הזנה קדימה רשת
רשת הזנה קדימה מבחינה נקודתית מורכבת משתי שכבות מחוברות במלואן עם הפעלת ReLU ביניהן.
def point_wise_feed_forward_network(d_model, dff):
return tf.keras.Sequential([
tf.keras.layers.Dense(dff, activation='relu'), # (batch_size, seq_len, dff)
tf.keras.layers.Dense(d_model) # (batch_size, seq_len, d_model)
])
sample_ffn = point_wise_feed_forward_network(512, 2048)
sample_ffn(tf.random.uniform((64, 50, 512))).shape
TensorShape([64, 50, 512])
מקודד ומפענח
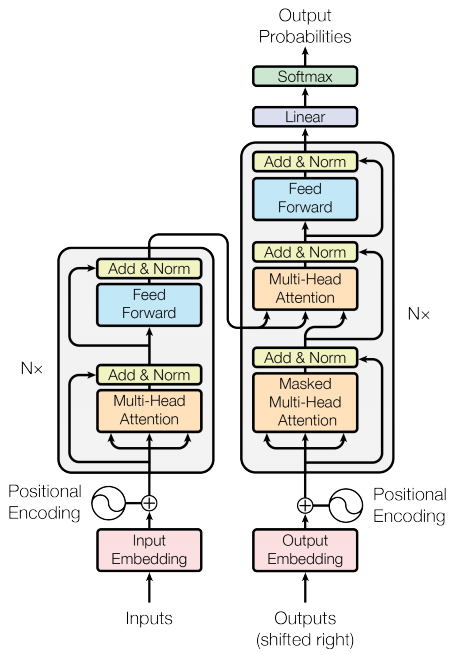
מודל השנאי עוקב אחר אותה דפוס כללי כמו רצף סטנדרטי לרצף עם מודל קשב .
- משפט הקלט מועבר דרך
Nשכבות מקודד שיוצרות פלט עבור כל אסימון ברצף. - המפענח מטפל בפלט של המקודד ובקלט שלו (תשומת לב עצמית) כדי לחזות את המילה הבאה.
שכבת מקודד
כל שכבת מקודד מורכבת משכבות משנה:
- קשב רב ראשים (עם מסיכת ריפוד)
- נקודות הזנה קדימה רשתות.
לכל אחת משכבות המשנה הללו יש חיבור שיורי סביבו ואחריו נורמליזציה של שכבה. חיבורים שיוריים עוזרים להימנע מבעיית השיפוע הנעלמת ברשתות עמוקות.
הפלט של כל שכבת משנה היא LayerNorm(x + Sublayer(x)) . הנורמליזציה מתבצעת על ציר d_model (האחרון). ישנן N שכבות מקודד בשנאי.
class EncoderLayer(tf.keras.layers.Layer):
def __init__(self, d_model, num_heads, dff, rate=0.1):
super(EncoderLayer, self).__init__()
self.mha = MultiHeadAttention(d_model, num_heads)
self.ffn = point_wise_feed_forward_network(d_model, dff)
self.layernorm1 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.layernorm2 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.dropout1 = tf.keras.layers.Dropout(rate)
self.dropout2 = tf.keras.layers.Dropout(rate)
def call(self, x, training, mask):
attn_output, _ = self.mha(x, x, x, mask) # (batch_size, input_seq_len, d_model)
attn_output = self.dropout1(attn_output, training=training)
out1 = self.layernorm1(x + attn_output) # (batch_size, input_seq_len, d_model)
ffn_output = self.ffn(out1) # (batch_size, input_seq_len, d_model)
ffn_output = self.dropout2(ffn_output, training=training)
out2 = self.layernorm2(out1 + ffn_output) # (batch_size, input_seq_len, d_model)
return out2
sample_encoder_layer = EncoderLayer(512, 8, 2048)
sample_encoder_layer_output = sample_encoder_layer(
tf.random.uniform((64, 43, 512)), False, None)
sample_encoder_layer_output.shape # (batch_size, input_seq_len, d_model)
TensorShape([64, 43, 512])
שכבת מפענח
כל שכבת מפענח מורכבת משכבות משנה:
- תשומת לב מרובת ראשים במסכה (עם מסכת מבט קדימה ומסכת ריפוד)
- קשב רב ראשים (עם מסיכת ריפוד). V (ערך) ו-K (מפתח) מקבלים את פלט המקודד ככניסות. Q (שאילתה) מקבל את הפלט מתת-שכבת הקשב הרב-ראשי המסוכה.
- נקודות הזנה קדימה רשתות
לכל אחת משכבות המשנה הללו יש חיבור שיורי סביבו ואחריו נורמליזציה של שכבה. הפלט של כל שכבת משנה היא LayerNorm(x + Sublayer(x)) . הנורמליזציה מתבצעת על ציר d_model (האחרון).
ישנן N שכבות מפענח בשנאי.
כאשר Q מקבל את הפלט מבלוק הקשב הראשון של המפענח, ו-K מקבל את פלט המקודד, משקלי הקשב מייצגים את החשיבות שניתנת לקלט של המפענח בהתבסס על הפלט של המקודד. במילים אחרות, המפענח חוזה את האסימון הבא על ידי התבוננות בפלט המקודד וטיפול עצמי בפלט שלו. ראה את ההדגמה לעיל בסעיף תשומת הלב של המוצר בקנה מידה.
class DecoderLayer(tf.keras.layers.Layer):
def __init__(self, d_model, num_heads, dff, rate=0.1):
super(DecoderLayer, self).__init__()
self.mha1 = MultiHeadAttention(d_model, num_heads)
self.mha2 = MultiHeadAttention(d_model, num_heads)
self.ffn = point_wise_feed_forward_network(d_model, dff)
self.layernorm1 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.layernorm2 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.layernorm3 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.dropout1 = tf.keras.layers.Dropout(rate)
self.dropout2 = tf.keras.layers.Dropout(rate)
self.dropout3 = tf.keras.layers.Dropout(rate)
def call(self, x, enc_output, training,
look_ahead_mask, padding_mask):
# enc_output.shape == (batch_size, input_seq_len, d_model)
attn1, attn_weights_block1 = self.mha1(x, x, x, look_ahead_mask) # (batch_size, target_seq_len, d_model)
attn1 = self.dropout1(attn1, training=training)
out1 = self.layernorm1(attn1 + x)
attn2, attn_weights_block2 = self.mha2(
enc_output, enc_output, out1, padding_mask) # (batch_size, target_seq_len, d_model)
attn2 = self.dropout2(attn2, training=training)
out2 = self.layernorm2(attn2 + out1) # (batch_size, target_seq_len, d_model)
ffn_output = self.ffn(out2) # (batch_size, target_seq_len, d_model)
ffn_output = self.dropout3(ffn_output, training=training)
out3 = self.layernorm3(ffn_output + out2) # (batch_size, target_seq_len, d_model)
return out3, attn_weights_block1, attn_weights_block2
sample_decoder_layer = DecoderLayer(512, 8, 2048)
sample_decoder_layer_output, _, _ = sample_decoder_layer(
tf.random.uniform((64, 50, 512)), sample_encoder_layer_output,
False, None, None)
sample_decoder_layer_output.shape # (batch_size, target_seq_len, d_model)
TensorShape([64, 50, 512])
קוֹדַאִי
Encoder מורכב מ:
- הטמעת קלט
- קידוד מיקום
- N שכבות מקודד
הקלט מועבר דרך הטבעה המסוכמת עם הקידוד המיקוםי. הפלט של סיכום זה הוא הקלט לשכבות המקודד. הפלט של המקודד הוא הקלט למפענח.
