
| | |  Wyświetl źródło na GitHub Wyświetl źródło na GitHub |
Ten samouczek szkoli model Transformer do tłumaczenia zestawu danych z języka portugalskiego na angielski . To zaawansowany przykład, który zakłada znajomość generowania tekstu i uwagi .
Podstawową ideą modelu Transformera jest samouważność — umiejętność zajmowania się różnymi pozycjami sekwencji wejściowej w celu obliczenia reprezentacji tej sekwencji. Transformer tworzy stosy warstw samouważności i jest wyjaśnione poniżej w sekcjach Uwaga produktu skalowanego i Uwaga wielogłowa .
Model transformatora obsługuje dane wejściowe o zmiennej wielkości przy użyciu stosów warstw samouwagi zamiast RNN lub CNN . Ta ogólna architektura ma wiele zalet:
- Nie przyjmuje żadnych założeń dotyczących relacji czasowych/przestrzennych w danych. Jest to idealne rozwiązanie do przetwarzania zestawu obiektów (na przykład jednostek StarCraft ).
- Wyjścia warstw mogą być obliczane równolegle, zamiast szeregów, takich jak RNN.
- Odległe elementy mogą wpływać na swoje wyniki bez przechodzenia przez wiele kroków RNN lub warstw splotu (zobacz na przykład Transformator pamięci sceny ).
- Może uczyć się zależności dalekiego zasięgu. Jest to wyzwanie w wielu zadaniach sekwencyjnych.
Wady tej architektury to:
- W przypadku szeregu czasowego dane wyjściowe dla kroku czasowego są obliczane na podstawie całej historii, a nie tylko danych wejściowych i bieżącego stanu ukrytego. Może to być mniej wydajne.
- Jeśli dane wejściowe mają relację czasową/przestrzenną, taką jak tekst, należy dodać pewne kodowanie pozycyjne, w przeciwnym razie model będzie skutecznie widział worek słów.
Po przeszkoleniu modelu w tym notatniku będziesz mógł wprowadzić zdanie w języku portugalskim i zwrócić tłumaczenie na język angielski.
Ustawiać
pip install tensorflow_datasetspip install -U tensorflow-text
import collections
import logging
import os
import pathlib
import re
import string
import sys
import time
import numpy as np
import matplotlib.pyplot as plt
import tensorflow_datasets as tfds
import tensorflow_text as text
import tensorflow as tf
logging.getLogger('tensorflow').setLevel(logging.ERROR) # suppress warnings
Pobierz zbiór danych
Użyj zestawów danych TensorFlow , aby załadować zestaw danych do tłumaczenia portugalsko-angielskiego z projektu TED Talks Open Translation Project .
Ten zestaw danych zawiera około 50000 przykładów uczących, 1100 przykładów walidacji i 2000 przykładów testowych.
examples, metadata = tfds.load('ted_hrlr_translate/pt_to_en', with_info=True,
as_supervised=True)
train_examples, val_examples = examples['train'], examples['validation']
Obiekt tf.data.Dataset zwrócony przez zestawy danych TensorFlow daje pary przykładów tekstowych:
for pt_examples, en_examples in train_examples.batch(3).take(1):
for pt in pt_examples.numpy():
print(pt.decode('utf-8'))
print()
for en in en_examples.numpy():
print(en.decode('utf-8'))
e quando melhoramos a procura , tiramos a única vantagem da impressão , que é a serendipidade . mas e se estes fatores fossem ativos ? mas eles não tinham a curiosidade de me testar . and when you improve searchability , you actually take away the one advantage of print , which is serendipity . but what if it were active ? but they did n't test for curiosity .
Tokenizacja i detokenizacja tekstu
Nie możesz trenować modelu bezpośrednio na tekście. Tekst należy najpierw przekonwertować na jakąś reprezentację liczbową. Zazwyczaj tekst jest konwertowany na sekwencje identyfikatorów tokenów, które są używane jako indeksy do osadzania.
Jedna popularna implementacja jest pokazana w samouczku Subword tokenizer buduje tokenizery subword ( text.BertTokenizer ) zoptymalizowane dla tego zestawu danych i eksportuje je w modelu save_model .
Pobierz i rozpakuj oraz zaimportuj saved_model :
model_name = "ted_hrlr_translate_pt_en_converter"
tf.keras.utils.get_file(
f"{model_name}.zip",
f"https://storage.googleapis.com/download.tensorflow.org/models/{model_name}.zip",
cache_dir='.', cache_subdir='', extract=True
)
Downloading data from https://storage.googleapis.com/download.tensorflow.org/models/ted_hrlr_translate_pt_en_converter.zip 188416/184801 [==============================] - 0s 0us/step 196608/184801 [===============================] - 0s 0us/step './ted_hrlr_translate_pt_en_converter.zip'
tokenizers = tf.saved_model.load(model_name)
tf.saved_model zawiera dwa tokenizatory tekstu, jeden dla języka angielskiego i jeden dla języka portugalskiego. Oba mają te same metody:
[item for item in dir(tokenizers.en) if not item.startswith('_')]
['detokenize', 'get_reserved_tokens', 'get_vocab_path', 'get_vocab_size', 'lookup', 'tokenize', 'tokenizer', 'vocab']
Metoda tokenize konwertuje partię ciągów na dopełnioną partię identyfikatorów tokenów. Ta metoda dzieli interpunkcję, małe litery i unicode - normalizuje dane wejściowe przed tokenizacją. Ta standaryzacja nie jest tutaj widoczna, ponieważ dane wejściowe są już ustandaryzowane.
for en in en_examples.numpy():
print(en.decode('utf-8'))
and when you improve searchability , you actually take away the one advantage of print , which is serendipity . but what if it were active ? but they did n't test for curiosity .
encoded = tokenizers.en.tokenize(en_examples)
for row in encoded.to_list():
print(row)
[2, 72, 117, 79, 1259, 1491, 2362, 13, 79, 150, 184, 311, 71, 103, 2308, 74, 2679, 13, 148, 80, 55, 4840, 1434, 2423, 540, 15, 3] [2, 87, 90, 107, 76, 129, 1852, 30, 3] [2, 87, 83, 149, 50, 9, 56, 664, 85, 2512, 15, 3]
Metoda detokenize próbuje przekonwertować te identyfikatory tokenów z powrotem na tekst czytelny dla człowieka:
round_trip = tokenizers.en.detokenize(encoded)
for line in round_trip.numpy():
print(line.decode('utf-8'))
and when you improve searchability , you actually take away the one advantage of print , which is serendipity . but what if it were active ? but they did n ' t test for curiosity .
Metoda lookup niższego poziomu konwertuje identyfikatory tokenów na tekst tokenów:
tokens = tokenizers.en.lookup(encoded)
tokens
<tf.RaggedTensor [[b'[START]', b'and', b'when', b'you', b'improve', b'search', b'##ability', b',', b'you', b'actually', b'take', b'away', b'the', b'one', b'advantage', b'of', b'print', b',', b'which', b'is', b's', b'##ere', b'##nd', b'##ip', b'##ity', b'.', b'[END]'] , [b'[START]', b'but', b'what', b'if', b'it', b'were', b'active', b'?', b'[END]'] , [b'[START]', b'but', b'they', b'did', b'n', b"'", b't', b'test', b'for', b'curiosity', b'.', b'[END]'] ]>
Tutaj możesz zobaczyć aspekt „podsłowa” tokenizatorów. Słowo „przeszukiwalność” jest rozkładane na „wyszukiwać ##ability”, a słowo „serendipity” na „s ##ere ##nd ##ip ##ity”
Konfiguracja potoku wejściowego
Aby zbudować potok wejściowy odpowiedni do trenowania, zastosujesz pewne przekształcenia do zestawu danych.
Ta funkcja będzie używana do kodowania partii nieprzetworzonego tekstu:
def tokenize_pairs(pt, en):
pt = tokenizers.pt.tokenize(pt)
# Convert from ragged to dense, padding with zeros.
pt = pt.to_tensor()
en = tokenizers.en.tokenize(en)
# Convert from ragged to dense, padding with zeros.
en = en.to_tensor()
return pt, en
Oto prosty potok wejściowy, który przetwarza, tasuje i grupuje dane:
BUFFER_SIZE = 20000
BATCH_SIZE = 64
def make_batches(ds):
return (
ds
.cache()
.shuffle(BUFFER_SIZE)
.batch(BATCH_SIZE)
.map(tokenize_pairs, num_parallel_calls=tf.data.AUTOTUNE)
.prefetch(tf.data.AUTOTUNE))
train_batches = make_batches(train_examples)
val_batches = make_batches(val_examples)
Kodowanie pozycyjne
Warstwy uwagi widzą swoje dane wejściowe jako zbiór wektorów, bez kolejności sekwencyjnej. Ten model również nie zawiera żadnych powtarzających się ani splotowych warstw. Z tego powodu dodaje się "kodowanie pozycyjne", aby dać modelowi pewne informacje o względnej pozycji tokenów w zdaniu.
Wektor kodowania pozycyjnego jest dodawany do wektora osadzania. Osadzenia reprezentują token w przestrzeni d-wymiarowej, w której tokeny o podobnym znaczeniu będą bliżej siebie. Ale osadzenia nie kodują względnej pozycji tokenów w zdaniu. Czyli po dodaniu kodowania pozycyjnego, tokeny będą bliżej siebie na podstawie podobieństwa ich znaczenia i ich pozycji w zdaniu , w przestrzeni d-wymiarowej.
Wzór na obliczenie kodowania pozycyjnego jest następujący:
\[\Large{PE_{(pos, 2i)} = \sin(pos / 10000^{2i / d_{model} })} \]
\[\Large{PE_{(pos, 2i+1)} = \cos(pos / 10000^{2i / d_{model} })} \]
def get_angles(pos, i, d_model):
angle_rates = 1 / np.power(10000, (2 * (i//2)) / np.float32(d_model))
return pos * angle_rates
def positional_encoding(position, d_model):
angle_rads = get_angles(np.arange(position)[:, np.newaxis],
np.arange(d_model)[np.newaxis, :],
d_model)
# apply sin to even indices in the array; 2i
angle_rads[:, 0::2] = np.sin(angle_rads[:, 0::2])
# apply cos to odd indices in the array; 2i+1
angle_rads[:, 1::2] = np.cos(angle_rads[:, 1::2])
pos_encoding = angle_rads[np.newaxis, ...]
return tf.cast(pos_encoding, dtype=tf.float32)
n, d = 2048, 512
pos_encoding = positional_encoding(n, d)
print(pos_encoding.shape)
pos_encoding = pos_encoding[0]
# Juggle the dimensions for the plot
pos_encoding = tf.reshape(pos_encoding, (n, d//2, 2))
pos_encoding = tf.transpose(pos_encoding, (2, 1, 0))
pos_encoding = tf.reshape(pos_encoding, (d, n))
plt.pcolormesh(pos_encoding, cmap='RdBu')
plt.ylabel('Depth')
plt.xlabel('Position')
plt.colorbar()
plt.show()
(1, 2048, 512)

Maskowanie
Maskuj wszystkie żetony padów w partii sekwencji. Zapewnia to, że model nie traktuje dopełnienia jako danych wejściowych. Maska wskazuje, gdzie występuje wartość 0 padu: wyprowadza 1 w tych lokalizacjach, a 0 w przeciwnym razie.
def create_padding_mask(seq):
seq = tf.cast(tf.math.equal(seq, 0), tf.float32)
# add extra dimensions to add the padding
# to the attention logits.
return seq[:, tf.newaxis, tf.newaxis, :] # (batch_size, 1, 1, seq_len)
x = tf.constant([[7, 6, 0, 0, 1], [1, 2, 3, 0, 0], [0, 0, 0, 4, 5]])
create_padding_mask(x)
<tf.Tensor: shape=(3, 1, 1, 5), dtype=float32, numpy=
array([[[[0., 0., 1., 1., 0.]]],
[[[0., 0., 0., 1., 1.]]],
[[[1., 1., 1., 0., 0.]]]], dtype=float32)>
Maska look-ahead służy do maskowania przyszłych tokenów w sekwencji. Innymi słowy maska wskazuje, których wpisów nie należy używać.
