
Copyright 2021 Autorzy TF-Agents.
| | |  Wyświetl źródło na GitHub Wyświetl źródło na GitHub | |
Wstęp
Ten przykład pokazuje, jak trenować Miękkie Aktor krytyk środka na Minitaur środowiska.
Jeśli pracował przez DQN Colab to powinien czuć się bardzo znajome. Godne uwagi zmiany obejmują:
- Zmiana agenta z DQN na SAC.
- Szkolenie na Minitaur, które jest znacznie bardziej złożonym środowiskiem niż CartPole. Środowisko Minitaur ma na celu wytrenowanie czworonożnego robota do poruszania się do przodu.
- Korzystanie z interfejsu TF-Agents Actor-Learner API do rozproszonego uczenia się przez wzmacnianie.
Interfejs API obsługuje zarówno rozproszone zbieranie danych przy użyciu bufora odtwarzania doświadczeń i kontenera zmiennych (serwer parametrów), jak i rozproszone uczenie na wielu urządzeniach. Interfejs API został zaprojektowany tak, aby był bardzo prosty i modułowy. Wykorzystujemy Reverb zarówno bufora powtórek i zmiennym pojemnika i TF DistributionStrategy API dla rozproszonych treningu na GPU i TPU.
Jeśli nie zainstalowałeś następujących zależności, uruchom:
sudo apt-get updatesudo apt-get install -y xvfb ffmpegpip install 'imageio==2.4.0'pip install matplotlibpip install tf-agents[reverb]pip install pybullet
Ustawiać
Najpierw zaimportujemy różne potrzebne nam narzędzia.
import base64
import imageio
import IPython
import matplotlib.pyplot as plt
import os
import reverb
import tempfile
import PIL.Image
import tensorflow as tf
from tf_agents.agents.ddpg import critic_network
from tf_agents.agents.sac import sac_agent
from tf_agents.agents.sac import tanh_normal_projection_network
from tf_agents.environments import suite_pybullet
from tf_agents.metrics import py_metrics
from tf_agents.networks import actor_distribution_network
from tf_agents.policies import greedy_policy
from tf_agents.policies import py_tf_eager_policy
from tf_agents.policies import random_py_policy
from tf_agents.replay_buffers import reverb_replay_buffer
from tf_agents.replay_buffers import reverb_utils
from tf_agents.train import actor
from tf_agents.train import learner
from tf_agents.train import triggers
from tf_agents.train.utils import spec_utils
from tf_agents.train.utils import strategy_utils
from tf_agents.train.utils import train_utils
tempdir = tempfile.gettempdir()
Hiperparametry
env_name = "MinitaurBulletEnv-v0" # @param {type:"string"}
# Use "num_iterations = 1e6" for better results (2 hrs)
# 1e5 is just so this doesn't take too long (1 hr)
num_iterations = 100000 # @param {type:"integer"}
initial_collect_steps = 10000 # @param {type:"integer"}
collect_steps_per_iteration = 1 # @param {type:"integer"}
replay_buffer_capacity = 10000 # @param {type:"integer"}
batch_size = 256 # @param {type:"integer"}
critic_learning_rate = 3e-4 # @param {type:"number"}
actor_learning_rate = 3e-4 # @param {type:"number"}
alpha_learning_rate = 3e-4 # @param {type:"number"}
target_update_tau = 0.005 # @param {type:"number"}
target_update_period = 1 # @param {type:"number"}
gamma = 0.99 # @param {type:"number"}
reward_scale_factor = 1.0 # @param {type:"number"}
actor_fc_layer_params = (256, 256)
critic_joint_fc_layer_params = (256, 256)
log_interval = 5000 # @param {type:"integer"}
num_eval_episodes = 20 # @param {type:"integer"}
eval_interval = 10000 # @param {type:"integer"}
policy_save_interval = 5000 # @param {type:"integer"}
Środowisko
Środowiska w RL reprezentują zadanie lub problem, który próbujemy rozwiązać. Standardowe środowisk mogą być łatwo tworzone w TF-agentów korzystających z suites . Mamy różne suites do ładowania środowiska ze źródeł takich jak OpenAI Siłownia, Atari, DM Kontroli itd podano nazwę środowisko ciąg.