class Encoder(tf.keras.layers.Layer):
def __init__(self, num_layers, d_model, num_heads, dff, input_vocab_size,
maximum_position_encoding, rate=0.1):
super(Encoder, self).__init__()
self.d_model = d_model
self.num_layers = num_layers
self.embedding = tf.keras.layers.Embedding(input_vocab_size, d_model)
self.pos_encoding = positional_encoding(maximum_position_encoding,
self.d_model)
self.enc_layers = [EncoderLayer(d_model, num_heads, dff, rate)
for _ in range(num_layers)]
self.dropout = tf.keras.layers.Dropout(rate)
def call(self, x, training, mask):
seq_len = tf.shape(x)[1]
# adding embedding and position encoding.
x = self.embedding(x) # (batch_size, input_seq_len, d_model)
x *= tf.math.sqrt(tf.cast(self.d_model, tf.float32))
x += self.pos_encoding[:, :seq_len, :]
x = self.dropout(x, training=training)
for i in range(self.num_layers):
x = self.enc_layers[i](x, training, mask)
return x # (batch_size, input_seq_len, d_model)
sample_encoder = Encoder(num_layers=2, d_model=512, num_heads=8,
dff=2048, input_vocab_size=8500,
maximum_position_encoding=10000)
temp_input = tf.random.uniform((64, 62), dtype=tf.int64, minval=0, maxval=200)
sample_encoder_output = sample_encoder(temp_input, training=False, mask=None)
print(sample_encoder_output.shape) # (batch_size, input_seq_len, d_model)
(64, 62, 512)
מפענח
Decoder מורכב מ:
- הטמעת פלט
- קידוד מיקום
- N שכבות מפענח
המטרה עוברת הטמעה המסוכמת עם הקידוד המיקוםי. הפלט של סיכום זה הוא הקלט לשכבות המפענח. הפלט של המפענח הוא הקלט לשכבה הליניארית הסופית.
class Decoder(tf.keras.layers.Layer):
def __init__(self, num_layers, d_model, num_heads, dff, target_vocab_size,
maximum_position_encoding, rate=0.1):
super(Decoder, self).__init__()
self.d_model = d_model
self.num_layers = num_layers
self.embedding = tf.keras.layers.Embedding(target_vocab_size, d_model)
self.pos_encoding = positional_encoding(maximum_position_encoding, d_model)
self.dec_layers = [DecoderLayer(d_model, num_heads, dff, rate)
for _ in range(num_layers)]
self.dropout = tf.keras.layers.Dropout(rate)
def call(self, x, enc_output, training,
look_ahead_mask, padding_mask):
seq_len = tf.shape(x)[1]
attention_weights = {}
x = self.embedding(x) # (batch_size, target_seq_len, d_model)
x *= tf.math.sqrt(tf.cast(self.d_model, tf.float32))
x += self.pos_encoding[:, :seq_len, :]
x = self.dropout(x, training=training)
for i in range(self.num_layers):
x, block1, block2 = self.dec_layers[i](x, enc_output, training,
look_ahead_mask, padding_mask)
attention_weights[f'decoder_layer{i+1}_block1'] = block1
attention_weights[f'decoder_layer{i+1}_block2'] = block2
# x.shape == (batch_size, target_seq_len, d_model)
return x, attention_weights
sample_decoder = Decoder(num_layers=2, d_model=512, num_heads=8,
dff=2048, target_vocab_size=8000,
maximum_position_encoding=5000)
temp_input = tf.random.uniform((64, 26), dtype=tf.int64, minval=0, maxval=200)
output, attn = sample_decoder(temp_input,
enc_output=sample_encoder_output,
training=False,
look_ahead_mask=None,
padding_mask=None)
output.shape, attn['decoder_layer2_block2'].shape
(TensorShape([64, 26, 512]), TensorShape([64, 8, 26, 62]))
צור את השנאי
שנאי מורכב מהמקודד, המפענח ושכבה לינארית סופית. הפלט של המפענח הוא הקלט לשכבה הליניארית והפלט שלו מוחזר.
class Transformer(tf.keras.Model):
def __init__(self, num_layers, d_model, num_heads, dff, input_vocab_size,
target_vocab_size, pe_input, pe_target, rate=0.1):
super().__init__()
self.encoder = Encoder(num_layers, d_model, num_heads, dff,
input_vocab_size, pe_input, rate)
self.decoder = Decoder(num_layers, d_model, num_heads, dff,
target_vocab_size, pe_target, rate)
self.final_layer = tf.keras.layers.Dense(target_vocab_size)
def call(self, inputs, training):
# Keras models prefer if you pass all your inputs in the first argument
inp, tar = inputs
enc_padding_mask, look_ahead_mask, dec_padding_mask = self.create_masks(inp, tar)
enc_output = self.encoder(inp, training, enc_padding_mask) # (batch_size, inp_seq_len, d_model)
# dec_output.shape == (batch_size, tar_seq_len, d_model)
dec_output, attention_weights = self.decoder(
tar, enc_output, training, look_ahead_mask, dec_padding_mask)
final_output = self.final_layer(dec_output) # (batch_size, tar_seq_len, target_vocab_size)
return final_output, attention_weights
def create_masks(self, inp, tar):
# Encoder padding mask
enc_padding_mask = create_padding_mask(inp)
# Used in the 2nd attention block in the decoder.
# This padding mask is used to mask the encoder outputs.
dec_padding_mask = create_padding_mask(inp)
# Used in the 1st attention block in the decoder.
# It is used to pad and mask future tokens in the input received by
# the decoder.
look_ahead_mask = create_look_ahead_mask(tf.shape(tar)[1])
dec_target_padding_mask = create_padding_mask(tar)
look_ahead_mask = tf.maximum(dec_target_padding_mask, look_ahead_mask)
return enc_padding_mask, look_ahead_mask, dec_padding_mask
sample_transformer = Transformer(
num_layers=2, d_model=512, num_heads=8, dff=2048,
input_vocab_size=8500, target_vocab_size=8000,
pe_input=10000, pe_target=6000)
temp_input = tf.random.uniform((64, 38), dtype=tf.int64, minval=0, maxval=200)
temp_target = tf.random.uniform((64, 36), dtype=tf.int64, minval=0, maxval=200)
fn_out, _ = sample_transformer([temp_input, temp_target], training=False)
fn_out.shape # (batch_size, tar_seq_len, target_vocab_size)
TensorShape([64, 36, 8000])
הגדר היפרפרמטרים
כדי לשמור על דוגמה קטנה ומהירה יחסית, הערכים של num_layers, d_model, dff הופחתו.
מודל הבסיס המתואר במאמר בו נעשה שימוש: num_layers=6, d_model=512, dff=2048 .
num_layers = 4
d_model = 128
dff = 512
num_heads = 8
dropout_rate = 0.1
מייעל
השתמש ב- Adam Optimizer עם מתזמן קצב למידה מותאם אישית לפי הנוסחה בעיתון .
\[\Large{lrate = d_{model}^{-0.5} * \min(step{\_}num^{-0.5}, step{\_}num \cdot warmup{\_}steps^{-1.5})}\]
class CustomSchedule(tf.keras.optimizers.schedules.LearningRateSchedule):
def __init__(self, d_model, warmup_steps=4000):
super(CustomSchedule, self).__init__()
self.d_model = d_model
self.d_model = tf.cast(self.d_model, tf.float32)
self.warmup_steps = warmup_steps
def __call__(self, step):
arg1 = tf.math.rsqrt(step)
arg2 = step * (self.warmup_steps ** -1.5)
return tf.math.rsqrt(self.d_model) * tf.math.minimum(arg1, arg2)
learning_rate = CustomSchedule(d_model)
optimizer = tf.keras.optimizers.Adam(learning_rate, beta_1=0.9, beta_2=0.98,
epsilon=1e-9)
temp_learning_rate_schedule = CustomSchedule(d_model)
plt.plot(temp_learning_rate_schedule(tf.range(40000, dtype=tf.float32)))
plt.ylabel("Learning Rate")
plt.xlabel("Train Step")
Text(0.5, 0, 'Train Step')

הפסד ומדדים
מכיוון שרצפי המטרה מרופדים, חשוב להחיל מסיכת ריפוד בעת חישוב ההפסד.