Oznacza to, że do przewidzenia trzeciego tokena zostanie użyty tylko pierwszy i drugi token. Podobnie jak w przypadku przewidywania czwartego żetonu, wykorzystany zostanie tylko pierwszy, drugi i trzeci żeton i tak dalej.
def create_look_ahead_mask(size):
mask = 1 - tf.linalg.band_part(tf.ones((size, size)), -1, 0)
return mask # (seq_len, seq_len)
x = tf.random.uniform((1, 3))
temp = create_look_ahead_mask(x.shape[1])
temp
<tf.Tensor: shape=(3, 3), dtype=float32, numpy=
array([[0., 1., 1.],
[0., 0., 1.],
[0., 0., 0.]], dtype=float32)>
Skalowana uwaga produktu w kropki
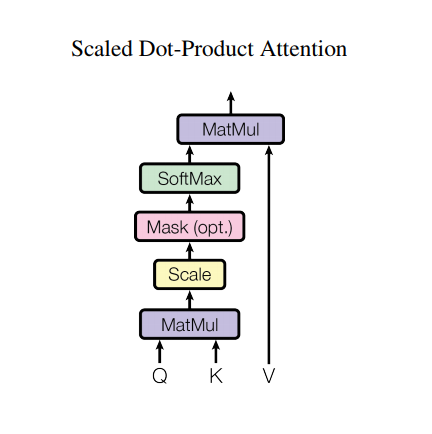
Funkcja uwagi używana przez transformator przyjmuje trzy wejścia: Q (zapytanie), K (klucz), V (wartość). Równanie używane do obliczania wag uwagi to:
\[\Large{Attention(Q, K, V) = softmax_k\left(\frac{QK^T}{\sqrt{d_k} }\right) V} \]
Uwaga iloczynu skalarnego jest skalowana przez pierwiastek kwadratowy głębokości. Dzieje się tak, ponieważ dla dużych wartości głębokości iloczyn skalarny rośnie do dużych rozmiarów, przesuwając funkcję softmax, gdzie ma małe gradienty, co skutkuje bardzo twardym softmaxem.
Załóżmy na przykład, że Q i K mają średnią 0 i wariancję 1. Ich mnożenie macierzy będzie miało średnią 0 i wariancję dk . Zatem pierwiastek kwadratowy z dk jest używany do skalowania, więc otrzymujesz stałą wariancję niezależnie od wartości dk . Jeśli wariancja jest zbyt niska, wynik może być zbyt płaski, aby skutecznie optymalizować. Jeśli wariancja jest zbyt duża, softmax może nasycić się podczas inicjalizacji, co utrudnia naukę.
Maska jest mnożona przez -1e9 (blisko ujemnej nieskończoności). Dzieje się tak, ponieważ maska jest sumowana z przeskalowanym mnożeniem macierzy Q i K i jest stosowana bezpośrednio przed softmaxem. Celem jest wyzerowanie tych komórek, a duże ujemne dane wejściowe do softmaxu są bliskie zeru na wyjściu.
def scaled_dot_product_attention(q, k, v, mask):
"""Calculate the attention weights.
q, k, v must have matching leading dimensions.
k, v must have matching penultimate dimension, i.e.: seq_len_k = seq_len_v.
The mask has different shapes depending on its type(padding or look ahead)
but it must be broadcastable for addition.
Args:
q: query shape == (..., seq_len_q, depth)
k: key shape == (..., seq_len_k, depth)
v: value shape == (..., seq_len_v, depth_v)
mask: Float tensor with shape broadcastable
to (..., seq_len_q, seq_len_k). Defaults to None.
Returns:
output, attention_weights
"""
matmul_qk = tf.matmul(q, k, transpose_b=True) # (..., seq_len_q, seq_len_k)
# scale matmul_qk
dk = tf.cast(tf.shape(k)[-1], tf.float32)
scaled_attention_logits = matmul_qk / tf.math.sqrt(dk)
# add the mask to the scaled tensor.
if mask is not None:
scaled_attention_logits += (mask * -1e9)
# softmax is normalized on the last axis (seq_len_k) so that the scores
# add up to 1.
attention_weights = tf.nn.softmax(scaled_attention_logits, axis=-1) # (..., seq_len_q, seq_len_k)
output = tf.matmul(attention_weights, v) # (..., seq_len_q, depth_v)
return output, attention_weights
Ponieważ normalizacja softmax jest wykonywana na K, jej wartości decydują o znaczeniu nadanym Q.
Wynik reprezentuje pomnożenie wag uwagi i wektora V (wartości). Gwarantuje to, że tokeny, na których chcesz się skupić, są przechowywane bez zmian, a nieistotne tokeny są usuwane.
def print_out(q, k, v):
temp_out, temp_attn = scaled_dot_product_attention(
q, k, v, None)
print('Attention weights are:')
print(temp_attn)
print('Output is:')
print(temp_out)
np.set_printoptions(suppress=True)
temp_k = tf.constant([[10, 0, 0],
[0, 10, 0],
[0, 0, 10],
[0, 0, 10]], dtype=tf.float32) # (4, 3)
temp_v = tf.constant([[1, 0],
[10, 0],
[100, 5],
[1000, 6]], dtype=tf.float32) # (4, 2)
# This `query` aligns with the second `key`,
# so the second `value` is returned.
temp_q = tf.constant([[0, 10, 0]], dtype=tf.float32) # (1, 3)
print_out(temp_q, temp_k, temp_v)
Attention weights are: tf.Tensor([[0. 1. 0. 0.]], shape=(1, 4), dtype=float32) Output is: tf.Tensor([[10. 0.]], shape=(1, 2), dtype=float32)
# This query aligns with a repeated key (third and fourth),
# so all associated values get averaged.
temp_q = tf.constant([[0, 0, 10]], dtype=tf.float32) # (1, 3)
print_out(temp_q, temp_k, temp_v)
Attention weights are: tf.Tensor([[0. 0. 0.5 0.5]], shape=(1, 4), dtype=float32) Output is: tf.Tensor([[550. 5.5]], shape=(1, 2), dtype=float32)
# This query aligns equally with the first and second key,
# so their values get averaged.
temp_q = tf.constant([[10, 10, 0]], dtype=tf.float32) # (1, 3)
print_out(temp_q, temp_k, temp_v)
Attention weights are: tf.Tensor([[0.5 0.5 0. 0. ]], shape=(1, 4), dtype=float32) Output is: tf.Tensor([[5.5 0. ]], shape=(1, 2), dtype=float32)
Przekaż wszystkie zapytania razem.
temp_q = tf.constant([[0, 0, 10],
[0, 10, 0],
[10, 10, 0]], dtype=tf.float32) # (3, 3)
print_out(temp_q, temp_k, temp_v)
Attention weights are: tf.Tensor( [[0. 0. 0.5 0.5] [0. 1. 0. 0. ] [0.5 0.5 0. 0. ]], shape=(3, 4), dtype=float32) Output is: tf.Tensor( [[550. 5.5] [ 10. 0. ] [ 5.5 0. ]], shape=(3, 2), dtype=float32)
Wielogłowa uwaga
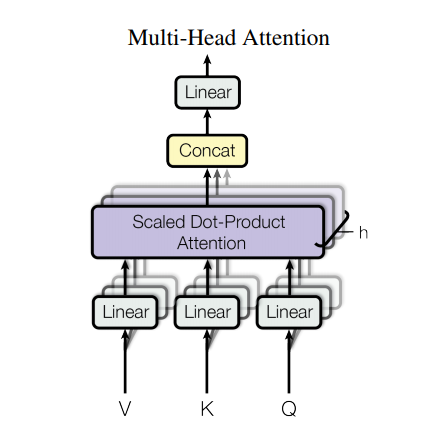
Uwaga wielogłowa składa się z czterech części:
- Warstwy liniowe.
- Skalowana uwaga iloczynu skalarnego.
- Końcowa warstwa liniowa.
Każdy wielogłowicowy blok uwagi otrzymuje trzy dane wejściowe; Q (zapytanie), K (klucz), V (wartość). Są one przepuszczane przez liniowe (gęste) warstwy przed funkcją wielogłowej uwagi.
Na powyższym diagramie (K,Q,V) przechodzą przez oddzielne liniowe ( Dense ) warstwy dla każdej głowy uwagi. Dla uproszczenia/wydajności poniższy kod implementuje to przy użyciu pojedynczej gęstej warstwy z num_heads razy większą liczbą wyjść. Dane wyjściowe są zmieniane na kształt (batch, num_heads, ...) przed zastosowaniem funkcji uwagi.
Zdefiniowana powyżej funkcja scaled_dot_product_attention jest stosowana w pojedynczym wywołaniu, rozgłaszanym w celu zwiększenia wydajności. Na etapie uwagi należy zastosować odpowiednią maskę. Dane wyjściowe uwagi dla każdej głowy są następnie łączone (za pomocą tf.transpose i tf.reshape ) i przepuszczane przez ostatnią warstwę Dense .
Zamiast jednej głowicy uwagi, Q, K i V są podzielone na wiele głowic, ponieważ pozwala to modelowi na wspólne zajmowanie się informacjami z różnych podprzestrzeni reprezentacji w różnych pozycjach. Po podziale każda głowica ma zmniejszoną wymiarowość, więc całkowity koszt obliczeń jest taki sam, jak w przypadku pojedynczej głowicy z pełną wymiarowością.
class MultiHeadAttention(tf.keras.layers.Layer):
def __init__(self, d_model, num_heads):
super(MultiHeadAttention, self).__init__()
self.num_heads = num_heads
self.d_model = d_model
assert d_model % self.num_heads == 0
self.depth = d_model // self.num_heads
self.wq = tf.keras.layers.Dense(d_model)
self.wk = tf.keras.layers.Dense(d_model)
self.wv = tf.keras.layers.Dense(d_model)
self.dense = tf.keras.layers.Dense(d_model)
def split_heads(self, x, batch_size):
"""Split the last dimension into (num_heads, depth).