Teraz załadujmy środowisko Minituar z pakietu Pybullet.
env = suite_pybullet.load(env_name)
env.reset()
PIL.Image.fromarray(env.render())
pybullet build time: Oct 11 2021 20:59:00
/tmpfs/src/tf_docs_env/lib/python3.7/site-packages/gym/spaces/box.py:74: UserWarning: WARN: Box bound precision lowered by casting to float32
"Box bound precision lowered by casting to {}".format(self.dtype)
current_dir=/tmpfs/src/tf_docs_env/lib/python3.7/site-packages/pybullet_envs/bullet
urdf_root=/tmpfs/src/tf_docs_env/lib/python3.7/site-packages/pybullet_data
W tym środowisku celem agenta jest wytrenowanie zasad, które będą kontrolować robota Minitaur i sprawić, by poruszał się do przodu tak szybko, jak to możliwe. Odcinki trwają 1000 kroków, a zwrot będzie sumą nagród za cały odcinek.
Wygląd Chodźmy na informacje środowisko zapewnia jako observation której polityka będzie wykorzystać do generowania actions .
print('Observation Spec:')
print(env.time_step_spec().observation)
print('Action Spec:')
print(env.action_spec())
Observation Spec:
BoundedArraySpec(shape=(28,), dtype=dtype('float32'), name='observation', minimum=[ -3.1515927 -3.1515927 -3.1515927 -3.1515927 -3.1515927
-3.1515927 -3.1515927 -3.1515927 -167.72488 -167.72488
-167.72488 -167.72488 -167.72488 -167.72488 -167.72488
-167.72488 -5.71 -5.71 -5.71 -5.71
-5.71 -5.71 -5.71 -5.71 -1.01
-1.01 -1.01 -1.01 ], maximum=[ 3.1515927 3.1515927 3.1515927 3.1515927 3.1515927 3.1515927
3.1515927 3.1515927 167.72488 167.72488 167.72488 167.72488
167.72488 167.72488 167.72488 167.72488 5.71 5.71
5.71 5.71 5.71 5.71 5.71 5.71
1.01 1.01 1.01 1.01 ])
Action Spec:
BoundedArraySpec(shape=(8,), dtype=dtype('float32'), name='action', minimum=-1.0, maximum=1.0)
Obserwacja jest dość złożona. Otrzymujemy 28 wartości reprezentujących kąty, prędkości i momenty dla wszystkich silników. W zamian za to środowisko oczekuje 8 wartości działań pomiędzy [-1, 1] . To są pożądane kąty silnika.
Zwykle tworzymy dwa środowiska: jedno do zbierania danych podczas szkolenia, drugie do oceny. Środowiska są napisane w czystym Pythonie i używają tablic numpy, które są bezpośrednio wykorzystywane przez interfejs API Actor Learner.
collect_env = suite_pybullet.load(env_name)
eval_env = suite_pybullet.load(env_name)
urdf_root=/tmpfs/src/tf_docs_env/lib/python3.7/site-packages/pybullet_data urdf_root=/tmpfs/src/tf_docs_env/lib/python3.7/site-packages/pybullet_data
Strategia dystrybucji
Używamy interfejsu DistributionStrategy API, aby umożliwić uruchamianie obliczeń kroków pociągu na wielu urządzeniach, takich jak wiele procesorów graficznych lub TPU, przy użyciu równoległości danych. Krok pociągu:
- Otrzymuje partię danych treningowych
- Dzieli to na urządzenia
- Oblicza krok do przodu
- Agreguje i oblicza ŚREDNĄ stratę
- Oblicza krok wstecz i wykonuje aktualizację zmiennej gradientu
Dzięki interfejsom API TF-Agents Learner i DistributionStrategy API można łatwo przełączać się między uruchamianiem etapu pociągu na procesorach graficznych (przy użyciu MirroredStrategy) na TPU (przy użyciu TPUStrategy) bez zmiany żadnej z poniższych logiki szkolenia.