loss_object = tf.keras.losses.SparseCategoricalCrossentropy(
from_logits=True, reduction='none')
def loss_function(real, pred):
mask = tf.math.logical_not(tf.math.equal(real, 0))
loss_ = loss_object(real, pred)
mask = tf.cast(mask, dtype=loss_.dtype)
loss_ *= mask
return tf.reduce_sum(loss_)/tf.reduce_sum(mask)
def accuracy_function(real, pred):
accuracies = tf.equal(real, tf.argmax(pred, axis=2))
mask = tf.math.logical_not(tf.math.equal(real, 0))
accuracies = tf.math.logical_and(mask, accuracies)
accuracies = tf.cast(accuracies, dtype=tf.float32)
mask = tf.cast(mask, dtype=tf.float32)
return tf.reduce_sum(accuracies)/tf.reduce_sum(mask)
train_loss = tf.keras.metrics.Mean(name='train_loss')
train_accuracy = tf.keras.metrics.Mean(name='train_accuracy')
הדרכה ותצפית
transformer = Transformer(
num_layers=num_layers,
d_model=d_model,
num_heads=num_heads,
dff=dff,
input_vocab_size=tokenizers.pt.get_vocab_size().numpy(),
target_vocab_size=tokenizers.en.get_vocab_size().numpy(),
pe_input=1000,
pe_target=1000,
rate=dropout_rate)
צור את נתיב המחסום ואת מנהל המחסום. זה ישמש לשמירת מחסומים בכל n עידנים.
checkpoint_path = "./checkpoints/train"
ckpt = tf.train.Checkpoint(transformer=transformer,
optimizer=optimizer)
ckpt_manager = tf.train.CheckpointManager(ckpt, checkpoint_path, max_to_keep=5)
# if a checkpoint exists, restore the latest checkpoint.
if ckpt_manager.latest_checkpoint:
ckpt.restore(ckpt_manager.latest_checkpoint)
print('Latest checkpoint restored!!')
המטרה מחולקת ל-tar_inp ו-tar_real. tar_inp מועבר כקלט למפענח. tar_real הוא אותו קלט המוזז ב-1: בכל מיקום ב- tar_input , tar_real מכיל את האסימון הבא שצריך לחזות.
לדוגמה, sentence = "SOS אריה בג'ונגל ישן EOS"
tar_inp = "SOS אריה בג'ונגל ישן"
tar_real = "אריה בג'ונגל ישן EOS"
השנאי הוא מודל אוטומטי רגרסיבי: הוא עושה תחזיות חלק אחד בכל פעם, ומשתמש בפלט שלו עד כה כדי להחליט מה לעשות הלאה.
במהלך ההכשרה דוגמה זו משתמשת בכוח מורה (כמו במדריך ליצירת טקסט ). כפיית מורים היא העברת התפוקה האמיתית לשלב הזמן הבא ללא קשר למה שהמודל חוזה בשלב הזמן הנוכחי.
כאשר השנאי מנבא כל אסימון, תשומת לב עצמית מאפשרת לו להסתכל על האסימונים הקודמים ברצף הקלט כדי לחזות טוב יותר את האסימון הבא.
כדי למנוע מהדגם להציץ בפלט הצפוי הדגם משתמש במסכת מבט קדימה.
EPOCHS = 20
# The @tf.function trace-compiles train_step into a TF graph for faster
# execution. The function specializes to the precise shape of the argument
# tensors. To avoid re-tracing due to the variable sequence lengths or variable
# batch sizes (the last batch is smaller), use input_signature to specify
# more generic shapes.
train_step_signature = [
tf.TensorSpec(shape=(None, None), dtype=tf.int64),
tf.TensorSpec(shape=(None, None), dtype=tf.int64),
]
@tf.function(input_signature=train_step_signature)
def train_step(inp, tar):
tar_inp = tar[:, :-1]
tar_real = tar[:, 1:]
with tf.GradientTape() as tape:
predictions, _ = transformer([inp, tar_inp],
training = True)
loss = loss_function(tar_real, predictions)
gradients = tape.gradient(loss, transformer.trainable_variables)
optimizer.apply_gradients(zip(gradients, transformer.trainable_variables))
train_loss(loss)
train_accuracy(accuracy_function(tar_real, predictions))
פורטוגזית משמשת כשפת הקלט ואנגלית היא שפת היעד.
for epoch in range(EPOCHS):
start = time.time()
train_loss.reset_states()
train_accuracy.reset_states()
# inp -> portuguese, tar -> english
for (batch, (inp, tar)) in enumerate(train_batches):
train_step(inp, tar)
if batch % 50 == 0:
print(f'Epoch {epoch + 1} Batch {batch} Loss {train_loss.result():.4f} Accuracy {train_accuracy.result():.4f}')
if (epoch + 1) % 5 == 0:
ckpt_save_path = ckpt_manager.save()
print(f'Saving checkpoint for epoch {epoch+1} at {ckpt_save_path}')
print(f'Epoch {epoch + 1} Loss {train_loss.result():.4f} Accuracy {train_accuracy.result():.4f}')
print(f'Time taken for 1 epoch: {time.time() - start:.2f} secs\n')
Epoch 1 Batch 0 Loss 8.8600 Accuracy 0.0000 Epoch 1 Batch 50 Loss 8.7935 Accuracy 0.0082 Epoch 1 Batch 100 Loss 8.6902 Accuracy 0.0273 Epoch 1 Batch 150 Loss 8.5769 Accuracy 0.0335 Epoch 1 Batch 200 Loss 8.4387 Accuracy 0.0365 Epoch 1 Batch 250 Loss 8.2718 Accuracy 0.0386 Epoch 1 Batch 300 Loss 8.0845 Accuracy 0.0412 Epoch 1 Batch 350 Loss 7.8877 Accuracy 0.0481 Epoch 1 Batch 400 Loss 7.7002 Accuracy 0.0552 Epoch 1 Batch 450 Loss 7.5304 Accuracy 0.0629 Epoch 1 Batch 500 Loss 7.3857 Accuracy 0.0702 Epoch 1 Batch 550 Loss 7.2542 Accuracy 0.0776 Epoch 1 Batch 600 Loss 7.1327 Accuracy 0.0851 Epoch 1 Batch 650 Loss 7.0164 Accuracy 0.0930 Epoch 1 Batch 700 Loss 6.9088 Accuracy 0.1003 Epoch 1 Batch 750 Loss 6.8080 Accuracy 0.1070 Epoch 1 Batch 800 Loss 6.7173 Accuracy 0.1129 Epoch 1 Loss 6.7021 Accuracy 0.1139 Time taken for 1 epoch: 58.85 secs Epoch 2 Batch 0 Loss 5.2952 Accuracy 0.2221 Epoch 2 Batch 50 Loss 5.2513 Accuracy 0.2094 Epoch 2 Batch 100 Loss 5.2103 Accuracy 0.2140 Epoch 2 Batch 150 Loss 5.1780 Accuracy 0.2176 Epoch 2 Batch 200 Loss 5.1436 Accuracy 0.2218 Epoch 2 Batch 250 Loss 5.1173 Accuracy 0.2246 Epoch 2 Batch 300 Loss 5.0939 Accuracy 0.2269 Epoch 2 Batch 350 Loss 5.0719 Accuracy 0.2295 Epoch 2 Batch 400 Loss 5.0508 