Transpose the result such that the shape is (batch_size, num_heads, seq_len, depth)
"""
x = tf.reshape(x, (batch_size, -1, self.num_heads, self.depth))
return tf.transpose(x, perm=[0, 2, 1, 3])
def call(self, v, k, q, mask):
batch_size = tf.shape(q)[0]
q = self.wq(q) # (batch_size, seq_len, d_model)
k = self.wk(k) # (batch_size, seq_len, d_model)
v = self.wv(v) # (batch_size, seq_len, d_model)
q = self.split_heads(q, batch_size) # (batch_size, num_heads, seq_len_q, depth)
k = self.split_heads(k, batch_size) # (batch_size, num_heads, seq_len_k, depth)
v = self.split_heads(v, batch_size) # (batch_size, num_heads, seq_len_v, depth)
# scaled_attention.shape == (batch_size, num_heads, seq_len_q, depth)
# attention_weights.shape == (batch_size, num_heads, seq_len_q, seq_len_k)
scaled_attention, attention_weights = scaled_dot_product_attention(
q, k, v, mask)
scaled_attention = tf.transpose(scaled_attention, perm=[0, 2, 1, 3]) # (batch_size, seq_len_q, num_heads, depth)
concat_attention = tf.reshape(scaled_attention,
(batch_size, -1, self.d_model)) # (batch_size, seq_len_q, d_model)
output = self.dense(concat_attention) # (batch_size, seq_len_q, d_model)
return output, attention_weights
Utwórz warstwę MultiHeadAttention , aby wypróbować. W każdej lokalizacji w sekwencji, y , MultiHeadAttention uruchamia wszystkie 8 głowic uwagi we wszystkich innych lokalizacjach w sekwencji, zwracając nowy wektor o tej samej długości w każdej lokalizacji.
temp_mha = MultiHeadAttention(d_model=512, num_heads=8)
y = tf.random.uniform((1, 60, 512)) # (batch_size, encoder_sequence, d_model)
out, attn = temp_mha(y, k=y, q=y, mask=None)
out.shape, attn.shape
(TensorShape([1, 60, 512]), TensorShape([1, 8, 60, 60]))
Punktowa sieć feed forward
Sieć ze sprzężeniem do przodu składa się z dwóch w pełni połączonych warstw z aktywacją ReLU pomiędzy nimi.
def point_wise_feed_forward_network(d_model, dff):
return tf.keras.Sequential([
tf.keras.layers.Dense(dff, activation='relu'), # (batch_size, seq_len, dff)
tf.keras.layers.Dense(d_model) # (batch_size, seq_len, d_model)
])
sample_ffn = point_wise_feed_forward_network(512, 2048)
sample_ffn(tf.random.uniform((64, 50, 512))).shape
TensorShape([64, 50, 512])
Koder i dekoder
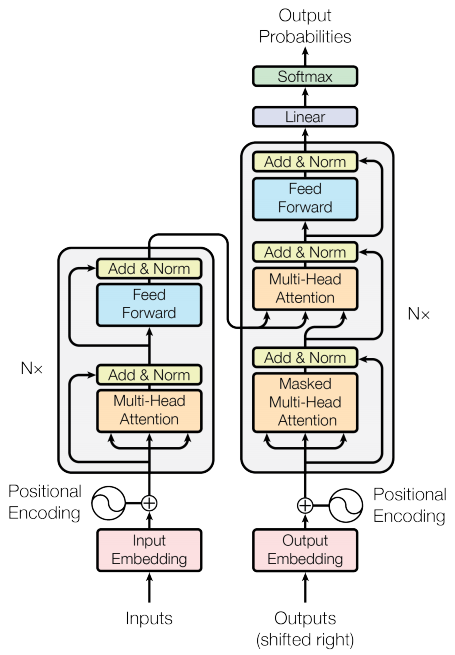
Model transformatora jest zgodny z tym samym ogólnym wzorcem, co standardowa sekwencja sekwencji z modelem uwagi .
- Zdanie wejściowe jest przekazywane przez
Nwarstw kodera, które generują dane wyjściowe dla każdego tokena w sekwencji. - Dekoder uwzględnia dane wyjściowe enkodera i własne dane wejściowe (samouwagę), aby przewidzieć następne słowo.
Warstwa kodera
Każda warstwa kodera składa się z podwarstw:
- Uwaga wielogłowa (z maską wyściółkową)
- Punkty mądre sieci feed-forward.
Każda z tych podwarstw ma wokół siebie szczątkowe połączenie, po którym następuje normalizacja warstwy. Połączenia resztkowe pomagają uniknąć problemu znikającego gradientu w głębokich sieciach.
Dane wyjściowe każdej podwarstwy to LayerNorm(x + Sublayer(x)) . Normalizacja odbywa się na osi d_model (ostatnia). W transformatorze jest N warstw kodera.
class EncoderLayer(tf.keras.layers.Layer):
def __init__(self, d_model, num_heads, dff, rate=0.1):
super(EncoderLayer, self).__init__()
self.mha = MultiHeadAttention(d_model, num_heads)
self.ffn = point_wise_feed_forward_network(d_model, dff)
self.layernorm1 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.layernorm2 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.dropout1 = tf.keras.layers.Dropout(rate)
self.dropout2 = tf.keras.layers.Dropout(rate)
def call(self, x, training, mask):
attn_output, _ = self.mha(x, x, x, mask) # (batch_size, input_seq_len, d_model)
attn_output = self.dropout1(attn_output, training=training)
out1 = self.layernorm1(x + attn_output) # (batch_size, input_seq_len, d_model)
ffn_output = self.ffn(out1) # (batch_size, input_seq_len, d_model)
ffn_output = self.dropout2(ffn_output, training=training)
out2 = self.layernorm2(out1 + ffn_output) # (batch_size, input_seq_len, d_model)
return out2
sample_encoder_layer = EncoderLayer(512, 8, 2048)
sample_encoder_layer_output = sample_encoder_layer(
tf.random.uniform((64, 43, 512)), False, None)
sample_encoder_layer_output.shape # (batch_size, input_seq_len, d_model)
TensorShape([64, 43, 512])
Warstwa dekodera
Każda warstwa dekodera składa się z podwarstw:
- Zamaskowana wielogłowa uwaga (z maską patrzenia w przód i maską dopełniającą)
- Uwaga wielogłowa (z maską wyściełającą). V (wartość) i K (klucz) odbierają wyjście enkodera jako wejścia. Q (zapytanie) otrzymuje dane wyjściowe z zamaskowanej wielogłowicowej podwarstwy uwagi.
- Punkty mądre sieci feed-forward
Każda z tych podwarstw ma wokół siebie szczątkowe połączenie, po którym następuje normalizacja warstwy. Dane wyjściowe każdej podwarstwy to LayerNorm(x + Sublayer(x)) . Normalizacja odbywa się na osi d_model (ostatnia).
W transformatorze jest N warstw dekodera.
Ponieważ Q odbiera dane wyjściowe z pierwszego bloku uwagi dekodera, a K odbiera dane wyjściowe kodera, wagi uwagi reprezentują znaczenie nadawane wejściu dekodera na podstawie danych wyjściowych kodera. Innymi słowy, dekoder przewiduje następny token, patrząc na wyjście kodera i samoobsługując się na własnym wyjściu. Zobacz powyższą demonstrację w sekcji uwagi dotyczącej produktu ze skalowaną kropką.
class DecoderLayer(tf.keras.layers.Layer):
def __init__(self, d_model, num_heads, dff, rate=0.1):
super(DecoderLayer, self).__init__()
self.mha1 = MultiHeadAttention(d_model, num_heads)
self.mha2 = MultiHeadAttention(d_model, num_heads)
self.ffn = point_wise_feed_forward_network(d_model, dff)
self.layernorm1 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.layernorm2 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.layernorm3 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.dropout1 = tf.keras.layers.Dropout(rate)
self.dropout2 = tf.keras.layers.Dropout(rate)
self.dropout3 = tf.keras.layers.Dropout(rate)
def call(self, x, enc_output, training,
look_ahead_mask, padding_mask):
# enc_output.shape == (batch_size, input_seq_len, d_model)
attn1, attn_weights_block1 = self.mha1(x, x, x, look_ahead_mask) # (batch_size, target_seq_len, d_model)
attn1 = self.dropout1(attn1, training=training)
out1 = self.layernorm1(attn1 + x)
attn2, attn_weights_block2 = self.mha2(
enc_output, enc_output, out1, padding_mask) # (batch_size, target_seq_len, d_model)
attn2 = self.dropout2(attn2, training=training)
out2 = self.layernorm2(attn2 + out1) # (batch_size, target_seq_len, d_model)
ffn_output = self.ffn(out2) # (batch_size, target_seq_len, d_model)
ffn_output = self.dropout3(ffn_output, training=training)
out3 = self.layernorm3(ffn_output + out2) # (batch_size, target_seq_len, d_model)
return out3, attn_weights_block1, attn_weights_block2
sample_decoder_layer = DecoderLayer(512, 8, 2048)
sample_decoder_layer_output, _, _ = sample_decoder_layer(
tf.random.uniform((64, 50, 512)), sample_encoder_layer_output,
False, None, None)
sample_decoder_layer_output.shape # (batch_size, target_seq_len, d_model)
TensorShape([64, 50, 512])
Koder
Encoder składa się z:
- Osadzanie danych wejściowych
- Kodowanie pozycyjne
- N warstw kodera
Wejście przechodzi przez osadzanie, które jest sumowane z kodowaniem pozycyjnym. Dane wyjściowe tego podsumowania są danymi wejściowymi do warstw kodera. Wyjście kodera jest wejściem do dekodera.
class Encoder(tf.keras.layers.Layer):
def __init__(self, num_layers, d_model, num_heads, dff, input_vocab_size,
maximum_position_encoding, rate=0.1):
super(Encoder, self).__init__()
self.d_model = d_model
self.num_layers = num_layers
self.embedding = tf.keras.layers.Embedding(input_vocab_size, d_model)
self.pos_encoding = positional_encoding(maximum_position_encoding,
self.d_model)
self.enc_layers = [EncoderLayer(d_model, num_heads, dff, rate)
for _ in range(num_layers)]
self.dropout = tf.keras.layers.Dropout(rate)
def call(self, x, training, mask):
seq_len = tf.shape(x)[1]
# adding embedding and position encoding.
x = self.embedding(x) # (batch_size, input_seq_len, d_model)
x *= tf.math.sqrt(tf.cast(self.d_model, tf.float32))
x += self.pos_encoding[:, :seq_len, :]
x = self.dropout(x, training=training)
for i in range(self.num_layers):
x = self.enc_layers[i](x, training, mask)
return x # (batch_size, input_seq_len, d_model)
sample_encoder = Encoder(num_layers=2, d_model=512, num_heads=8,
dff=2048, input_vocab_size=8500,
maximum_position_encoding=10000)
temp_input = tf.random.uniform((64, 62), dtype=tf.int64, minval=0, maxval=200)
sample_encoder_output = sample_encoder(temp_input, training=False, mask=None)
print(sample_encoder_output.shape) # (batch_size, input_seq_len, d_model)
(64, 62, 512)
Dekoder
Decoder składa się z:
- Osadzanie danych wyjściowych
- Kodowanie pozycyjne
- N warstw dekodera
Cel przechodzi przez osadzanie, które jest sumowane z kodowaniem pozycyjnym. Wynikiem tego podsumowania jest dane wejściowe do warstw dekodera. Wyjście dekodera jest wejściem do końcowej warstwy liniowej.