Włączanie GPU
Jeśli chcesz spróbować pracy na procesorze GPU, musisz najpierw włączyć procesory GPU w notebooku:
- Przejdź do Edycja → Ustawienia notebooka
- Wybierz GPU z listy rozwijanej Akcelerator sprzętowy
Wybór strategii
Użyj strategy_utils wygenerować strategii. Pod maską przekazując parametr:
-
use_gpu = Falsepowracatf.distribute.get_strategy(), który wykorzystuje procesor -
use_gpu = Truena przywrócenietf.distribute.MirroredStrategy(), która wykorzystuje wszystkie karty graficzne, które są widoczne na jednej maszynie TensorFlow
use_gpu = True
strategy = strategy_utils.get_strategy(tpu=False, use_gpu=use_gpu)
INFO:tensorflow:Using MirroredStrategy with devices ('/job:localhost/replica:0/task:0/device:GPU:0',)
INFO:tensorflow:Using MirroredStrategy with devices ('/job:localhost/replica:0/task:0/device:GPU:0',)
Wszystkie zmienne i agenci muszą być tworzone pod strategy.scope() , jak zobaczysz poniżej.
Agent
Aby utworzyć agenta SAC, najpierw musimy stworzyć sieci, które będzie on szkolił. SAC jest agentem krytycznym dla aktorów, więc będziemy potrzebować dwóch sieci.
Krytyk dadzą nam oszacowania wartości dla Q(s,a) . Oznacza to, że otrzyma jako dane wejściowe obserwację i działanie, i da nam oszacowanie, jak dobre było to działanie dla danego stanu.
observation_spec, action_spec, time_step_spec = (
spec_utils.get_tensor_specs(collect_env))
with strategy.scope():
critic_net = critic_network.CriticNetwork(
(observation_spec, action_spec),
observation_fc_layer_params=None,
action_fc_layer_params=None,
joint_fc_layer_params=critic_joint_fc_layer_params,
kernel_initializer='glorot_uniform',
last_kernel_initializer='glorot_uniform')
Będziemy korzystać z tego krytyk szkolić się actor sieć, która pozwoli nam na generowanie działań podanych obserwacji.
ActorNetwork przewidzi parametrów dla tanh-zgniecione MultivariateNormalDiag dystrybucji. Ten rozkład będzie następnie próbkowany, uzależniony od bieżącej obserwacji, ilekroć będziemy potrzebować wygenerować działania.
with strategy.scope():
actor_net = actor_distribution_network.ActorDistributionNetwork(
observation_spec,
action_spec,
fc_layer_params=actor_fc_layer_params,
continuous_projection_net=(
tanh_normal_projection_network.TanhNormalProjectionNetwork))
Mając te sieci pod ręką, możemy teraz utworzyć instancję agenta.
with strategy.scope():
train_step = train_utils.create_train_step()
tf_agent = sac_agent.SacAgent(
time_step_spec,
action_spec,
actor_network=actor_net,
critic_network=critic_net,
actor_optimizer=tf.keras.optimizers.Adam(
learning_rate=actor_learning_rate),
critic_optimizer=tf.keras.optimizers.Adam(
learning_rate=critic_learning_rate),
alpha_optimizer=tf.keras.optimizers.Adam(
learning_rate=alpha_learning_rate),
target_update_tau=target_update_tau,
target_update_period=target_update_period,
td_errors_loss_fn=tf.math.squared_difference,
gamma=gamma,
reward_scale_factor=reward_scale_factor,
train_step_counter=train_step)
tf_agent.initialize()
Bufor powtórek
W celu śledzenia danych zebranych ze środowiska użyjemy Reverb , sprawny, rozszerzalny i łatwy w obsłudze system powtórka przez Deepmind. Przechowuje dane o doświadczeniach zebrane przez Aktorów i wykorzystane przez Uczącego się podczas szkolenia.
W tym poradniku, to jest mniej ważne niż max_size - ale w rozproszonym otoczeniu z kolekcji i szkolenia asynchronicznym, prawdopodobnie będziesz chciał eksperymentować z rate_limiters.SampleToInsertRatio używając gdzieś samples_per_insert między 2 a 1000. Na przykład:
rate_limiter=reverb.rate_limiters.SampleToInsertRatio(samples_per_insert=3.0, min_size_to_sample=3, error_buffer=3.0)
table_name = 'uniform_table'
table = reverb.Table(
table_name,
max_size=replay_buffer_capacity,
sampler=reverb.selectors.Uniform(),
remover=reverb.selectors.Fifo(),
rate_limiter=reverb.rate_limiters.MinSize(1))
reverb_server = reverb.Server([table])
[reverb/cc/platform/tfrecord_checkpointer.cc:150] Initializing TFRecordCheckpointer in /tmp/tmpl579aohk. [reverb/cc/platform/tfrecord_checkpointer.cc:386] Loading latest checkpoint from /tmp/tmpl579aohk [reverb/cc/platform/default/server.cc:71] Started replay server on port 15652
Bufor odtwarzania jest wykonana przy użyciu specyfikacje opisujące tensory, które mają być przechowywane, które mogą być otrzymane z użyciem środka tf_agent.collect_data_spec .