Accuracy 0.2318 Epoch 2 Batch 450 Loss 5.0308 Accuracy 0.2337 Epoch 2 Batch 500 Loss 5.0116 Accuracy 0.2353 Epoch 2 Batch 550 Loss 4.9897 Accuracy 0.2376 Epoch 2 Batch 600 Loss 4.9701 Accuracy 0.2394 Epoch 2 Batch 650 Loss 4.9543 Accuracy 0.2407 Epoch 2 Batch 700 Loss 4.9345 Accuracy 0.2425 Epoch 2 Batch 750 Loss 4.9169 Accuracy 0.2442 Epoch 2 Batch 800 Loss 4.9007 Accuracy 0.2455 Epoch 2 Loss 4.8988 Accuracy 0.2456 Time taken for 1 epoch: 45.69 secs Epoch 3 Batch 0 Loss 4.7236 Accuracy 0.2578 Epoch 3 Batch 50 Loss 4.5860 Accuracy 0.2705 Epoch 3 Batch 100 Loss 4.5758 Accuracy 0.2723 Epoch 3 Batch 150 Loss 4.5789 Accuracy 0.2728 Epoch 3 Batch 200 Loss 4.5699 Accuracy 0.2737 Epoch 3 Batch 250 Loss 4.5529 Accuracy 0.2753 Epoch 3 Batch 300 Loss 4.5462 Accuracy 0.2753 Epoch 3 Batch 350 Loss 4.5377 Accuracy 0.2762 Epoch 3 Batch 400 Loss 4.5301 Accuracy 0.2764 Epoch 3 Batch 450 Loss 4.5155 Accuracy 0.2776 Epoch 3 Batch 500 Loss 4.5036 Accuracy 0.2787 Epoch 3 Batch 550 Loss 4.4950 Accuracy 0.2794 Epoch 3 Batch 600 Loss 4.4860 Accuracy 0.2804 Epoch 3 Batch 650 Loss 4.4753 Accuracy 0.2814 Epoch 3 Batch 700 Loss 4.4643 Accuracy 0.2823 Epoch 3 Batch 750 Loss 4.4530 Accuracy 0.2837 Epoch 3 Batch 800 Loss 4.4401 Accuracy 0.2852 Epoch 3 Loss 4.4375 Accuracy 0.2855 Time taken for 1 epoch: 45.96 secs Epoch 4 Batch 0 Loss 3.9880 Accuracy 0.3285 Epoch 4 Batch 50 Loss 4.1496 Accuracy 0.3146 Epoch 4 Batch 100 Loss 4.1353 Accuracy 0.3146 Epoch 4 Batch 150 Loss 4.1263 Accuracy 0.3153 Epoch 4 Batch 200 Loss 4.1171 Accuracy 0.3165 Epoch 4 Batch 250 Loss 4.1144 Accuracy 0.3169 Epoch 4 Batch 300 Loss 4.0976 Accuracy 0.3190 Epoch 4 Batch 350 Loss 4.0848 Accuracy 0.3206 Epoch 4 Batch 400 Loss 4.0703 Accuracy 0.3228 Epoch 4 Batch 450 Loss 4.0569 Accuracy 0.3247 Epoch 4 Batch 500 Loss 4.0429 Accuracy 0.3265 Epoch 4 Batch 550 Loss 4.0231 Accuracy 0.3291 Epoch 4 Batch 600 Loss 4.0075 Accuracy 0.3311 Epoch 4 Batch 650 Loss 3.9933 Accuracy 0.3331 Epoch 4 Batch 700 Loss 3.9778 Accuracy 0.3353 Epoch 4 Batch 750 Loss 3.9625 Accuracy 0.3375 Epoch 4 Batch 800 Loss 3.9505 Accuracy 0.3393 Epoch 4 Loss 3.9483 Accuracy 0.3397 Time taken for 1 epoch: 45.59 secs Epoch 5 Batch 0 Loss 3.7342 Accuracy 0.3712 Epoch 5 Batch 50 Loss 3.5723 Accuracy 0.3851 Epoch 5 Batch 100 Loss 3.5656 Accuracy 0.3861 Epoch 5 Batch 150 Loss 3.5706 Accuracy 0.3857 Epoch 5 Batch 200 Loss 3.5701 Accuracy 0.3863 Epoch 5 Batch 250 Loss 3.5621 Accuracy 0.3877 Epoch 5 Batch 300 Loss 3.5527 Accuracy 0.3887 Epoch 5 Batch 350 Loss 3.5429 Accuracy 0.3904 Epoch 5 Batch 400 Loss 3.5318 Accuracy 0.3923 Epoch 5 Batch 450 Loss 3.5238 Accuracy 0.3937 Epoch 5 Batch 500 Loss 3.5141 Accuracy 0.3949 Epoch 5 Batch 550 Loss 3.5066 Accuracy 0.3958 Epoch 5 Batch 600 Loss 3.4956 Accuracy 0.3974 Epoch 5 Batch 650 Loss 3.4876 Accuracy 0.3986 Epoch 5 Batch 700 Loss 3.4788 Accuracy 0.4000 Epoch 5 Batch 750 Loss 3.4676 Accuracy 0.4014 Epoch 5 Batch 800 Loss 3.4590 Accuracy 0.4027 Saving checkpoint for epoch 5 at ./checkpoints/train/ckpt-1 Epoch 5 Loss 3.4583 Accuracy 0.4029 Time taken for 1 epoch: 46.04 secs Epoch 6 Batch 0 Loss 3.0131 Accuracy 0.4610 Epoch 6 Batch 50 Loss 3.1403 Accuracy 0.4404 Epoch 6 Batch 100 Loss 3.1320 Accuracy 0.4422 Epoch 6 Batch 150 Loss 3.1314 Accuracy 0.4425 Epoch 6 Batch 200 Loss 3.1450 Accuracy 0.4411 Epoch 6 Batch 250 Loss 3.1438 Accuracy 0.4405 Epoch 6 Batch 300 Loss 3.1306 Accuracy 0.4424 Epoch 6 Batch 350 Loss 3.1161 Accuracy 0.4445 Epoch 6 Batch 400 Loss 3.1097 Accuracy 0.4453 Epoch 6 Batch 450 Loss 3.0983 Accuracy 0.4469 Epoch 6 Batch 500 Loss 3.0900 Accuracy 0.4483 Epoch 6 Batch 550 Loss 3.0816 Accuracy 0.4496 Epoch 6 Batch 600 Loss 3.0740 Accuracy 0.4507 Epoch 6 Batch 650 Loss 3.0695 Accuracy 0.4514 Epoch 6 Batch 700 Loss 3.0602 Accuracy 0.4528 Epoch 6 Batch 750 Loss 3.0528 Accuracy 0.4539 Epoch 6 Batch 800 Loss 3.0436 Accuracy 0.4553 Epoch 6 Loss 3.0425 Accuracy 0.4554 Time taken for 1 epoch: 46.13 secs Epoch 7 Batch 0 Loss 2.7147 Accuracy 0.4940 Epoch 7 Batch 50 Loss 2.7671 Accuracy 0.4863 Epoch 7 Batch 100 Loss 2.7369 Accuracy 0.4934 Epoch 7 Batch 150 Loss 2.7562 Accuracy 0.4909 Epoch 7 Batch 200 Loss 2.7441 Accuracy 0.4926 Epoch 7 Batch 250 Loss 2.7464 Accuracy 0.4929 Epoch 7 Batch 300 Loss 2.7430 Accuracy 0.4932 Epoch 7 Batch 350 Loss 2.7342 Accuracy 0.4944 Epoch 7 Batch 400 Loss 2.7271 Accuracy 0.4954 Epoch 7 Batch 450 Loss 2.7215 Accuracy 0.4963 Epoch 7 Batch 500 Loss 2.7157 Accuracy 0.4972 Epoch 7 Batch 550 Loss 2.7123 Accuracy 0.4978 Epoch 7 Batch 600 Loss 2.7071 Accuracy 0.4985 Epoch 7 Batch 650 Loss 2.7038 Accuracy 0.4990 Epoch 7 Batch 700 Loss 2.6979 Accuracy 0.5002 Epoch 7 Batch 750 Loss 2.6946 Accuracy 0.5007 Epoch 7 Batch 800 Loss 2.6923 Accuracy 0.5013 Epoch 7 Loss 2.6913 Accuracy 0.5015 Time taken for 1 epoch: 46.02 secs Epoch 8 Batch 0 Loss 2.3681 Accuracy 0.5459 Epoch 8 Batch 50 Loss 2.4812 Accuracy 0.5260 Epoch 8 Batch 100 Loss 2.4682 Accuracy 0.5294 Epoch 8 Batch 150 Loss 2.4743 Accuracy 0.5287 Epoch 8 Batch 200 Loss 2.4625 Accuracy 0.5303 Epoch 8 Batch 250 Loss 2.4627 Accuracy 0.5303 Epoch 8 Batch 300 Loss 2.4624 Accuracy 0.5308 Epoch 