class Decoder(tf.keras.layers.Layer):
def __init__(self, num_layers, d_model, num_heads, dff, target_vocab_size,
maximum_position_encoding, rate=0.1):
super(Decoder, self).__init__()
self.d_model = d_model
self.num_layers = num_layers
self.embedding = tf.keras.layers.Embedding(target_vocab_size, d_model)
self.pos_encoding = positional_encoding(maximum_position_encoding, d_model)
self.dec_layers = [DecoderLayer(d_model, num_heads, dff, rate)
for _ in range(num_layers)]
self.dropout = tf.keras.layers.Dropout(rate)
def call(self, x, enc_output, training,
look_ahead_mask, padding_mask):
seq_len = tf.shape(x)[1]
attention_weights = {}
x = self.embedding(x) # (batch_size, target_seq_len, d_model)
x *= tf.math.sqrt(tf.cast(self.d_model, tf.float32))
x += self.pos_encoding[:, :seq_len, :]
x = self.dropout(x, training=training)
for i in range(self.num_layers):
x, block1, block2 = self.dec_layers[i](x, enc_output, training,
look_ahead_mask, padding_mask)
attention_weights[f'decoder_layer{i+1}_block1'] = block1
attention_weights[f'decoder_layer{i+1}_block2'] = block2
# x.shape == (batch_size, target_seq_len, d_model)
return x, attention_weights
sample_decoder = Decoder(num_layers=2, d_model=512, num_heads=8,
dff=2048, target_vocab_size=8000,
maximum_position_encoding=5000)
temp_input = tf.random.uniform((64, 26), dtype=tf.int64, minval=0, maxval=200)
output, attn = sample_decoder(temp_input,
enc_output=sample_encoder_output,
training=False,
look_ahead_mask=None,
padding_mask=None)
output.shape, attn['decoder_layer2_block2'].shape
(TensorShape([64, 26, 512]), TensorShape([64, 8, 26, 62]))
Stwórz transformator
Transformator składa się z kodera, dekodera i końcowej warstwy liniowej. Wyjście dekodera jest wejściem do warstwy liniowej, a jego wyjście jest zwracane.
class Transformer(tf.keras.Model):
def __init__(self, num_layers, d_model, num_heads, dff, input_vocab_size,
target_vocab_size, pe_input, pe_target, rate=0.1):
super().__init__()
self.encoder = Encoder(num_layers, d_model, num_heads, dff,
input_vocab_size, pe_input, rate)
self.decoder = Decoder(num_layers, d_model, num_heads, dff,
target_vocab_size, pe_target, rate)
self.final_layer = tf.keras.layers.Dense(target_vocab_size)
def call(self, inputs, training):
# Keras models prefer if you pass all your inputs in the first argument
inp, tar = inputs
enc_padding_mask, look_ahead_mask, dec_padding_mask = self.create_masks(inp, tar)
enc_output = self.encoder(inp, training, enc_padding_mask) # (batch_size, inp_seq_len, d_model)
# dec_output.shape == (batch_size, tar_seq_len, d_model)
dec_output, attention_weights = self.decoder(
tar, enc_output, training, look_ahead_mask, dec_padding_mask)
final_output = self.final_layer(dec_output) # (batch_size, tar_seq_len, target_vocab_size)
return final_output, attention_weights
def create_masks(self, inp, tar):
# Encoder padding mask
enc_padding_mask = create_padding_mask(inp)
# Used in the 2nd attention block in the decoder.
# This padding mask is used to mask the encoder outputs.
dec_padding_mask = create_padding_mask(inp)
# Used in the 1st attention block in the decoder.
# It is used to pad and mask future tokens in the input received by
# the decoder.
look_ahead_mask = create_look_ahead_mask(tf.shape(tar)[1])
dec_target_padding_mask = create_padding_mask(tar)
look_ahead_mask = tf.maximum(dec_target_padding_mask, look_ahead_mask)
return enc_padding_mask, look_ahead_mask, dec_padding_mask
sample_transformer = Transformer(
num_layers=2, d_model=512, num_heads=8, dff=2048,
input_vocab_size=8500, target_vocab_size=8000,
pe_input=10000, pe_target=6000)
temp_input = tf.random.uniform((64, 38), dtype=tf.int64, minval=0, maxval=200)
temp_target = tf.random.uniform((64, 36), dtype=tf.int64, minval=0, maxval=200)
fn_out, _ = sample_transformer([temp_input, temp_target], training=False)
fn_out.shape # (batch_size, tar_seq_len, target_vocab_size)
TensorShape([64, 36, 8000])
Ustaw hiperparametry
Aby ten przykład był mały i stosunkowo szybki, zmniejszono wartości num_layers, d_model, dff .
Zastosowano model bazowy opisany w artykule : num_layers=6, d_model=512, dff=2048 .
num_layers = 4
d_model = 128
dff = 512
num_heads = 8
dropout_rate = 0.1
Optymalizator
Użyj optymalizatora Adam z niestandardowym harmonogramem szybkości uczenia się zgodnie ze wzorem w artykule .
\[\Large{lrate = d_{model}^{-0.5} * \min(step{\_}num^{-0.5}, step{\_}num \cdot warmup{\_}steps^{-1.5})}\]
class CustomSchedule(tf.keras.optimizers.schedules.LearningRateSchedule):
def __init__(self, d_model, warmup_steps=4000):
super(CustomSchedule, self).__init__()
self.d_model = d_model
self.d_model = tf.cast(self.d_model, tf.float32)
self.warmup_steps = warmup_steps
def __call__(self, step):
arg1 = tf.math.rsqrt(step)
arg2 = step * (self.warmup_steps ** -1.5)
return tf.math.rsqrt(self.d_model) * tf.math.minimum(arg1, arg2)
learning_rate = CustomSchedule(d_model)
optimizer = tf.keras.optimizers.Adam(learning_rate, beta_1=0.9, beta_2=0.98,
epsilon=1e-9)
temp_learning_rate_schedule = CustomSchedule(d_model)
plt.plot(temp_learning_rate_schedule(tf.range(40000, dtype=tf.float32)))
plt.ylabel("Learning Rate")
plt.xlabel("Train Step")
Text(0.5, 0, 'Train Step')

Strata i metryki
Ponieważ sekwencje docelowe są dopełnione, ważne jest, aby podczas obliczania straty zastosować maskę dopełniającą.
loss_object = tf.keras.losses.SparseCategoricalCrossentropy(
from_logits=True, reduction='none')
def loss_function(real, pred):
mask = tf.math.logical_not(tf.math.equal(real, 0))
loss_ = loss_object(real, pred)
mask = tf.cast(mask, dtype=loss_.dtype)
loss_ *= mask
return tf.reduce_sum(loss_)/tf.reduce_sum(mask)
def accuracy_function(real, pred):
accuracies = tf.equal(real, tf.argmax(pred, axis=2))
mask = tf.math.logical_not(tf.math.equal(real, 0))
accuracies = tf.math.logical_and(mask, accuracies)
accuracies = tf.cast(accuracies, dtype=tf.float32)
mask = tf.cast(mask, dtype=tf.float32)
return tf.reduce_sum(accuracies)/tf.reduce_sum(mask)
train_loss = tf.keras.metrics.Mean(name='train_loss')
train_accuracy = tf.keras.metrics.Mean(name='train_accuracy')
Szkolenie i sprawdzanie
transformer = Transformer(
num_layers=num_layers,
d_model=d_model,
num_heads=num_heads,
dff=dff,
input_vocab_size=tokenizers.pt.get_vocab_size().numpy(),
target_vocab_size=tokenizers.en.get_vocab_size().numpy(),
pe_input=1000,
pe_target=1000,
rate=dropout_rate)
Utwórz ścieżkę do punktów kontrolnych i menedżera punktów kontrolnych. Będzie to używane do zapisywania punktów kontrolnych w każdej n .
checkpoint_path = "./checkpoints/train"
ckpt = tf.train.Checkpoint(transformer=transformer,
optimizer=optimizer)
ckpt_manager = tf.train.CheckpointManager(ckpt, checkpoint_path, max_to_keep=5)
# if a checkpoint exists, restore the latest checkpoint.
if ckpt_manager.latest_checkpoint:
ckpt.restore(ckpt_manager.latest_checkpoint)
print('Latest checkpoint restored!!')
Cel jest podzielony na tar_inp i tar_real. tar_inp jest przekazywany jako dane wejściowe do dekodera. tar_real to to samo wejście przesunięte o 1: W każdej lokalizacji w tar_input tar_real zawiera następny token, który należy przewidzieć.
Na przykład sentence = „SOS Lew w dżungli śpi EOS”
tar_inp = "SOS Lew w dżungli śpi"
tar_real = "Lew w dżungli śpi EOS"
Transformator jest modelem autoregresywnym: wykonuje prognozy jedna część po części i wykorzystuje dotychczasowe dane wyjściowe, aby decydować, co dalej.
Podczas szkolenia ten przykład wykorzystuje wymuszanie przez nauczyciela (jak w samouczku generowania tekstu ). Wymuszanie nauczyciela przekazuje prawdziwe dane wyjściowe do następnego przedziału czasowego, niezależnie od tego, co model przewiduje w bieżącym przedziale czasowym.
Ponieważ transformator przewiduje każdy token, samouważność pozwala mu spojrzeć na poprzednie tokeny w sekwencji wejściowej, aby lepiej przewidzieć następny token.
Aby zapobiec podglądaniu przez model oczekiwanych wyników, model wykorzystuje maskę z wyprzedzeniem.