Ponieważ środek SAC potrzebuje zarówno bieżącego i następnego obserwację do obliczenia strat, ustawiamy sequence_length=2 .
reverb_replay = reverb_replay_buffer.ReverbReplayBuffer(
tf_agent.collect_data_spec,
sequence_length=2,
table_name=table_name,
local_server=reverb_server)
Teraz generujemy zestaw danych TensorFlow z bufora odtwarzania Reverb. Przekażemy to Uczniowi, aby wypróbować doświadczenia do szkolenia.
dataset = reverb_replay.as_dataset(
sample_batch_size=batch_size, num_steps=2).prefetch(50)
experience_dataset_fn = lambda: dataset
Zasady
W TF-pełnomocników, polityka stanowią standardową koncepcję polityki w RL: dali time_step wytwarzają działanie lub dystrybucję nad działaniami. Główną metodą jest policy_step = policy.step(time_step) gdzie policy_step to nazwana krotki PolicyStep(action, state, info) . policy_step.action jest action , które należy stosować w środowisku, state reprezentuje stan na stanowych (RNN) polityk i info mogą zawierać informacje pomocnicze, takie jak prawdopodobieństw dziennika działań.
Agenci zawierają dwie zasady:
-
agent.policy- Polityka główny, który jest używany do oceny i wdrożenia. -
agent.collect_policy- Druga polityka, który służy do zbierania danych.
tf_eval_policy = tf_agent.policy
eval_policy = py_tf_eager_policy.PyTFEagerPolicy(
tf_eval_policy, use_tf_function=True)
tf_collect_policy = tf_agent.collect_policy
collect_policy = py_tf_eager_policy.PyTFEagerPolicy(
tf_collect_policy, use_tf_function=True)
Polityki można tworzyć niezależnie od agentów. Na przykład za pomocą tf_agents.policies.random_py_policy stworzyć politykę, która będzie losowo wybrać akcję dla każdego time_step.
random_policy = random_py_policy.RandomPyPolicy(
collect_env.time_step_spec(), collect_env.action_spec())
Aktorzy
Aktor zarządza interakcjami między polityką a środowiskiem.
- Składniki Aktor zawierać instancję środowiska (jak
py_environment) oraz kopię zmiennych polityki. - Każdy proces roboczy aktora uruchamia sekwencję kroków zbierania danych, biorąc pod uwagę lokalne wartości zmiennych zasad.
- Zmienne aktualizacje są wykonywane bezpośrednio przy użyciu zmiennej instancji klienta pojemnik w skrypcie szkoleniowym przed wywołaniem
actor.run(). - Obserwowane doświadczenie jest zapisywane w buforze powtórek na każdym etapie zbierania danych.
Gdy aktorzy wykonują kroki zbierania danych, przekazują trajektorie (stan, działanie, nagroda) do obserwatora, który buforuje je i zapisuje w systemie odtwarzania pogłosu.
Jesteśmy przechowywania trajektorie dla ramek [(t0, t1) (t1, t2) (T2, T3), ...] ponieważ stride_length=1 .
rb_observer = reverb_utils.ReverbAddTrajectoryObserver(
reverb_replay.py_client,
table_name,
sequence_length=2,
stride_length=1)
Tworzymy aktora z losową polityką i zbieramy doświadczenia, aby zapełnić bufor powtórek.
initial_collect_actor = actor.Actor(
collect_env,
random_policy,
train_step,
steps_per_run=initial_collect_steps,
observers=[rb_observer])
initial_collect_actor.run()
Utwórz wystąpienie aktora z zasadą zbierania, aby zebrać więcej doświadczeń podczas szkolenia.
env_step_metric = py_metrics.EnvironmentSteps()
collect_actor = actor.Actor(
collect_env,
collect_policy,
train_step,
steps_per_run=1,
metrics=actor.collect_metrics(10),
summary_dir=os.path.join(tempdir, learner.TRAIN_DIR),
observers=[rb_observer, env_step_metric])
Stwórz aktora, który będzie używany do oceny polityki podczas szkolenia. Mijamy w actor.eval_metrics(num_eval_episodes) do metryk później zalogować.