8 Batch 350 Loss 2.4586 Accuracy 0.5314 Epoch 8 Batch 400 Loss 2.4532 Accuracy 0.5324 Epoch 8 Batch 450 Loss 2.4530 Accuracy 0.5326 Epoch 8 Batch 500 Loss 2.4508 Accuracy 0.5330 Epoch 8 Batch 550 Loss 2.4481 Accuracy 0.5338 Epoch 8 Batch 600 Loss 2.4455 Accuracy 0.5343 Epoch 8 Batch 650 Loss 2.4427 Accuracy 0.5348 Epoch 8 Batch 700 Loss 2.4399 Accuracy 0.5352 Epoch 8 Batch 750 Loss 2.4392 Accuracy 0.5353 Epoch 8 Batch 800 Loss 2.4367 Accuracy 0.5358 Epoch 8 Loss 2.4357 Accuracy 0.5360 Time taken for 1 epoch: 45.31 secs Epoch 9 Batch 0 Loss 2.1790 Accuracy 0.5595 Epoch 9 Batch 50 Loss 2.2201 Accuracy 0.5676 Epoch 9 Batch 100 Loss 2.2420 Accuracy 0.5629 Epoch 9 Batch 150 Loss 2.2444 Accuracy 0.5623 Epoch 9 Batch 200 Loss 2.2535 Accuracy 0.5610 Epoch 9 Batch 250 Loss 2.2562 Accuracy 0.5603 Epoch 9 Batch 300 Loss 2.2572 Accuracy 0.5603 Epoch 9 Batch 350 Loss 2.2646 Accuracy 0.5592 Epoch 9 Batch 400 Loss 2.2624 Accuracy 0.5597 Epoch 9 Batch 450 Loss 2.2595 Accuracy 0.5601 Epoch 9 Batch 500 Loss 2.2598 Accuracy 0.5600 Epoch 9 Batch 550 Loss 2.2590 Accuracy 0.5602 Epoch 9 Batch 600 Loss 2.2563 Accuracy 0.5607 Epoch 9 Batch 650 Loss 2.2578 Accuracy 0.5606 Epoch 9 Batch 700 Loss 2.2550 Accuracy 0.5611 Epoch 9 Batch 750 Loss 2.2536 Accuracy 0.5614 Epoch 9 Batch 800 Loss 2.2511 Accuracy 0.5618 Epoch 9 Loss 2.2503 Accuracy 0.5620 Time taken for 1 epoch: 44.87 secs Epoch 10 Batch 0 Loss 2.0921 Accuracy 0.5928 Epoch 10 Batch 50 Loss 2.1196 Accuracy 0.5788 Epoch 10 Batch 100 Loss 2.0969 Accuracy 0.5828 Epoch 10 Batch 150 Loss 2.0954 Accuracy 0.5834 Epoch 10 Batch 200 Loss 2.0965 Accuracy 0.5827 Epoch 10 Batch 250 Loss 2.1029 Accuracy 0.5822 Epoch 10 Batch 300 Loss 2.0999 Accuracy 0.5827 Epoch 10 Batch 350 Loss 2.1007 Accuracy 0.5825 Epoch 10 Batch 400 Loss 2.1011 Accuracy 0.5825 Epoch 10 Batch 450 Loss 2.1020 Accuracy 0.5826 Epoch 10 Batch 500 Loss 2.0977 Accuracy 0.5831 Epoch 10 Batch 550 Loss 2.0984 Accuracy 0.5831 Epoch 10 Batch 600 Loss 2.0985 Accuracy 0.5832 Epoch 10 Batch 650 Loss 2.1006 Accuracy 0.5830 Epoch 10 Batch 700 Loss 2.1017 Accuracy 0.5829 Epoch 10 Batch 750 Loss 2.1058 Accuracy 0.5825 Epoch 10 Batch 800 Loss 2.1059 Accuracy 0.5825 Saving checkpoint for epoch 10 at ./checkpoints/train/ckpt-2 Epoch 10 Loss 2.1060 Accuracy 0.5825 Time taken for 1 epoch: 45.06 secs Epoch 11 Batch 0 Loss 2.1150 Accuracy 0.5829 Epoch 11 Batch 50 Loss 1.9694 Accuracy 0.6017 Epoch 11 Batch 100 Loss 1.9746 Accuracy 0.6007 Epoch 11 Batch 150 Loss 1.9787 Accuracy 0.5996 Epoch 11 Batch 200 Loss 1.9798 Accuracy 0.5992 Epoch 11 Batch 250 Loss 1.9781 Accuracy 0.5998 Epoch 11 Batch 300 Loss 1.9772 Accuracy 0.5999 Epoch 11 Batch 350 Loss 1.9807 Accuracy 0.5995 Epoch 11 Batch 400 Loss 1.9836 Accuracy 0.5990 Epoch 11 Batch 450 Loss 1.9854 Accuracy 0.5986 Epoch 11 Batch 500 Loss 1.9832 Accuracy 0.5993 Epoch 11 Batch 550 Loss 1.9828 Accuracy 0.5993 Epoch 11 Batch 600 Loss 1.9812 Accuracy 0.5996 Epoch 11 Batch 650 Loss 1.9822 Accuracy 0.5996 Epoch 11 Batch 700 Loss 1.9825 Accuracy 0.5997 Epoch 11 Batch 750 Loss 1.9848 Accuracy 0.5994 Epoch 11 Batch 800 Loss 1.9883 Accuracy 0.5990 Epoch 11 Loss 1.9891 Accuracy 0.5989 Time taken for 1 epoch: 44.58 secs Epoch 12 Batch 0 Loss 1.8522 Accuracy 0.6168 Epoch 12 Batch 50 Loss 1.8462 Accuracy 0.6167 Epoch 12 Batch 100 Loss 1.8434 Accuracy 0.6191 Epoch 12 Batch 150 Loss 1.8506 Accuracy 0.6189 Epoch 12 Batch 200 Loss 1.8582 Accuracy 0.6178 Epoch 12 Batch 250 Loss 1.8732 Accuracy 0.6155 Epoch 12 Batch 300 Loss 1.8725 Accuracy 0.6159 Epoch 12 Batch 350 Loss 1.8708 Accuracy 0.6163 Epoch 12 Batch 400 Loss 1.8696 Accuracy 0.6164 Epoch 12 Batch 450 Loss 1.8696 Accuracy 0.6168 Epoch 12 Batch 500 Loss 1.8748 Accuracy 0.6160 Epoch 12 Batch 550 Loss 1.8793 Accuracy 0.6153 Epoch 12 Batch 600 Loss 1.8826 Accuracy 0.6149 Epoch 12 Batch 650 Loss 1.8851 Accuracy 0.6145 Epoch 12 Batch 700 Loss 1.8878 Accuracy 0.6143 Epoch 12 Batch 750 Loss 1.8881 Accuracy 0.6142 Epoch 12 Batch 800 Loss 1.8906 Accuracy 0.6139 Epoch 12 Loss 1.8919 Accuracy 0.6137 Time taken for 1 epoch: 44.87 secs Epoch 13 Batch 0 Loss 1.7038 Accuracy 0.6438 Epoch 13 Batch 50 Loss 1.7587 Accuracy 0.6309 Epoch 13 Batch 100 Loss 1.7641 Accuracy 0.6313 Epoch 13 Batch 150 Loss 1.7736 Accuracy 0.6299 Epoch 13 Batch 200 Loss 1.7743 Accuracy 0.6299 Epoch 13 Batch 250 Loss 1.7787 Accuracy 0.6293 Epoch 13 Batch 300 Loss 1.7820 Accuracy 0.6286 Epoch 13 Batch 350 Loss 1.7890 Accuracy 0.6276 Epoch 13 Batch 400 Loss 1.7963 Accuracy 0.6264 Epoch 13 Batch 450 Loss 1.7984 Accuracy 0.6261 Epoch 13 Batch 500 Loss 1.8014 Accuracy 0.6256 Epoch 13 Batch 550 Loss 1.8018 Accuracy 0.6255 Epoch 13 Batch 600 Loss 1.8033 Accuracy 0.6253 Epoch 13 Batch 650 Loss 1.8057 Accuracy 0.6250 Epoch 13 Batch 700 Loss 1.8100 Accuracy 0.6246 Epoch 13 Batch 750 Loss 1.8123 Accuracy 0.6244 Epoch 13 Batch 800 Loss 1.8123 Accuracy 0.6246 Epoch 13 Loss 1.8123 Accuracy 0.6246 Time taken for 1 epoch: 45.34 secs Epoch 14 Batch 0 Loss 2.0031 Accuracy 0.5889 Epoch 14 Batch 50 Loss 1.6906 Accuracy 0.6432 Epoch 14 Batch 100 Loss 1.7077 Accuracy 0.6407 Epoch 14 Batch 150 Loss 1.7113 Accuracy 