EPOCHS = 20
# The @tf.function trace-compiles train_step into a TF graph for faster
# execution. The function specializes to the precise shape of the argument
# tensors. To avoid re-tracing due to the variable sequence lengths or variable
# batch sizes (the last batch is smaller), use input_signature to specify
# more generic shapes.
train_step_signature = [
tf.TensorSpec(shape=(None, None), dtype=tf.int64),
tf.TensorSpec(shape=(None, None), dtype=tf.int64),
]
@tf.function(input_signature=train_step_signature)
def train_step(inp, tar):
tar_inp = tar[:, :-1]
tar_real = tar[:, 1:]
with tf.GradientTape() as tape:
predictions, _ = transformer([inp, tar_inp],
training = True)
loss = loss_function(tar_real, predictions)
gradients = tape.gradient(loss, transformer.trainable_variables)
optimizer.apply_gradients(zip(gradients, transformer.trainable_variables))
train_loss(loss)
train_accuracy(accuracy_function(tar_real, predictions))
Językiem wejściowym jest portugalski, a językiem docelowym język angielski.
for epoch in range(EPOCHS):
start = time.time()
train_loss.reset_states()
train_accuracy.reset_states()
# inp -> portuguese, tar -> english
for (batch, (inp, tar)) in enumerate(train_batches):
train_step(inp, tar)
if batch % 50 == 0:
print(f'Epoch {epoch + 1} Batch {batch} Loss {train_loss.result():.4f} Accuracy {train_accuracy.result():.4f}')
if (epoch + 1) % 5 == 0:
ckpt_save_path = ckpt_manager.save()
print(f'Saving checkpoint for epoch {epoch+1} at {ckpt_save_path}')
print(f'Epoch {epoch + 1} Loss {train_loss.result():.4f} Accuracy {train_accuracy.result():.4f}')
print(f'Time taken for 1 epoch: {time.time() - start:.2f} secs\n')
Epoch 1 Batch 0 Loss 8.8600 Accuracy 0.0000 Epoch 1 Batch 50 Loss 8.7935 Accuracy 0.0082 Epoch 1 Batch 100 Loss 8.6902 Accuracy 0.0273 Epoch 1 Batch 150 Loss 8.5769 Accuracy 0.0335 Epoch 1 Batch 200 Loss 8.4387 Accuracy 0.0365 Epoch 1 Batch 250 Loss 8.2718 Accuracy 0.0386 Epoch 1 Batch 300 Loss 8.0845 Accuracy 0.0412 Epoch 1 Batch 350 Loss 7.8877 Accuracy 0.0481 Epoch 1 Batch 400 Loss 7.7002 Accuracy 0.0552 Epoch 1 Batch 450 Loss 7.5304 Accuracy 0.0629 Epoch 1 Batch 500 Loss 7.3857 Accuracy 0.0702 Epoch 1 Batch 550 Loss 7.2542 Accuracy 0.0776 Epoch 1 Batch 600 Loss 7.1327 Accuracy 0.0851 Epoch 1 Batch 650 Loss 7.0164 Accuracy 0.0930 Epoch 1 Batch 700 Loss 6.9088 Accuracy 0.1003 Epoch 1 Batch 750 Loss 6.8080 Accuracy 0.1070 Epoch 1 Batch 800 Loss 6.7173 Accuracy 0.1129 Epoch 1 Loss 6.7021 Accuracy 0.1139 Time taken for 1 epoch: 58.85 secs Epoch 2 Batch 0 Loss 5.2952 Accuracy 0.2221 Epoch 2 Batch 50 Loss 5.2513 Accuracy 0.2094 Epoch 2 Batch 100 Loss 5.2103 Accuracy 0.2140 Epoch 2 Batch 150 Loss 5.1780 Accuracy 0.2176 Epoch 2 Batch 200 Loss 5.1436 Accuracy 0.2218 Epoch 2 Batch 250 Loss 5.1173 Accuracy 0.2246 Epoch 2 Batch 300 Loss 5.0939 Accuracy 0.2269 Epoch 2 Batch 350 Loss 5.0719 Accuracy 0.2295 Epoch 2 Batch 400 Loss 5.0508 Accuracy 0.2318 Epoch 2 Batch 450 Loss 5.0308 Accuracy 0.2337 Epoch 2 Batch 500 Loss 5.0116 Accuracy 0.2353 Epoch 2 Batch 550 Loss 4.9897 Accuracy 0.2376 Epoch 2 Batch 600 Loss 4.9701 Accuracy 0.2394 Epoch 2 Batch 650 Loss 4.9543 Accuracy 0.2407 Epoch 2 Batch 700 Loss 4.9345 Accuracy 0.2425 Epoch 2 Batch 750 Loss 4.9169 Accuracy 0.2442 Epoch 2 Batch 800 Loss 4.9007 Accuracy 0.2455 Epoch 2 Loss 4.8988 Accuracy 0.2456 Time taken for 1 epoch: 45.69 secs Epoch 3 Batch 0 Loss 4.7236 Accuracy 0.2578 Epoch 3 Batch 50 Loss 4.5860 Accuracy 0.2705 Epoch 3 Batch 100 Loss 4.5758 Accuracy 0.2723 Epoch 3 Batch 150 Loss 4.5789 Accuracy 0.2728 Epoch 3 Batch 200 Loss 4.5699 Accuracy 0.2737 Epoch 3 Batch 250 Loss 4.5529 Accuracy 0.2753 Epoch 3 Batch 300 Loss 4.5462 Accuracy 0.2753 Epoch 3 Batch 350 Loss 4.5377 Accuracy 0.2762 Epoch 3 Batch 400 Loss 4.5301 Accuracy 0.2764 Epoch 3 Batch 450 Loss 4.5155 Accuracy 0.2776 Epoch 3 Batch 500 Loss 4.5036 Accuracy 0.2787 Epoch 3 Batch 550 Loss 4.4950 Accuracy 0.2794 Epoch 3 Batch 600 Loss 4.4860 Accuracy 0.2804 Epoch 3 Batch 650 Loss 4.4753 Accuracy 0.2814 Epoch 3 Batch 700 Loss 4.4643 Accuracy 0.2823 Epoch 3 Batch 750 Loss 4.4530 Accuracy 0.2837 Epoch 3 Batch 800 Loss 4.4401 Accuracy 0.2852 Epoch 3 Loss 4.4375 Accuracy 0.2855 Time taken for 1 epoch: 45.96 secs Epoch 4 Batch 0 Loss 3.9880 Accuracy 0.3285 Epoch 4 Batch 50 Loss 4.1496 Accuracy 0.3146 Epoch 4 Batch 100 Loss 4.1353 Accuracy 0.3146 Epoch 4 Batch 150 Loss 4.1263 Accuracy 0.3153 Epoch 4 Batch 200 Loss 4.1171 Accuracy 0.3165 Epoch 4 Batch 250 Loss 4.1144 Accuracy 0.3169 Epoch 4 Batch 300 Loss 4.0976 Accuracy 0.3190 Epoch 4 Batch 350 Loss 4.0848 Accuracy 0.3206 Epoch 4 Batch 400 Loss 4.0703 Accuracy 0.3228 Epoch 4 Batch 450 Loss 4.0569 Accuracy 0.3247 Epoch 4 Batch 500 Loss 4.0429 Accuracy 0.3265 Epoch 4 Batch 550 Loss 4.0231 Accuracy 0.3291 Epoch 4 Batch 600 Loss 4.0075 Accuracy 0.3311 Epoch 4 Batch 650 Loss 3.9933 Accuracy 0.3331 Epoch 4 Batch 700 Loss 3.9778 Accuracy 0.3353 Epoch 4 Batch 750 Loss 3.9625 Accuracy 0.3375 Epoch 4 Batch 800 Loss 3.9505 Accuracy 0.3393 Epoch 4 Loss 3.9483 Accuracy 0.3397 Time taken for 1 epoch: 45.59 secs Epoch 5 Batch 0 Loss 3.7342 Accuracy 0.3712 Epoch 5 Batch 50 Loss 3.5723 Accuracy 0.3851 Epoch 5 Batch 100 Loss 3.5656 Accuracy 0.3861 Epoch 5 Batch 150 Loss 3.5706 Accuracy 0.3857 Epoch 5 Batch 200 Loss 3.5701 Accuracy 0.3863 Epoch 5 Batch 250 Loss 3.5621 Accuracy 0.3877 Epoch 5 Batch 300 Loss 3.5527 Accuracy 0.3887 Epoch 5 Batch 350 Loss 3.5429 Accuracy 0.3904 Epoch 5 Batch 400 Loss 3.5318 Accuracy 0.3923 Epoch 5 Batch 450 Loss 3.5238 Accuracy 0.3937 Epoch 5 Batch 500 Loss 3.5141 Accuracy 0.3949 Epoch 5 Batch 550 Loss 3.5066 Accuracy 0.3958 Epoch 5 Batch 600 Loss 3.4956 Accuracy 0.3974 Epoch 5 Batch 650 Loss 3.4876 Accuracy 0.3986 Epoch 5 Batch 700 Loss 3.4788 Accuracy 0.4000 Epoch 5 Batch 750 Loss 3.4676 Accuracy 0.4014 Epoch 5 Batch 800 Loss 3.4590 Accuracy 0.4027 Saving checkpoint for epoch 5 at ./checkpoints/train/ckpt-1 Epoch 5 Loss 3.4583 Accuracy 0.4029 Time taken for 1 epoch: 46.04 secs Epoch 6 Batch 0 Loss 3.0131 Accuracy 0.4610 Epoch 6 Batch 50 Loss 3.1403 Accuracy 0.4404 Epoch 6 Batch 100 Loss 3.1320 Accuracy 0.4422 Epoch 6 Batch 150 Loss 3.1314 Accuracy 0.4425 Epoch 6 Batch 200 Loss 3.1450 Accuracy 0.4411 Epoch 6 Batch 250 Loss 3.1438 Accuracy 0.4405 Epoch 6 Batch 300 Loss 3.1306 Accuracy 0.4424 Epoch 6 Batch 350 Loss 3.1161 Accuracy 0.4445 Epoch 6 Batch 400 Loss 3.1097 Accuracy 0.4453 Epoch 6 Batch 450 Loss 3.0983 Accuracy 0.4469 Epoch 6 Batch 500 Loss 3.0900 Accuracy 0.4483 Epoch 6 Batch 550 Loss 3.0816 Accuracy 0.4496 Epoch 6 Batch 600 Loss 3.0740 Accuracy 0.4507 Epoch 6 Batch 650 Loss 3.0695 Accuracy 0.4514 Epoch 6 Batch 700 Loss 3.0602 Accuracy 0.4528 Epoch 6 Batch 750 Loss 3.0528 Accuracy 0.4539 Epoch 6 Batch 800 Loss 3.0436 Accuracy 0.4553 Epoch 6 Loss 3.0425 Accuracy 0.4554 Time taken for 1 epoch: 46.13 secs Epoch 7 Batch 0 Loss 2.7147 Accuracy 0.4940 Epoch 7 Batch 50 Loss 2.7671 Accuracy 0.4863 Epoch 7 Batch 100 Loss 2.7369 Accuracy 0.4934 Epoch 7 Batch 150 Loss 2.7562 Accuracy 0.4909 Epoch 7 Batch 200 Loss 2.7441 Accuracy 0.4926 Epoch 7 Batch 250 Loss 2.7464 Accuracy 0.4929 Epoch 7 Batch 300 Loss 2.7430 Accuracy 0.4932 Epoch 7 Batch 350 Loss 2.7342 Accuracy 0.4944 Epoch 7 Batch 400 Loss 2.7271 Accuracy 0.4954 Epoch 7 Batch 450 Loss 2.7215 Accuracy 0.4963 Epoch 7 Batch 500 Loss 2.7157 Accuracy 0.4972 Epoch 7 Batch 550 Loss 2.7123 Accuracy 0.4978 Epoch 7 Batch 600 Loss 2.7071 Accuracy 0.4985 Epoch 7 Batch 650 Loss 2.7038 Accuracy 0.4990 Epoch 7 Batch 700 Loss 2.6979 Accuracy 0.5002 Epoch 7 Batch 750 Loss 2.6946 Accuracy 0.5007 Epoch 7 Batch 800 Loss 2.6923 Accuracy 0.5013 Epoch 7 Loss 2.6913 Accuracy 0.5015 Time taken for 1 epoch: 46.02 secs Epoch 8 Batch 0 Loss 2.3681 Accuracy 0.5459 Epoch 8 Batch 50 Loss 2.4812 Accuracy 0.5260 Epoch 8 Batch 100 Loss 2.4682 Accuracy 0.5294 