eval_actor = actor.Actor(
eval_env,
eval_policy,
train_step,
episodes_per_run=num_eval_episodes,
metrics=actor.eval_metrics(num_eval_episodes),
summary_dir=os.path.join(tempdir, 'eval'),
)
Uczniowie
Komponent Learner zawiera agenta i wykonuje aktualizacje stopni gradientu zmiennych strategii przy użyciu danych doświadczenia z bufora odtwarzania. Po co najmniej jednym etapie uczenia uczestnik może wypchnąć nowy zestaw wartości zmiennych do kontenera zmiennych.
saved_model_dir = os.path.join(tempdir, learner.POLICY_SAVED_MODEL_DIR)
# Triggers to save the agent's policy checkpoints.
learning_triggers = [
triggers.PolicySavedModelTrigger(
saved_model_dir,
tf_agent,
train_step,
interval=policy_save_interval),
triggers.StepPerSecondLogTrigger(train_step, interval=1000),
]
agent_learner = learner.Learner(
tempdir,
train_step,
tf_agent,
experience_dataset_fn,
triggers=learning_triggers,
strategy=strategy)
WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow_probability/python/distributions/distribution.py:342: calling MultivariateNormalDiag.__init__ (from tensorflow_probability.python.distributions.mvn_diag) with scale_identity_multiplier is deprecated and will be removed after 2020-01-01. Instructions for updating: `scale_identity_multiplier` is deprecated; please combine it into `scale_diag` directly instead. WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow_probability/python/distributions/distribution.py:342: calling MultivariateNormalDiag.__init__ (from tensorflow_probability.python.distributions.mvn_diag) with scale_identity_multiplier is deprecated and will be removed after 2020-01-01. Instructions for updating: `scale_identity_multiplier` is deprecated; please combine it into `scale_diag` directly instead. WARNING:absl:WARNING: Could not serialize policy.distribution() for policy "<tf_agents.policies.actor_policy.ActorPolicy object at 0x7fe64b86ce90>". Calling saved_model.distribution() will raise the following assertion error: missing a required argument: 'distribution' 2021-12-01 12:19:19.139118: W tensorflow/python/util/util.cc:368] Sets are not currently considered sequences, but this may change in the future, so consider avoiding using them. WARNING:absl:WARNING: Could not serialize policy.distribution() for policy "<tf_agents.policies.actor_policy.ActorPolicy object at 0x7fe64b86ce90>". Calling saved_model.distribution() will raise the following assertion error: missing a required argument: 'distribution' WARNING:absl:Function `function_with_signature` contains input name(s) 0/step_type, 0/reward, 0/discount, 0/observation with unsupported characters which will be renamed to step_type, reward, discount, observation in the SavedModel. WARNING:absl:WARNING: Could not serialize policy.distribution() for policy "<tf_agents.policies.actor_policy.ActorPolicy object at 0x7fe64b86ce90>". Calling saved_model.distribution() will raise the following assertion error: missing a required argument: 'distribution' WARNING:absl:Found untraced functions such as ActorDistributionNetwork_layer_call_fn, ActorDistributionNetwork_layer_call_and_return_conditional_losses, EncodingNetwork_layer_call_fn, EncodingNetwork_layer_call_and_return_conditional_losses, TanhNormalProjectionNetwork_layer_call_fn while saving (showing 5 of 35). These functions will not be directly callable after loading. INFO:tensorflow:Assets written to: /tmp/policies/policy/assets INFO:tensorflow:Assets written to: /tmp/policies/policy/assets WARNING:absl:Function `function_with_signature` contains input name(s) 0/step_type, 0/reward, 0/discount, 0/observation with unsupported characters which will be renamed to step_type, reward, discount, observation in the SavedModel. WARNING:absl:WARNING: Could not serialize policy.distribution() for policy "<tf_agents.policies.actor_policy.ActorPolicy object at 