0.6401 Epoch 14 Batch 200 Loss 1.7192 Accuracy 0.6382 Epoch 14 Batch 250 Loss 1.7220 Accuracy 0.6377 Epoch 14 Batch 300 Loss 1.7222 Accuracy 0.6376 Epoch 14 Batch 350 Loss 1.7250 Accuracy 0.6372 Epoch 14 Batch 400 Loss 1.7220 Accuracy 0.6377 Epoch 14 Batch 450 Loss 1.7209 Accuracy 0.6380 Epoch 14 Batch 500 Loss 1.7248 Accuracy 0.6377 Epoch 14 Batch 550 Loss 1.7264 Accuracy 0.6374 Epoch 14 Batch 600 Loss 1.7283 Accuracy 0.6373 Epoch 14 Batch 650 Loss 1.7307 Accuracy 0.6372 Epoch 14 Batch 700 Loss 1.7334 Accuracy 0.6367 Epoch 14 Batch 750 Loss 1.7372 Accuracy 0.6362 Epoch 14 Batch 800 Loss 1.7398 Accuracy 0.6358 Epoch 14 Loss 1.7396 Accuracy 0.6358 Time taken for 1 epoch: 46.00 secs Epoch 15 Batch 0 Loss 1.6520 Accuracy 0.6395 Epoch 15 Batch 50 Loss 1.6565 Accuracy 0.6480 Epoch 15 Batch 100 Loss 1.6396 Accuracy 0.6495 Epoch 15 Batch 150 Loss 1.6473 Accuracy 0.6488 Epoch 15 Batch 200 Loss 1.6486 Accuracy 0.6488 Epoch 15 Batch 250 Loss 1.6539 Accuracy 0.6483 Epoch 15 Batch 300 Loss 1.6595 Accuracy 0.6473 Epoch 15 Batch 350 Loss 1.6591 Accuracy 0.6472 Epoch 15 Batch 400 Loss 1.6584 Accuracy 0.6470 Epoch 15 Batch 450 Loss 1.6614 Accuracy 0.6467 Epoch 15 Batch 500 Loss 1.6617 Accuracy 0.6468 Epoch 15 Batch 550 Loss 1.6648 Accuracy 0.6464 Epoch 15 Batch 600 Loss 1.6680 Accuracy 0.6459 Epoch 15 Batch 650 Loss 1.6688 Accuracy 0.6459 Epoch 15 Batch 700 Loss 1.6714 Accuracy 0.6456 Epoch 15 Batch 750 Loss 1.6756 Accuracy 0.6450 Epoch 15 Batch 800 Loss 1.6790 Accuracy 0.6445 Saving checkpoint for epoch 15 at ./checkpoints/train/ckpt-3 Epoch 15 Loss 1.6786 Accuracy 0.6446 Time taken for 1 epoch: 46.56 secs Epoch 16 Batch 0 Loss 1.5922 Accuracy 0.6547 Epoch 16 Batch 50 Loss 1.5757 Accuracy 0.6599 Epoch 16 Batch 100 Loss 1.5844 Accuracy 0.6591 Epoch 16 Batch 150 Loss 1.5927 Accuracy 0.6579 Epoch 16 Batch 200 Loss 1.5944 Accuracy 0.6575 Epoch 16 Batch 250 Loss 1.5972 Accuracy 0.6571 Epoch 16 Batch 300 Loss 1.5999 Accuracy 0.6568 Epoch 16 Batch 350 Loss 1.6029 Accuracy 0.6561 Epoch 16 Batch 400 Loss 1.6053 Accuracy 0.6558 Epoch 16 Batch 450 Loss 1.6056 Accuracy 0.6557 Epoch 16 Batch 500 Loss 1.6094 Accuracy 0.6553 Epoch 16 Batch 550 Loss 1.6125 Accuracy 0.6548 Epoch 16 Batch 600 Loss 1.6149 Accuracy 0.6543 Epoch 16 Batch 650 Loss 1.6171 Accuracy 0.6541 Epoch 16 Batch 700 Loss 1.6201 Accuracy 0.6537 Epoch 16 Batch 750 Loss 1.6229 Accuracy 0.6533 Epoch 16 Batch 800 Loss 1.6252 Accuracy 0.6531 Epoch 16 Loss 1.6253 Accuracy 0.6531 Time taken for 1 epoch: 45.84 secs Epoch 17 Batch 0 Loss 1.6605 Accuracy 0.6482 Epoch 17 Batch 50 Loss 1.5219 Accuracy 0.6692 Epoch 17 Batch 100 Loss 1.5292 Accuracy 0.6681 Epoch 17 Batch 150 Loss 1.5324 Accuracy 0.6674 Epoch 17 Batch 200 Loss 1.5379 Accuracy 0.6666 Epoch 17 Batch 250 Loss 1.5416 Accuracy 0.6656 Epoch 17 Batch 300 Loss 1.5480 Accuracy 0.6646 Epoch 17 Batch 350 Loss 1.5522 Accuracy 0.6639 Epoch 17 Batch 400 Loss 1.5556 Accuracy 0.6634 Epoch 17 Batch 450 Loss 1.5567 Accuracy 0.6634 Epoch 17 Batch 500 Loss 1.5606 Accuracy 0.6629 Epoch 17 Batch 550 Loss 1.5641 Accuracy 0.6624 Epoch 17 Batch 600 Loss 1.5659 Accuracy 0.6621 Epoch 17 Batch 650 Loss 1.5685 Accuracy 0.6618 Epoch 17 Batch 700 Loss 1.5716 Accuracy 0.6614 Epoch 17 Batch 750 Loss 1.5748 Accuracy 0.6610 Epoch 17 Batch 800 Loss 1.5764 Accuracy 0.6609 Epoch 17 Loss 1.5773 Accuracy 0.6607 Time taken for 1 epoch: 45.01 secs Epoch 18 Batch 0 Loss 1.5065 Accuracy 0.6638 Epoch 18 Batch 50 Loss 1.4985 Accuracy 0.6713 Epoch 18 Batch 100 Loss 1.4979 Accuracy 0.6721 Epoch 18 Batch 150 Loss 1.5022 Accuracy 0.6712 Epoch 18 Batch 200 Loss 1.5012 Accuracy 0.6714 Epoch 18 Batch 250 Loss 1.5000 Accuracy 0.6716 Epoch 18 Batch 300 Loss 1.5044 Accuracy 0.6710 Epoch 18 Batch 350 Loss 1.5019 Accuracy 0.6719 Epoch 18 Batch 400 Loss 1.5053 Accuracy 0.6713 Epoch 18 Batch 450 Loss 1.5091 Accuracy 0.6707 Epoch 18 Batch 500 Loss 1.5131 Accuracy 0.6701 Epoch 18 Batch 550 Loss 1.5152 Accuracy 0.6698 Epoch 18 Batch 600 Loss 1.5177 Accuracy 0.6694 Epoch 18 Batch 650 Loss 1.5211 Accuracy 0.6689 Epoch 18 Batch 700 Loss 1.5246 Accuracy 0.6684 Epoch 18 Batch 750 Loss 1.5251 Accuracy 0.6685 Epoch 18 Batch 800 Loss 1.5302 Accuracy 0.6678 Epoch 18 Loss 1.5314 Accuracy 0.6675 Time taken for 1 epoch: 44.91 secs Epoch 19 Batch 0 Loss 1.2939 Accuracy 0.7080 Epoch 19 Batch 50 Loss 1.4311 Accuracy 0.6839 Epoch 19 Batch 100 Loss 1.4424 Accuracy 0.6812 Epoch 19 Batch 150 Loss 1.4520 Accuracy 0.6799 Epoch 19 Batch 200 Loss 1.4604 Accuracy 0.6782 Epoch 19 Batch 250 Loss 1.4606 Accuracy 0.6783 Epoch 19 Batch 300 Loss 1.4627 Accuracy 0.6783 Epoch 19 Batch 350 Loss 1.4664 Accuracy 0.6777 Epoch 19 Batch 400 Loss 1.4720 Accuracy 0.6769 Epoch 19 Batch 450 Loss 1.4742 Accuracy 0.6764 Epoch 19 Batch 500 Loss 1.4772 Accuracy 0.6760 Epoch 19 Batch 550 Loss 1.4784 Accuracy 0.6759 Epoch 19 Batch 600 Loss 1.4807 Accuracy 0.6756 Epoch 19 Batch 650 Loss 1.4846 Accuracy 0.6750 Epoch 19 Batch 700 Loss 1.4877 Accuracy 0.6747 Epoch 19 Batch 750 Loss 1.4890 Accuracy 0.6745 Epoch 19 Batch 800 Loss 1.4918 Accuracy 0.6741 Epoch 19 Loss 1.4924 Accuracy 0.6740 Time taken for 1 epoch: 