Epoch 8 Batch 150 Loss 2.4743 Accuracy 0.5287 Epoch 8 Batch 200 Loss 2.4625 Accuracy 0.5303 Epoch 8 Batch 250 Loss 2.4627 Accuracy 0.5303 Epoch 8 Batch 300 Loss 2.4624 Accuracy 0.5308 Epoch 8 Batch 350 Loss 2.4586 Accuracy 0.5314 Epoch 8 Batch 400 Loss 2.4532 Accuracy 0.5324 Epoch 8 Batch 450 Loss 2.4530 Accuracy 0.5326 Epoch 8 Batch 500 Loss 2.4508 Accuracy 0.5330 Epoch 8 Batch 550 Loss 2.4481 Accuracy 0.5338 Epoch 8 Batch 600 Loss 2.4455 Accuracy 0.5343 Epoch 8 Batch 650 Loss 2.4427 Accuracy 0.5348 Epoch 8 Batch 700 Loss 2.4399 Accuracy 0.5352 Epoch 8 Batch 750 Loss 2.4392 Accuracy 0.5353 Epoch 8 Batch 800 Loss 2.4367 Accuracy 0.5358 Epoch 8 Loss 2.4357 Accuracy 0.5360 Time taken for 1 epoch: 45.31 secs Epoch 9 Batch 0 Loss 2.1790 Accuracy 0.5595 Epoch 9 Batch 50 Loss 2.2201 Accuracy 0.5676 Epoch 9 Batch 100 Loss 2.2420 Accuracy 0.5629 Epoch 9 Batch 150 Loss 2.2444 Accuracy 0.5623 Epoch 9 Batch 200 Loss 2.2535 Accuracy 0.5610 Epoch 9 Batch 250 Loss 2.2562 Accuracy 0.5603 Epoch 9 Batch 300 Loss 2.2572 Accuracy 0.5603 Epoch 9 Batch 350 Loss 2.2646 Accuracy 0.5592 Epoch 9 Batch 400 Loss 2.2624 Accuracy 0.5597 Epoch 9 Batch 450 Loss 2.2595 Accuracy 0.5601 Epoch 9 Batch 500 Loss 2.2598 Accuracy 0.5600 Epoch 9 Batch 550 Loss 2.2590 Accuracy 0.5602 Epoch 9 Batch 600 Loss 2.2563 Accuracy 0.5607 Epoch 9 Batch 650 Loss 2.2578 Accuracy 0.5606 Epoch 9 Batch 700 Loss 2.2550 Accuracy 0.5611 Epoch 9 Batch 750 Loss 2.2536 Accuracy 0.5614 Epoch 9 Batch 800 Loss 2.2511 Accuracy 0.5618 Epoch 9 Loss 2.2503 Accuracy 0.5620 Time taken for 1 epoch: 44.87 secs Epoch 10 Batch 0 Loss 2.0921 Accuracy 0.5928 Epoch 10 Batch 50 Loss 2.1196 Accuracy 0.5788 Epoch 10 Batch 100 Loss 2.0969 Accuracy 0.5828 Epoch 10 Batch 150 Loss 2.0954 Accuracy 0.5834 Epoch 10 Batch 200 Loss 2.0965 Accuracy 0.5827 Epoch 10 Batch 250 Loss 2.1029 Accuracy 0.5822 Epoch 10 Batch 300 Loss 2.0999 Accuracy 0.5827 Epoch 10 Batch 350 Loss 2.1007 Accuracy 0.5825 Epoch 10 Batch 400 Loss 2.1011 Accuracy 0.5825 Epoch 10 Batch 450 Loss 2.1020 Accuracy 0.5826 Epoch 10 Batch 500 Loss 2.0977 Accuracy 0.5831 Epoch 10 Batch 550 Loss 2.0984 Accuracy 0.5831 Epoch 10 Batch 600 Loss 2.0985 Accuracy 0.5832 Epoch 10 Batch 650 Loss 2.1006 Accuracy 0.5830 Epoch 10 Batch 700 Loss 2.1017 Accuracy 0.5829 Epoch 10 Batch 750 Loss 2.1058 Accuracy 0.5825 Epoch 10 Batch 800 Loss 2.1059 Accuracy 0.5825 Saving checkpoint for epoch 10 at ./checkpoints/train/ckpt-2 Epoch 10 Loss 2.1060 Accuracy 0.5825 Time taken for 1 epoch: 45.06 secs Epoch 11 Batch 0 Loss 2.1150 Accuracy 0.5829 Epoch 11 Batch 50 Loss 1.9694 Accuracy 0.6017 Epoch 11 Batch 100 Loss 1.9746 Accuracy 0.6007 Epoch 11 Batch 150 Loss 1.9787 Accuracy 0.5996 Epoch 11 Batch 200 Loss 1.9798 Accuracy 0.5992 Epoch 11 Batch 250 Loss 1.9781 Accuracy 0.5998 Epoch 11 Batch 300 Loss 1.9772 Accuracy 0.5999 Epoch 11 Batch 350 Loss 1.9807 Accuracy 0.5995 Epoch 11 Batch 400 Loss 1.9836 Accuracy 0.5990 Epoch 11 Batch 450 Loss 1.9854 Accuracy 0.5986 Epoch 11 Batch 500 Loss 1.9832 Accuracy 0.5993 Epoch 11 Batch 550 Loss 1.9828 Accuracy 0.5993 Epoch 11 Batch 600 Loss 1.9812 Accuracy 0.5996 Epoch 11 Batch 650 Loss 1.9822 Accuracy 0.5996 Epoch 11 Batch 700 Loss 1.9825 Accuracy 0.5997 Epoch 11 Batch 750 Loss 1.9848 Accuracy 0.5994 Epoch 11 Batch 800 Loss 1.9883 Accuracy 0.5990 Epoch 11 Loss 1.9891 Accuracy 0.5989 Time taken for 1 epoch: 44.58 secs Epoch 12 Batch 0 Loss 1.8522 Accuracy 0.6168 Epoch 12 Batch 50 Loss 1.8462 Accuracy 0.6167 Epoch 12 Batch 100 Loss 1.8434 Accuracy 0.6191 Epoch 12 Batch 150 Loss 1.8506 Accuracy 0.6189 Epoch 12 Batch 200 Loss 1.8582 Accuracy 0.6178 Epoch 12 Batch 250 Loss 1.8732 Accuracy 0.6155 Epoch 12 Batch 300 Loss 1.8725 Accuracy 0.6159 Epoch 12 Batch 350 Loss 1.8708 Accuracy 0.6163 Epoch 12 Batch 400 Loss 1.8696 Accuracy 0.6164 Epoch 12 Batch 450 Loss 1.8696 Accuracy 0.6168 Epoch 12 Batch 500 Loss 1.8748 Accuracy 0.6160 Epoch 12 Batch 550 Loss 1.8793 Accuracy 0.6153 Epoch 12 Batch 600 Loss 1.8826 Accuracy 0.6149 Epoch 12 Batch 650 Loss 1.8851 Accuracy 0.6145 Epoch 12 Batch 700 Loss 1.8878 Accuracy 0.6143 Epoch 12 Batch 750 Loss 1.8881 Accuracy 0.6142 Epoch 12 Batch 800 Loss 1.8906 Accuracy 0.6139 Epoch 12 Loss 1.8919 Accuracy 0.6137 Time taken for 1 epoch: 44.87 secs Epoch 13 Batch 0 Loss 1.7038 Accuracy 0.6438 Epoch 13 Batch 50 Loss 1.7587 Accuracy 0.6309 Epoch 13 Batch 100 Loss 1.7641 Accuracy 0.6313 Epoch 13 Batch 150 Loss 1.7736 Accuracy 0.6299 Epoch 13 Batch 200 Loss 1.7743 Accuracy 0.6299 Epoch 13 Batch 250 Loss 1.7787 Accuracy 0.6293 Epoch 13 Batch 300 Loss 1.7820 Accuracy 0.6286 Epoch 13 Batch 350 Loss 1.7890 Accuracy 0.6276 Epoch 13 Batch 400 Loss 1.7963 Accuracy 0.6264 Epoch 13 Batch 450 Loss 1.7984 Accuracy 0.6261 Epoch 13 Batch 500 Loss 1.8014 Accuracy 0.6256 Epoch 13 Batch 550 Loss 1.8018 Accuracy 0.6255 Epoch 13 Batch 600 Loss 1.8033 Accuracy 0.6253 Epoch 13 Batch 650 Loss 1.8057 Accuracy 0.6250 Epoch 13 Batch 700 Loss 1.8100 Accuracy 0.6246 Epoch 13 Batch 750 Loss 1.8123 Accuracy 0.6244 Epoch 13 Batch 800 Loss 1.8123 Accuracy 0.6246 Epoch 13 Loss 1.8123 Accuracy 0.6246 Time taken for 1 epoch: 45.34 secs Epoch 14 Batch 0 Loss 2.0031 Accuracy 0.5889 Epoch 14 Batch 50 Loss 1.6906 Accuracy 0.6432 Epoch 14 Batch 100 Loss 1.7077 Accuracy 0.6407 Epoch 14 Batch 150 Loss 1.7113 Accuracy 0.6401 Epoch 14 Batch 200 Loss 1.7192 Accuracy 0.6382 Epoch 14 Batch 250 Loss 1.7220 Accuracy 0.6377 Epoch 14 Batch 300 Loss 1.7222 Accuracy 0.6376 Epoch 14 Batch 350 Loss 1.7250 Accuracy 0.6372 Epoch 14 Batch 400 Loss 1.7220 Accuracy 0.6377 Epoch 14 Batch 450 Loss 1.7209 Accuracy 0.6380 Epoch 14 Batch 500 Loss 1.7248 Accuracy 0.6377 Epoch 14 Batch 550 Loss 1.7264 Accuracy 0.6374 Epoch 14 Batch 600 Loss 1.7283 Accuracy 0.6373 Epoch 14 Batch 650 Loss 1.7307 Accuracy 0.6372 Epoch 14 Batch 700 Loss 1.7334 Accuracy 0.6367 Epoch 14 Batch 750 Loss 1.7372 Accuracy 0.6362 Epoch 14 Batch 800 Loss 1.7398 Accuracy 0.6358 Epoch 14 Loss 1.7396 Accuracy 0.6358 Time taken for 1 epoch: 46.00 secs Epoch 15 Batch 0 Loss 1.6520 Accuracy 0.6395 Epoch 15 Batch 50 Loss 1.6565 Accuracy 0.6480 Epoch 15 Batch 100 Loss 1.6396 Accuracy 0.6495 Epoch 15 Batch 150 Loss 1.6473 Accuracy 0.6488 Epoch 15 Batch 200 Loss 1.6486 Accuracy 0.6488 Epoch 15 Batch 250 Loss 1.6539 Accuracy 0.6483 Epoch 15 Batch 300 Loss 1.6595 Accuracy 0.6473 Epoch 15 Batch 350 Loss 1.6591 Accuracy 0.6472 Epoch 15 Batch 400 Loss 1.6584 Accuracy 0.6470 Epoch 15 Batch 450 Loss 1.6614 Accuracy 0.6467 Epoch 15 Batch 500 Loss 1.6617 Accuracy 0.6468 Epoch 15 Batch 550 Loss 1.6648 Accuracy 0.6464 Epoch 15 Batch 600 Loss 1.6680 Accuracy 0.6459 Epoch 15 Batch 650 Loss 1.6688 Accuracy 0.6459 Epoch 15 Batch 700 Loss 1.6714 Accuracy 0.6456 Epoch 15 Batch 750 Loss 1.6756 Accuracy 0.6450 Epoch 15 Batch 800 Loss 1.6790 Accuracy 0.6445 Saving checkpoint for epoch 15 at ./checkpoints/train/ckpt-3 Epoch 15 Loss 1.6786 Accuracy 0.6446 Time taken for 1 epoch: 46.56 secs Epoch 16 Batch 0 Loss 1.5922 Accuracy 0.6547 Epoch 16 Batch 50 Loss 1.5757 Accuracy 0.6599 Epoch 16 Batch 100 Loss 1.5844 Accuracy 0.6591 Epoch 16 Batch 150 Loss 1.5927 Accuracy 0.6579 Epoch 16 Batch 200 Loss 1.5944 Accuracy 0.6575 Epoch 16 Batch 250 Loss 1.5972 Accuracy 0.6571 Epoch 16 Batch 300 Loss 1.5999 Accuracy 0.6568 Epoch 16 Batch 350 Loss 1.6029 Accuracy 0.6561 Epoch 16 Batch 400 Loss 1.6053 Accuracy 0.6558 Epoch 16 Batch 450 Loss 1.6056 Accuracy 0.6557 Epoch 16 Batch 500 Loss 1.6094 Accuracy 0.6553 Epoch 16 Batch 550 Loss 1.6125 Accuracy 0.6548 Epoch 16 Batch 600 Loss 1.6149 Accuracy 0.6543 Epoch 16 Batch 650 Loss 1.6171 Accuracy 0.6541 Epoch 16 Batch 700 Loss 1.6201 Accuracy 0.6537 Epoch 16 Batch 750 Loss 1.6229 Accuracy 0.6533 Epoch 16 Batch 800 Loss 1.6252 Accuracy 0.6531 Epoch 16 Loss 1.6253 Accuracy 0.6531 Time taken for 1 epoch: 45.84 secs Epoch 17 Batch 0 Loss 1.6605 Accuracy 