0x7fe64b86ce90>". Calling saved_model.distribution() will raise the following assertion error: missing a required argument: 'distribution' WARNING:absl:Found untraced functions such as ActorDistributionNetwork_layer_call_fn, ActorDistributionNetwork_layer_call_and_return_conditional_losses, EncodingNetwork_layer_call_fn, EncodingNetwork_layer_call_and_return_conditional_losses, TanhNormalProjectionNetwork_layer_call_fn while saving (showing 5 of 35). These functions will not be directly callable after loading. INFO:tensorflow:Assets written to: /tmp/policies/collect_policy/assets INFO:tensorflow:Assets written to: /tmp/policies/collect_policy/assets WARNING:absl:Function `function_with_signature` contains input name(s) 0/step_type, 0/reward, 0/discount, 0/observation with unsupported characters which will be renamed to step_type, reward, discount, observation in the SavedModel. WARNING:absl:Found untraced functions such as ActorDistributionNetwork_layer_call_fn, ActorDistributionNetwork_layer_call_and_return_conditional_losses, EncodingNetwork_layer_call_fn, EncodingNetwork_layer_call_and_return_conditional_losses, TanhNormalProjectionNetwork_layer_call_fn while saving (showing 5 of 35). These functions will not be directly callable after loading. INFO:tensorflow:Assets written to: /tmp/policies/greedy_policy/assets /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow/python/saved_model/nested_structure_coder.py:561: UserWarning: Encoding a StructuredValue with type tf_agents.policies.greedy_policy.DeterministicWithLogProb_ACTTypeSpec; loading this StructuredValue will require that this type be imported and registered. "imported and registered." % type_spec_class_name) INFO:tensorflow:Assets written to: /tmp/policies/greedy_policy/assets WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tf_agents/train/learner.py:151: StrategyBase.experimental_distribute_datasets_from_function (from tensorflow.python.distribute.distribute_lib) is deprecated and will be removed in a future version. Instructions for updating: rename to distribute_datasets_from_function WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tf_agents/train/learner.py:151: StrategyBase.experimental_distribute_datasets_from_function (from tensorflow.python.distribute.distribute_lib) is deprecated and will be removed in a future version. Instructions for updating: rename to distribute_datasets_from_function
Metryki i ocena
Mamy instancja eval aktor actor.eval_metrics powyżej, która tworzy najczęściej używanych wskaźników podczas oceny polityki:
- Średni zwrot. Zwrot to suma nagród uzyskanych podczas prowadzenia polisy w środowisku dla odcinka, i zwykle uśredniamy to dla kilku odcinków.
- Średnia długość odcinka.
Uruchamiamy aktora, aby wygenerować te metryki.
def get_eval_metrics():
eval_actor.run()
results = {}
for metric in eval_actor.metrics:
results[metric.name] = metric.result()
return results
metrics = get_eval_metrics()
def log_eval_metrics(step, metrics):
eval_results = (', ').join(
'{} = {:.6f}'.format(name, result) for name, result in metrics.items())
print('step = {0}: {1}'.format(step, eval_results))
log_eval_metrics(0, metrics)
step = 0: AverageReturn = -0.963870, AverageEpisodeLength = 204.100006
Sprawdź moduł metryki dla innych standardowych implementacji różnych metryk.
Szkolenie agenta
Pętla treningowa obejmuje zarówno zbieranie danych z otoczenia, jak i optymalizację sieci agenta. Po drodze będziemy od czasu do czasu oceniać politykę agenta, aby zobaczyć, jak sobie radzimy.
try:
%%time
except:
pass
# Reset the train step
tf_agent.train_step_counter.assign(0)
# Evaluate the agent's policy once before training.
avg_return = get_eval_metrics()["AverageReturn"]
returns = [avg_return]
for _ in range(num_iterations):
# Training.
collect_actor.run()
loss_info = agent_learner.run(iterations=1)
