
Telif Hakkı 2021 TF-Agents Yazarları.
Başlamak
| | |  Kaynağı GitHub'da görüntüleyin Kaynağı GitHub'da görüntüleyin | |
Bu eğitici, eylemlerin (silahların) kendi özelliklerine sahip olduğu, özelliklerle temsil edilen filmlerin bir listesi (tür, yayın yılı, ...).
Önkoşul
Bu okuyucu, TF-Agents Bandit kütüphanesi ile biraz aşina olduğu kabul edilir, özellikle, içinden işleme TF-Ajanlar Bandits öğretici eğitimde okuma önce.
Kol Özelliklerine Sahip Çok Silahlı Eşkıyalar
"Klasik" Bağlamsal Çok Silahlı Haydutlar ayarında, bir ajan her zaman adımında bir bağlam vektörü (diğer bir deyişle gözlem) alır ve kümülatif ödülünü en üst düzeye çıkarmak için sınırlı sayıda numaralandırılmış eylemler (kollar) arasından seçim yapmak zorundadır.
Şimdi, bir aracının bir kullanıcıya izlenecek bir sonraki filmi önerdiği senaryoyu düşünün. Her karar verilmesi gerektiğinde, aracı kullanıcı hakkında bazı bilgileri (izleme geçmişi, tür tercihi, vb...) ve ayrıca seçim yapabileceği filmlerin listesini bağlam olarak alır.
Biz bağlam olarak kullanıcı bilgilerini alarak bu sorunu formüle deneyebilirsiniz ve silah olacağını movie_1, movie_2, ..., movie_K , ancak bu yaklaşım birden eksiklikleri vardır:
- Eylemlerin sayısı sistemdeki tüm filmler olmalıdır ve yeni bir film eklemek zahmetlidir.
- Ajan her film için bir model öğrenmek zorundadır.
- Filmler arasındaki benzerlik dikkate alınmaz.
Filmleri numaralandırmak yerine daha sezgisel bir şey yapabiliriz: filmleri tür, uzunluk, oyuncu kadrosu, derecelendirme, yıl vb. dahil olmak üzere bir dizi özellikle temsil edebiliriz. Bu yaklaşımın avantajları çok çeşitlidir:
- Filmler arasında genelleme.
- Aracı, kullanıcı ve film özellikleriyle ödülü modelleyen yalnızca bir ödül işlevi öğrenir.
- Sistemden çıkarılması veya yeni filmlerin sisteme eklenmesi kolaydır.
Bu yeni ayarda, eylemlerin sayısı her zaman adımında aynı olmak zorunda bile değil.
TF-Ajanlarında Kol Başına Eşkıyalar
TF-Agents Haydut paketi, kol başına kılıf için de kullanılabilecek şekilde geliştirilmiştir. Kol başına ortamlar vardır ve ayrıca ilkelerin ve aracıların çoğu kol başına modunda çalışabilir.
Bir örnek kodlamaya geçmeden önce, gerekli ithalatlara ihtiyacımız var.
Kurulum
pip install tf-agents
ithalat
import functools
import matplotlib.pyplot as plt
import numpy as np
import tensorflow as tf
from tf_agents.bandits.agents import lin_ucb_agent
from tf_agents.bandits.environments import stationary_stochastic_per_arm_py_environment as p_a_env
from tf_agents.bandits.metrics import tf_metrics as tf_bandit_metrics
from tf_agents.drivers import dynamic_step_driver
from tf_agents.environments import tf_py_environment
from tf_agents.replay_buffers import tf_uniform_replay_buffer
from tf_agents.specs import tensor_spec
from tf_agents.trajectories import time_step as ts
nest = tf.nest
Parametreler -- Etrafta Oynamaktan Çekinmeyin
# The dimension of the global features.
GLOBAL_DIM = 40
# The elements of the global feature will be integers in [-GLOBAL_BOUND, GLOBAL_BOUND).
GLOBAL_BOUND = 10
# The dimension of the per-arm features.
PER_ARM_DIM = 50
# The elements of the PER-ARM feature will be integers in [-PER_ARM_BOUND, PER_ARM_BOUND).
PER_ARM_BOUND = 6
# The variance of the Gaussian distribution that generates the rewards.
VARIANCE = 100.0
# The elements of the linear reward parameter will be integers in [-PARAM_BOUND, PARAM_BOUND).
PARAM_BOUND = 10
NUM_ACTIONS = 70
BATCH_SIZE = 20
# Parameter for linear reward function acting on the
# concatenation of global and per-arm features.
reward_param = list(np.random.randint(
-PARAM_BOUND, PARAM_BOUND, [GLOBAL_DIM + PER_ARM_DIM]))
Kol Başına Basit Bir Ortam
Sabit stokastik ortam, diğer açıklandığı öğretici , başına kol muadili vardır.