0.6482 Epoch 17 Batch 50 Loss 1.5219 Accuracy 0.6692 Epoch 17 Batch 100 Loss 1.5292 Accuracy 0.6681 Epoch 17 Batch 150 Loss 1.5324 Accuracy 0.6674 Epoch 17 Batch 200 Loss 1.5379 Accuracy 0.6666 Epoch 17 Batch 250 Loss 1.5416 Accuracy 0.6656 Epoch 17 Batch 300 Loss 1.5480 Accuracy 0.6646 Epoch 17 Batch 350 Loss 1.5522 Accuracy 0.6639 Epoch 17 Batch 400 Loss 1.5556 Accuracy 0.6634 Epoch 17 Batch 450 Loss 1.5567 Accuracy 0.6634 Epoch 17 Batch 500 Loss 1.5606 Accuracy 0.6629 Epoch 17 Batch 550 Loss 1.5641 Accuracy 0.6624 Epoch 17 Batch 600 Loss 1.5659 Accuracy 0.6621 Epoch 17 Batch 650 Loss 1.5685 Accuracy 0.6618 Epoch 17 Batch 700 Loss 1.5716 Accuracy 0.6614 Epoch 17 Batch 750 Loss 1.5748 Accuracy 0.6610 Epoch 17 Batch 800 Loss 1.5764 Accuracy 0.6609 Epoch 17 Loss 1.5773 Accuracy 0.6607 Time taken for 1 epoch: 45.01 secs Epoch 18 Batch 0 Loss 1.5065 Accuracy 0.6638 Epoch 18 Batch 50 Loss 1.4985 Accuracy 0.6713 Epoch 18 Batch 100 Loss 1.4979 Accuracy 0.6721 Epoch 18 Batch 150 Loss 1.5022 Accuracy 0.6712 Epoch 18 Batch 200 Loss 1.5012 Accuracy 0.6714 Epoch 18 Batch 250 Loss 1.5000 Accuracy 0.6716 Epoch 18 Batch 300 Loss 1.5044 Accuracy 0.6710 Epoch 18 Batch 350 Loss 1.5019 Accuracy 0.6719 Epoch 18 Batch 400 Loss 1.5053 Accuracy 0.6713 Epoch 18 Batch 450 Loss 1.5091 Accuracy 0.6707 Epoch 18 Batch 500 Loss 1.5131 Accuracy 0.6701 Epoch 18 Batch 550 Loss 1.5152 Accuracy 0.6698 Epoch 18 Batch 600 Loss 1.5177 Accuracy 0.6694 Epoch 18 Batch 650 Loss 1.5211 Accuracy 0.6689 Epoch 18 Batch 700 Loss 1.5246 Accuracy 0.6684 Epoch 18 Batch 750 Loss 1.5251 Accuracy 0.6685 Epoch 18 Batch 800 Loss 1.5302 Accuracy 0.6678 Epoch 18 Loss 1.5314 Accuracy 0.6675 Time taken for 1 epoch: 44.91 secs Epoch 19 Batch 0 Loss 1.2939 Accuracy 0.7080 Epoch 19 Batch 50 Loss 1.4311 Accuracy 0.6839 Epoch 19 Batch 100 Loss 1.4424 Accuracy 0.6812 Epoch 19 Batch 150 Loss 1.4520 Accuracy 0.6799 Epoch 19 Batch 200 Loss 1.4604 Accuracy 0.6782 Epoch 19 Batch 250 Loss 1.4606 Accuracy 0.6783 Epoch 19 Batch 300 Loss 1.4627 Accuracy 0.6783 Epoch 19 Batch 350 Loss 1.4664 Accuracy 0.6777 Epoch 19 Batch 400 Loss 1.4720 Accuracy 0.6769 Epoch 19 Batch 450 Loss 1.4742 Accuracy 0.6764 Epoch 19 Batch 500 Loss 1.4772 Accuracy 0.6760 Epoch 19 Batch 550 Loss 1.4784 Accuracy 0.6759 Epoch 19 Batch 600 Loss 1.4807 Accuracy 0.6756 Epoch 19 Batch 650 Loss 1.4846 Accuracy 0.6750 Epoch 19 Batch 700 Loss 1.4877 Accuracy 0.6747 Epoch 19 Batch 750 Loss 1.4890 Accuracy 0.6745 Epoch 19 Batch 800 Loss 1.4918 Accuracy 0.6741 Epoch 19 Loss 1.4924 Accuracy 0.6740 Time taken for 1 epoch: 45.24 secs Epoch 20 Batch 0 Loss 1.3994 Accuracy 0.6883 Epoch 20 Batch 50 Loss 1.3894 Accuracy 0.6911 Epoch 20 Batch 100 Loss 1.4050 Accuracy 0.6889 Epoch 20 Batch 150 Loss 1.4108 Accuracy 0.6883 Epoch 20 Batch 200 Loss 1.4111 Accuracy 0.6876 Epoch 20 Batch 250 Loss 1.4121 Accuracy 0.6871 Epoch 20 Batch 300 Loss 1.4179 Accuracy 0.6859 Epoch 20 Batch 350 Loss 1.4182 Accuracy 0.6857 Epoch 20 Batch 400 Loss 1.4212 Accuracy 0.6851 Epoch 20 Batch 450 Loss 1.4282 Accuracy 0.6837 Epoch 20 Batch 500 Loss 1.4296 Accuracy 0.6833 Epoch 20 Batch 550 Loss 1.4343 Accuracy 0.6826 Epoch 20 Batch 600 Loss 1.4375 Accuracy 0.6822 Epoch 20 Batch 650 Loss 1.4413 Accuracy 0.6817 Epoch 20 Batch 700 Loss 1.4464 Accuracy 0.6809 Epoch 20 Batch 750 Loss 1.4491 Accuracy 0.6805 Epoch 20 Batch 800 Loss 1.4530 Accuracy 0.6799 Saving checkpoint for epoch 20 at ./checkpoints/train/ckpt-4 Epoch 20 Loss 1.4533 Accuracy 0.6799 Time taken for 1 epoch: 45.84 secs
Uruchom wnioskowanie
Do wnioskowania używane są następujące kroki:
- Zakoduj zdanie wejściowe za pomocą tokenizera portugalskiego (
tokenizers.pt). To jest wejście enkodera. - Wejście dekodera jest inicjowane na tokenie
[START]. - Oblicz maski dopełniające i maski wybiegające w przyszłość.
-
decoderwysyła następnie prognozy, patrząc na daneencoder outputi własne dane wyjściowe (samouwaga). - Połącz przewidywany token z danymi wejściowymi dekodera i przekaż go do dekodera.
- W tym podejściu dekoder przewiduje następny token na podstawie wcześniej przewidywanych tokenów.
class Translator(tf.Module):
def __init__(self, tokenizers, transformer):
self.tokenizers = tokenizers
self.transformer = transformer
def __call__(self, sentence, max_length=20):
# input sentence is portuguese, hence adding the start and end token
assert isinstance(sentence, tf.Tensor)
if len(sentence.shape) == 0:
sentence = sentence[tf.newaxis]
sentence = self.tokenizers.pt.tokenize(sentence).to_tensor()
encoder_input = sentence
# as the target is english, the first token to the transformer should be the
# english start token.
start_end = self.tokenizers.en.tokenize([''])[0]
start = start_end[0][tf.newaxis]
end = start_end[1][tf.newaxis]
# `tf.TensorArray` is required here (instead of a python list) so that the
# dynamic-loop can be traced by `tf.function`.
output_array = tf.TensorArray(dtype=tf.int64, size=0, dynamic_size=True)
output_array = output_array.write(0, start)
for i in tf.range(max_length):
output = tf.transpose(output_array.stack())
predictions, _ = self.transformer([encoder_input, output], training=False)
# select the last token from the seq_len dimension
predictions = predictions[:, -1:, :] # (batch_size, 1, vocab_size)
predicted_id = tf.argmax(predictions, axis=-1)
# concatentate the predicted_id to the output which is given to the decoder
# as its input.
output_array = output_array.write(i+1, predicted_id[0])
if predicted_id == end:
break
output = tf.transpose(output_array.stack())
# output.shape (1, tokens)
text = tokenizers.en.detokenize(output)[0] # shape: ()
tokens = tokenizers.en.lookup(output)[0]
# `tf.function` prevents us from using the attention_weights that were
# calculated on the last iteration of the loop. So recalculate them outside
# the loop.
_, attention_weights = self.transformer([encoder_input, output[:,:-1]], training=False)
return text, tokens, attention_weights
Utwórz instancję tej klasy Translator i wypróbuj ją kilka razy:
translator = Translator(tokenizers, transformer)
def print_translation(sentence, tokens, ground_truth):
print(f'{"Input:":15s}: {sentence}')
print(f'{"Prediction":15s}: {tokens.numpy().decode("utf-8")}')
print(f'{"Ground truth":15s}: {ground_truth}')
sentence = "este é um problema que temos que resolver."
ground_truth = "this is a problem we have to solve ."
translated_text, translated_tokens, attention_weights = translator(
tf.constant(sentence))
print_translation(sentence, translated_text, ground_truth)
Input: : este é um problema que temos que resolver. Prediction : this is a problem that we have to solve . Ground truth : this is a problem we have to solve .
sentence = "os meus vizinhos ouviram sobre esta ideia."
ground_truth = "and my neighboring homes heard about this idea ."
translated_text, translated_tokens, attention_weights = translator(
tf.constant(sentence))
print_translation(sentence, translated_text, ground_truth)
Input: : os meus vizinhos ouviram sobre esta ideia. Prediction : my neighbors heard about this idea . Ground truth : and my neighboring homes heard about this idea .
sentence = "vou então muito rapidamente partilhar convosco algumas histórias de algumas coisas mágicas que aconteceram."
ground_truth = "so i \'ll just share with you some stories very quickly of some magical things that have happened ."
translated_text, translated_tokens, attention_weights = translator(
tf.constant(sentence))
print_translation(sentence, translated_text, ground_truth)
Input: : vou então muito rapidamente partilhar convosco algumas histórias de algumas coisas mágicas que aconteceram. Prediction : so i ' m going to share with you a few stories of some magic things that have happened . Ground truth : so i 'll just share with you some stories very quickly of some magical things that have happened .