# Evaluating.
step = agent_learner.train_step_numpy
if eval_interval and step % eval_interval == 0:
metrics = get_eval_metrics()
log_eval_metrics(step, metrics)
returns.append(metrics["AverageReturn"])
if log_interval and step % log_interval == 0:
print('step = {0}: loss = {1}'.format(step, loss_info.loss.numpy()))
rb_observer.close()
reverb_server.stop()
[reverb/cc/client.cc:163] Sampler and server are owned by the same process (14227) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (14227) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (14227) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (14227) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (14227) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (14227) so Table uniform_table is accessed directly without gRPC. step = 5000: loss = -50.77360153198242 step = 10000: AverageReturn = -0.734191, AverageEpisodeLength = 299.399994 step = 10000: loss = -57.17308044433594 step = 15000: loss = -31.02552032470703 step = 20000: AverageReturn = -1.243302, AverageEpisodeLength = 432.200012 step = 20000: loss = -20.673084259033203 step = 25000: loss = -12.919441223144531 step = 30000: AverageReturn = -0.205654, AverageEpisodeLength = 280.049988 step = 30000: loss = -5.420497417449951 step = 35000: loss = -4.320608139038086 step = 40000: AverageReturn = -1.193502, AverageEpisodeLength = 378.000000 step = 40000: loss = -4.375732421875 step = 45000: loss = -3.0430049896240234 step = 50000: AverageReturn = -1.299686, AverageEpisodeLength = 482.549988 step = 50000: loss = -0.8907612562179565 step = 55000: loss = 1.2096503973007202 step = 60000: AverageReturn = -0.949927, AverageEpisodeLength = 365.899994 step = 60000: loss = 1.8157628774642944 step = 65000: loss = -4.9070353507995605 step = 70000: AverageReturn = -0.644635, AverageEpisodeLength = 506.399994 step = 70000: loss = -0.33166465163230896 step = 75000: loss = -0.41273507475852966 step = 80000: AverageReturn = 0.331935, AverageEpisodeLength = 604.299988 step = 80000: loss = 1.5354682207107544 step = 85000: loss = -2.058459997177124 step = 90000: AverageReturn = 0.292840, AverageEpisodeLength = 520.450012 step = 90000: loss = 1.2136361598968506 step = 95000: loss = -1.810737133026123 step = 100000: AverageReturn = 0.835265, AverageEpisodeLength = 515.349976 step = 100000: loss = -2.6997461318969727 [reverb/cc/platform/default/server.cc:84] Shutting down replay server
Wyobrażanie sobie
Działki
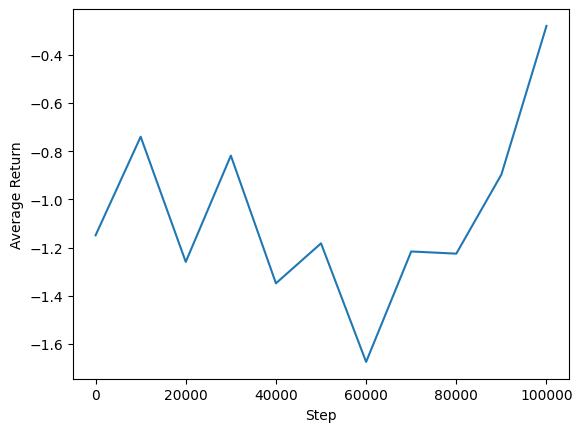
Możemy wykreślić średni zwrot w porównaniu z globalnymi krokami, aby zobaczyć wydajność naszego agenta. W Minitaur funkcja nagroda jest oparty na jak daleko minitaur spacery w 1000 krokach i penalizuje wydatku energetycznego.
steps = range(0, num_iterations + 1, eval_interval)
plt.plot(steps, returns)
plt.ylabel('Average Return')
plt.xlabel('Step')
plt.ylim()
(-1.4064332604408265, 0.9420127034187317)
Filmy
Pomocna jest wizualizacja wydajności agenta poprzez renderowanie środowiska na każdym kroku. Zanim to zrobimy, stwórzmy najpierw funkcję do osadzania filmów w tej kolaboracji.
def embed_mp4(filename):
"""Embeds an mp4 file in the notebook."""
video = open(filename,'rb').read()
b64 = base64.b64encode(video)
tag = '''
<video width="640" height="480" controls>
<source src="data:video/mp4;base64,{0}" type="video/mp4">
Your browser does not support the video tag.
</video>'''.format(b64.decode())
return IPython.display.HTML(tag)
Poniższy kod wizualizuje politykę agenta dla kilku odcinków:
num_episodes = 3
video_filename = 'sac_minitaur.mp4'
with imageio.get_writer(video_filename, fps=60) as video:
for _ in range(num_episodes):
time_step = eval_env.reset()
video.append_data(eval_env.render())
while not time_step.is_last():
action_step = eval_actor.policy.action(time_step)
time_step = eval_env.step(action_step.action)
video.append_data(eval_env.render())
embed_mp4(video_filename)