45.24 secs Epoch 20 Batch 0 Loss 1.3994 Accuracy 0.6883 Epoch 20 Batch 50 Loss 1.3894 Accuracy 0.6911 Epoch 20 Batch 100 Loss 1.4050 Accuracy 0.6889 Epoch 20 Batch 150 Loss 1.4108 Accuracy 0.6883 Epoch 20 Batch 200 Loss 1.4111 Accuracy 0.6876 Epoch 20 Batch 250 Loss 1.4121 Accuracy 0.6871 Epoch 20 Batch 300 Loss 1.4179 Accuracy 0.6859 Epoch 20 Batch 350 Loss 1.4182 Accuracy 0.6857 Epoch 20 Batch 400 Loss 1.4212 Accuracy 0.6851 Epoch 20 Batch 450 Loss 1.4282 Accuracy 0.6837 Epoch 20 Batch 500 Loss 1.4296 Accuracy 0.6833 Epoch 20 Batch 550 Loss 1.4343 Accuracy 0.6826 Epoch 20 Batch 600 Loss 1.4375 Accuracy 0.6822 Epoch 20 Batch 650 Loss 1.4413 Accuracy 0.6817 Epoch 20 Batch 700 Loss 1.4464 Accuracy 0.6809 Epoch 20 Batch 750 Loss 1.4491 Accuracy 0.6805 Epoch 20 Batch 800 Loss 1.4530 Accuracy 0.6799 Saving checkpoint for epoch 20 at ./checkpoints/train/ckpt-4 Epoch 20 Loss 1.4533 Accuracy 0.6799 Time taken for 1 epoch: 45.84 secs
הפעל מסקנות
השלבים הבאים משמשים להסקת מסקנות:
- מקודד את משפט הקלט באמצעות הטוקנייזר הפורטוגזי (
tokenizers.pt). זהו קלט המקודד. - כניסת המפענח מאותחלת לאסימון
[START]. - חשב את מסכות הריפוד ואת מסכות ההסתכלות קדימה.
- לאחר מכן
decoderמוציא את התחזיות על ידי התבוננותencoder outputשלו (תשומת לב עצמית). - שרשור את האסימון החזוי לקלט המפענח והעביר אותו למפענח.
- בגישה זו, המפענח חוזה את האסימון הבא על סמך האסימונים הקודמים שהוא חזה.
class Translator(tf.Module):
def __init__(self, tokenizers, transformer):
self.tokenizers = tokenizers
self.transformer = transformer
def __call__(self, sentence, max_length=20):
# input sentence is portuguese, hence adding the start and end token
assert isinstance(sentence, tf.Tensor)
if len(sentence.shape) == 0:
sentence = sentence[tf.newaxis]
sentence = self.tokenizers.pt.tokenize(sentence).to_tensor()
encoder_input = sentence
# as the target is english, the first token to the transformer should be the
# english start token.
start_end = self.tokenizers.en.tokenize([''])[0]
start = start_end[0][tf.newaxis]
end = start_end[1][tf.newaxis]
# `tf.TensorArray` is required here (instead of a python list) so that the
# dynamic-loop can be traced by `tf.function`.
output_array = tf.TensorArray(dtype=tf.int64, size=0, dynamic_size=True)
output_array = output_array.write(0, start)
for i in tf.range(max_length):
output = tf.transpose(output_array.stack())
predictions, _ = self.transformer([encoder_input, output], training=False)
# select the last token from the seq_len dimension
predictions = predictions[:, -1:, :] # (batch_size, 1, vocab_size)
predicted_id = tf.argmax(predictions, axis=-1)
# concatentate the predicted_id to the output which is given to the decoder
# as its input.
output_array = output_array.write(i+1, predicted_id[0])
if predicted_id == end:
break
output = tf.transpose(output_array.stack())
# output.shape (1, tokens)
text = tokenizers.en.detokenize(output)[0] # shape: ()
tokens = tokenizers.en.lookup(output)[0]
# `tf.function` prevents us from using the attention_weights that were
# calculated on the last iteration of the loop. So recalculate them outside
# the loop.
_, attention_weights = self.transformer([encoder_input, output[:,:-1]], training=False)
return text, tokens, attention_weights
צור מופע של כיתת Translator זו, ונסה אותו כמה פעמים:
translator = Translator(tokenizers, transformer)
def print_translation(sentence, tokens, ground_truth):
print(f'{"Input:":15s}: {sentence}')
print(f'{"Prediction":15s}: {tokens.numpy().decode("utf-8")}')
print(f'{"Ground truth":15s}: {ground_truth}')
sentence = "este é um problema que temos que resolver."
ground_truth = "this is a problem we have to solve ."
translated_text, translated_tokens, attention_weights = translator(
tf.constant(sentence))
print_translation(sentence, translated_text, ground_truth)
Input: : este é um problema que temos que resolver. Prediction : this is a problem that we have to solve . Ground truth : this is a problem we have to solve .
sentence = "os meus vizinhos ouviram sobre esta ideia."
ground_truth = "and my neighboring homes heard about this idea ."
translated_text, translated_tokens, attention_weights = translator(
tf.constant(sentence))
print_translation(sentence, translated_text, ground_truth)
Input: : os meus vizinhos ouviram sobre esta ideia. Prediction : my neighbors heard about this idea . Ground truth : and my neighboring homes heard about this idea .
sentence = "vou então muito rapidamente partilhar convosco algumas histórias de algumas coisas mágicas que aconteceram."
ground_truth = "so i \'ll just share with you some stories very quickly of some magical things that have happened ."
translated_text, translated_tokens, attention_weights = translator(
tf.constant(sentence))
print_translation(sentence, translated_text, ground_truth)
Input: : vou então muito rapidamente partilhar convosco algumas histórias de algumas coisas mágicas que aconteceram. Prediction : so i ' m going to share with you a few stories of some magic things that have happened . Ground truth : so i 'll just share with you some stories very quickly of some magical things that have happened .