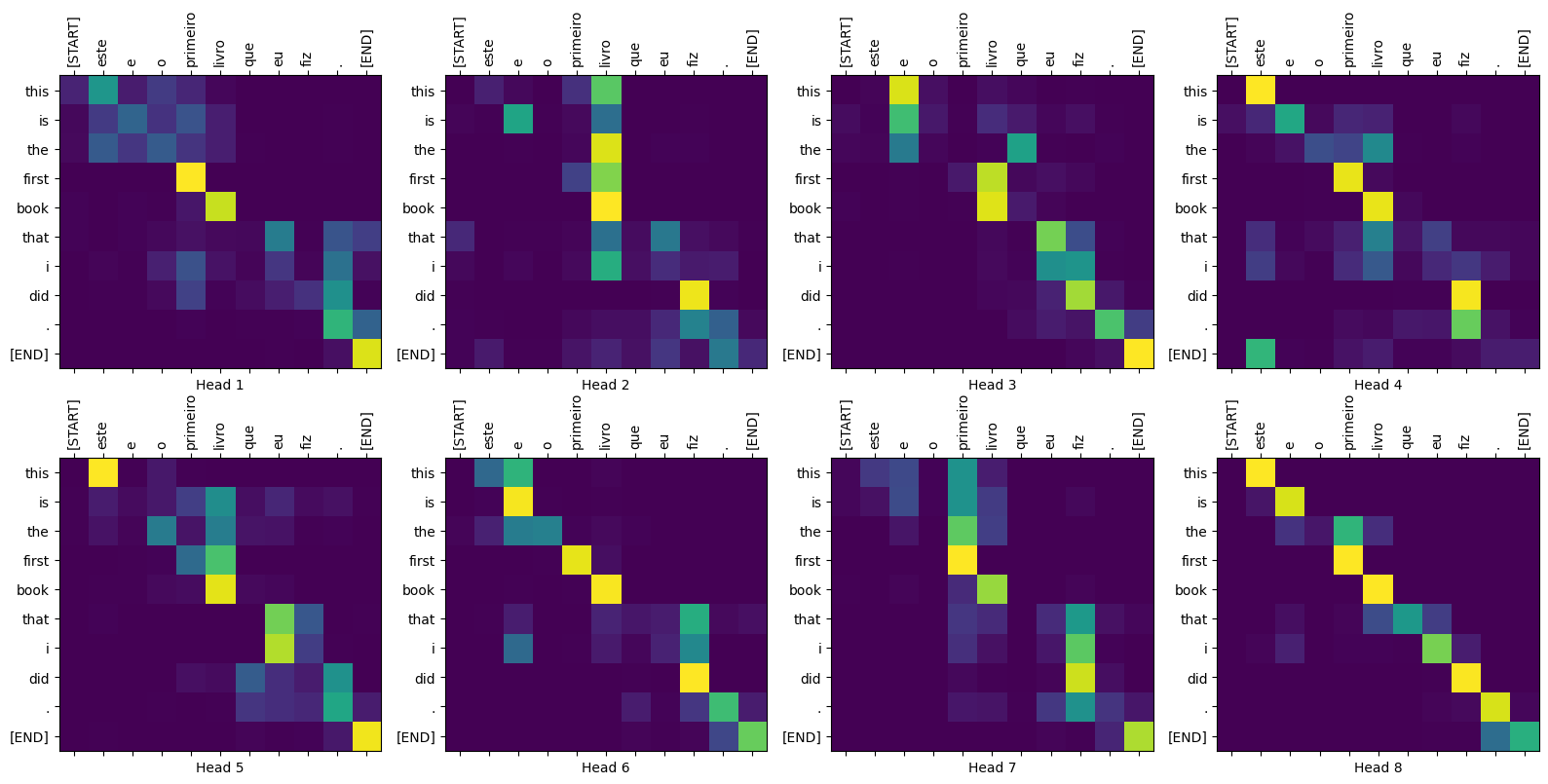
Wykresy uwagi
Klasa Translator zwraca słownik map uwagi, których możesz użyć do wizualizacji wewnętrznego działania modelu:
sentence = "este é o primeiro livro que eu fiz."
ground_truth = "this is the first book i've ever done."
translated_text, translated_tokens, attention_weights = translator(
tf.constant(sentence))
print_translation(sentence, translated_text, ground_truth)
Input: : este é o primeiro livro que eu fiz. Prediction : this is the first book that i did . Ground truth : this is the first book i've ever done.
def plot_attention_head(in_tokens, translated_tokens, attention):
# The plot is of the attention when a token was generated.
# The model didn't generate `<START>` in the output. Skip it.
translated_tokens = translated_tokens[1:]
ax = plt.gca()
ax.matshow(attention)
ax.set_xticks(range(len(in_tokens)))
ax.set_yticks(range(len(translated_tokens)))
labels = [label.decode('utf-8') for label in in_tokens.numpy()]
ax.set_xticklabels(
labels, rotation=90)
labels = [label.decode('utf-8') for label in translated_tokens.numpy()]
ax.set_yticklabels(labels)
head = 0
# shape: (batch=1, num_heads, seq_len_q, seq_len_k)
attention_heads = tf.squeeze(
attention_weights['decoder_layer4_block2'], 0)
attention = attention_heads[head]
attention.shape
TensorShape([10, 11])
in_tokens = tf.convert_to_tensor([sentence])
in_tokens = tokenizers.pt.tokenize(in_tokens).to_tensor()
in_tokens = tokenizers.pt.lookup(in_tokens)[0]
in_tokens
<tf.Tensor: shape=(11,), dtype=string, numpy=
array([b'[START]', b'este', b'e', b'o', b'primeiro', b'livro', b'que',
b'eu', b'fiz', b'.', b'[END]'], dtype=object)>
translated_tokens
<tf.Tensor: shape=(11,), dtype=string, numpy=
array([b'[START]', b'this', b'is', b'the', b'first', b'book', b'that',
b'i', b'did', b'.', b'[END]'], dtype=object)>
plot_attention_head(in_tokens, translated_tokens, attention)

def plot_attention_weights(sentence, translated_tokens, attention_heads):
in_tokens = tf.convert_to_tensor([sentence])
in_tokens = tokenizers.pt.tokenize(in_tokens).to_tensor()
in_tokens = tokenizers.pt.lookup(in_tokens)[0]
in_tokens
fig = plt.figure(figsize=(16, 8))
for h, head in enumerate(attention_heads):
ax = fig.add_subplot(2, 4, h+1)
plot_attention_head(in_tokens, translated_tokens, head)
ax.set_xlabel(f'Head {h+1}')
plt.tight_layout()
plt.show()
plot_attention_weights(sentence, translated_tokens,
attention_weights['decoder_layer4_block2'][0])

Model dobrze sobie radzi z nieznanymi słowami. Ani „triceratops” ani „encyklopedia” nie znajdują się w wejściowym zbiorze danych, a model prawie uczy się je transliterować, nawet bez wspólnego słownictwa:
sentence = "Eu li sobre triceratops na enciclopédia."
ground_truth = "I read about triceratops in the encyclopedia."
translated_text, translated_tokens, attention_weights = translator(
tf.constant(sentence))
print_translation(sentence, translated_text, ground_truth)
plot_attention_weights(sentence, translated_tokens,
attention_weights['decoder_layer4_block2'][0])
Input: : Eu li sobre triceratops na enciclopédia. Prediction : i read about trigatotys in the encyclopedia . Ground truth : I read about triceratops in the encyclopedia.

Eksport
Ten model wnioskowania działa, więc następnie wyeksportujesz go jako tf.saved_model .
Aby to zrobić, zapakuj go w kolejną tf.Module , tym razem z tf.function w metodzie __call__ :
class ExportTranslator(tf.Module):
def __init__(self, translator):
self.translator = translator
@tf.function(input_signature=[tf.TensorSpec(shape=[], dtype=tf.string)])
def __call__(self, sentence):
(result,
tokens,
attention_weights) = self.translator(sentence, max_length=100)
return result
W powyższej tf.function jest tylko zdanie wyjściowe. Dzięki nieścisłemu wykonywaniu w tf.function wszelkie niepotrzebne wartości nigdy nie są obliczane.
translator = ExportTranslator(translator)
Ponieważ model dekoduje przewidywania za pomocą tf.argmax , przewidywania są deterministyczne. Oryginalny model i jeden ponownie załadowany z jego SavedModel powinny dawać identyczne prognozy:
translator("este é o primeiro livro que eu fiz.").numpy()
b'this is the first book that i did .'
tf.saved_model.save(translator, export_dir='translator')
2022-02-04 13:19:17.308292: W tensorflow/python/util/util.cc:368] Sets are not currently considered sequences, but this may change in the future, so consider avoiding using them. WARNING:absl:Found untraced functions such as embedding_4_layer_call_fn, embedding_4_layer_call_and_return_conditional_losses, dropout_37_layer_call_fn, dropout_37_layer_call_and_return_conditional_losses, embedding_5_layer_call_fn while saving (showing 5 of 224). These functions will not be directly callable after loading.
reloaded = tf.saved_model.load('translator')
reloaded("este é o primeiro livro que eu fiz.").numpy()
b'this is the first book that i did .'
Streszczenie
W tym samouczku nauczyłeś się kodowania pozycyjnego, uwagi wielogłowicowej, znaczenia maskowania i tworzenia transformatora.
Spróbuj użyć innego zestawu danych do trenowania transformatora. Możesz również utworzyć transformator bazowy lub transformator XL, zmieniając powyższe hiperparametry. Możesz również użyć zdefiniowanych tutaj warstw do tworzenia BERT i trenowania najnowocześniejszych modeli. Co więcej, możesz zaimplementować wyszukiwanie wiązki, aby uzyskać lepsze prognozy.