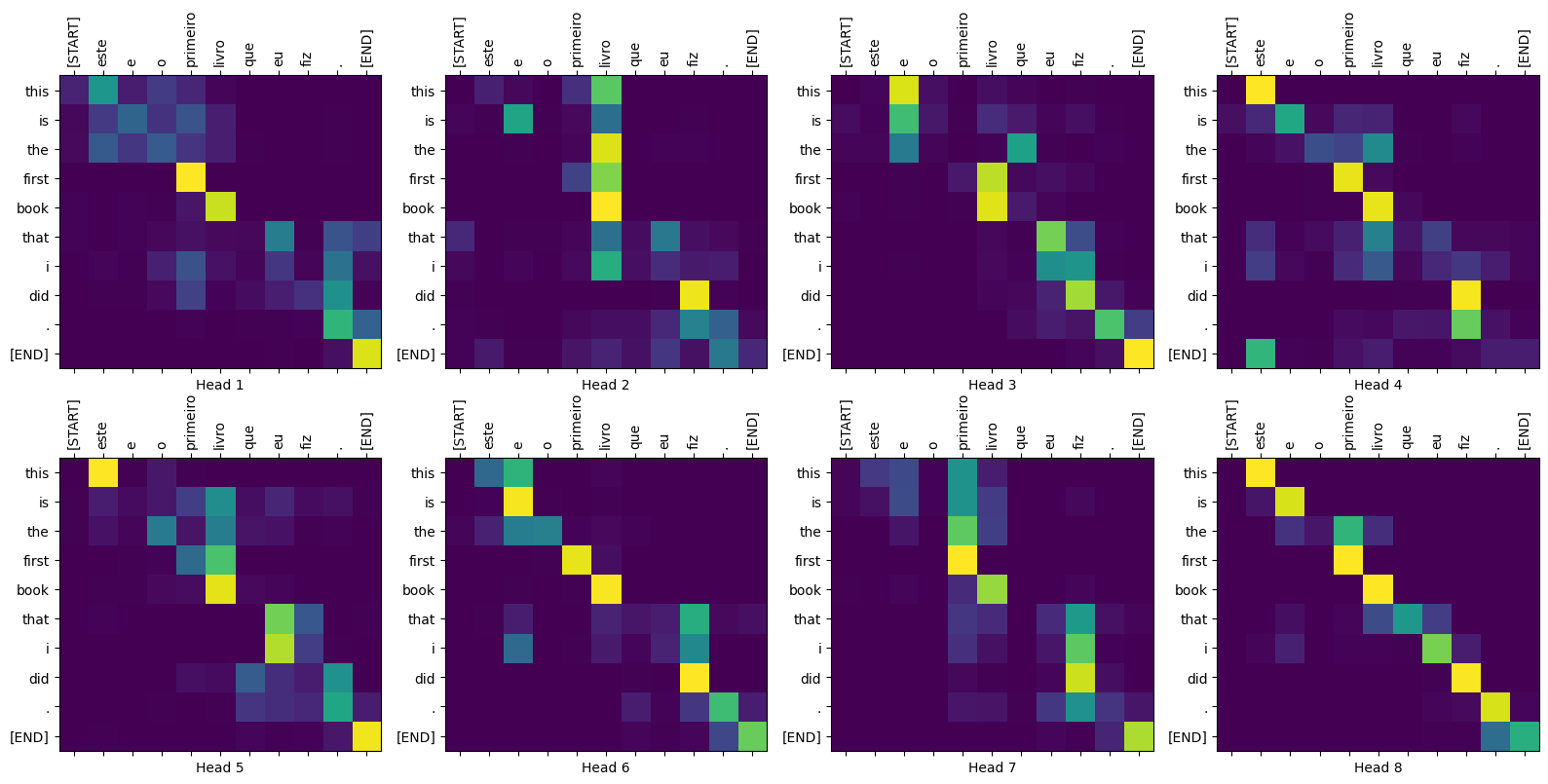
עלילות תשומת לב
כיתת Translator מחזירה מילון של מפות קשב שבהן תוכלו להשתמש כדי לדמיין את העבודה הפנימית של המודל:
sentence = "este é o primeiro livro que eu fiz."
ground_truth = "this is the first book i've ever done."
translated_text, translated_tokens, attention_weights = translator(
tf.constant(sentence))
print_translation(sentence, translated_text, ground_truth)
Input: : este é o primeiro livro que eu fiz. Prediction : this is the first book that i did . Ground truth : this is the first book i've ever done.
def plot_attention_head(in_tokens, translated_tokens, attention):
# The plot is of the attention when a token was generated.
# The model didn't generate `<START>` in the output. Skip it.
translated_tokens = translated_tokens[1:]
ax = plt.gca()
ax.matshow(attention)
ax.set_xticks(range(len(in_tokens)))
ax.set_yticks(range(len(translated_tokens)))
labels = [label.decode('utf-8') for label in in_tokens.numpy()]
ax.set_xticklabels(
labels, rotation=90)
labels = [label.decode('utf-8') for label in translated_tokens.numpy()]
ax.set_yticklabels(labels)
head = 0
# shape: (batch=1, num_heads, seq_len_q, seq_len_k)
attention_heads = tf.squeeze(
attention_weights['decoder_layer4_block2'], 0)
attention = attention_heads[head]
attention.shape
TensorShape([10, 11])
in_tokens = tf.convert_to_tensor([sentence])
in_tokens = tokenizers.pt.tokenize(in_tokens).to_tensor()
in_tokens = tokenizers.pt.lookup(in_tokens)[0]
in_tokens
<tf.Tensor: shape=(11,), dtype=string, numpy=
array([b'[START]', b'este', b'e', b'o', b'primeiro', b'livro', b'que',
b'eu', b'fiz', b'.', b'[END]'], dtype=object)>
translated_tokens
<tf.Tensor: shape=(11,), dtype=string, numpy=
array([b'[START]', b'this', b'is', b'the', b'first', b'book', b'that',
b'i', b'did', b'.', b'[END]'], dtype=object)>
plot_attention_head(in_tokens, translated_tokens, attention)

def plot_attention_weights(sentence, translated_tokens, attention_heads):
in_tokens = tf.convert_to_tensor([sentence])
in_tokens = tokenizers.pt.tokenize(in_tokens).to_tensor()
in_tokens = tokenizers.pt.lookup(in_tokens)[0]
in_tokens
fig = plt.figure(figsize=(16, 8))
for h, head in enumerate(attention_heads):
ax = fig.add_subplot(2, 4, h+1)
plot_attention_head(in_tokens, translated_tokens, head)
ax.set_xlabel(f'Head {h+1}')
plt.tight_layout()
plt.show()
plot_attention_weights(sentence, translated_tokens,
attention_weights['decoder_layer4_block2'][0])

הדגם בסדר על מילים לא מוכרות. לא "טריצרטופס" או "אנציקלופדיה" נמצאים במערך הנתונים של הקלט והמודל כמעט לומד לתעתיק אותם, אפילו ללא אוצר מילים משותף:
sentence = "Eu li sobre triceratops na enciclopédia."
ground_truth = "I read about triceratops in the encyclopedia."
translated_text, translated_tokens, attention_weights = translator(
tf.constant(sentence))
print_translation(sentence, translated_text, ground_truth)
plot_attention_weights(sentence, translated_tokens,
attention_weights['decoder_layer4_block2'][0])
Input: : Eu li sobre triceratops na enciclopédia. Prediction : i read about trigatotys in the encyclopedia . Ground truth : I read about triceratops in the encyclopedia.

יְצוּא
מודל ההסקה הזה עובד, אז בשלב הבא תייצא אותו כ- tf.saved_model .
כדי לעשות זאת, עטפו אותו בתת-מחלקה נוספת tf.Module , הפעם עם tf.function בשיטת __call__ :
class ExportTranslator(tf.Module):
def __init__(self, translator):
self.translator = translator
@tf.function(input_signature=[tf.TensorSpec(shape=[], dtype=tf.string)])
def __call__(self, sentence):
(result,
tokens,
attention_weights) = self.translator(sentence, max_length=100)
return result
ב- tf.function לעיל מוחזר רק משפט הפלט. הודות לביצוע הלא קפדני ב- tf.function , ערכים מיותרים לעולם אינם מחושבים.
translator = ExportTranslator(translator)
מכיוון שהמודל מפענח את התחזיות באמצעות tf.argmax , התחזיות הן דטרמיניסטיות. הדגם המקורי ואחד שנטען מחדש מה- SavedModel שלו אמורים לתת תחזיות זהות:
translator("este é o primeiro livro que eu fiz.").numpy()
b'this is the first book that i did .'
tf.saved_model.save(translator, export_dir='translator')
2022-02-04 13:19:17.308292: W tensorflow/python/util/util.cc:368] Sets are not currently considered sequences, but this may change in the future, so consider avoiding using them. WARNING:absl:Found untraced functions such as embedding_4_layer_call_fn, embedding_4_layer_call_and_return_conditional_losses, dropout_37_layer_call_fn, dropout_37_layer_call_and_return_conditional_losses, embedding_5_layer_call_fn while saving (showing 5 of 224). These functions will not be directly callable after loading.
reloaded = tf.saved_model.load('translator')
reloaded("este é o primeiro livro que eu fiz.").numpy()
b'this is the first book that i did .'
סיכום
במדריך זה למדת על קידוד מיקום, תשומת לב מרובה ראשים, החשיבות של מיסוך וכיצד ליצור שנאי.
נסה להשתמש במערך נתונים אחר כדי לאמן את השנאי. אתה יכול גם ליצור את שנאי הבסיס או שנאי XL על ידי שינוי הפרמטרים שלמעלה. אתה יכול גם להשתמש בשכבות המוגדרות כאן כדי ליצור BERT ולהכשיר מודלים מתקדמים. יתר על כן, אתה יכול ליישם חיפוש קרן כדי לקבל תחזיות טובות יותר.