Kol başına ortamı başlatmak için, aşağıdakileri oluşturan işlevler tanımlanmalıdır.
- Küresel ve başına kol özellikleri: Bu işlevler hiçbir giriş parametreleri varsa ve çağrıldığında bir (global veya başına kol) tek özellik vektörü oluşturur.
- ödüllendirir: Bu fonksiyon küresel ve başına kol özelliği vektörü birleştirme parametre olarak alır ve bir ödül üretir. Temel olarak bu, ajanın "tahmin etmesi" gereken işlevdir. Her kol durumunda ödül fonksiyonunun her kol için aynı olduğunu burada belirtmekte fayda var. Bu, ajanın her bir kol için ödül fonksiyonlarını bağımsız olarak tahmin etmesi gereken klasik haydut vakasından temel bir farktır.
def global_context_sampling_fn():
"""This function generates a single global observation vector."""
return np.random.randint(
-GLOBAL_BOUND, GLOBAL_BOUND, [GLOBAL_DIM]).astype(np.float32)
def per_arm_context_sampling_fn():
""""This function generates a single per-arm observation vector."""
return np.random.randint(
-PER_ARM_BOUND, PER_ARM_BOUND, [PER_ARM_DIM]).astype(np.float32)
def linear_normal_reward_fn(x):
"""This function generates a reward from the concatenated global and per-arm observations."""
mu = np.dot(x, reward_param)
return np.random.normal(mu, VARIANCE)
Şimdi ortamımızı başlatmak için donanımlıyız.
per_arm_py_env = p_a_env.StationaryStochasticPerArmPyEnvironment(
global_context_sampling_fn,
per_arm_context_sampling_fn,
NUM_ACTIONS,
linear_normal_reward_fn,
batch_size=BATCH_SIZE
)
per_arm_tf_env = tf_py_environment.TFPyEnvironment(per_arm_py_env)
Aşağıda bu ortamın ne ürettiğini kontrol edebiliriz.
print('observation spec: ', per_arm_tf_env.observation_spec())
print('\nAn observation: ', per_arm_tf_env.reset().observation)
action = tf.zeros(BATCH_SIZE, dtype=tf.int32)
time_step = per_arm_tf_env.step(action)
print('\nRewards after taking an action: ', time_step.reward)
observation spec: {'global': TensorSpec(shape=(40,), dtype=tf.float32, name=None), 'per_arm': TensorSpec(shape=(70, 50), dtype=tf.float32, name=None)}
An observation: {'global': <tf.Tensor: shape=(20, 40), dtype=float32, numpy=
array([[ -9., -4., -3., 3., 5., -9., 6., -5., 4., -8., -6.,
-1., -7., -5., 7., 8., 2., 5., -8., 0., -4., 4.,
-1., -1., -4., 6., 8., 6., 9., -5., -1., -1., 2.,
5., -1., -8., 1., 0., 0., 5.],
[ 5., 7., 0., 3., -8., -7., -5., -2., -8., -7., -7.,
-8., 5., -3., 5., 4., -5., 2., -6., -10., -4., -2.,
2., -1., -1., 8., -7., 7., 2., -3., -10., -1., -4.,
-7., 3., 4., 8., -2., 9., 5.],
[ -6., -2., -1., -1., 6., -3., 4., 9., 2., -2., 3.,
1., 0., -7., 5., 5., -8., -4., 5., 7., -10., -4.,
5., 6., 8., -10., 7., -1., -8., -8., -6., -6., 4.,
-10., -8., 3., 8., -9., -5., 8.],
[ -1., 8., -8., -7., 9., 2., -6., 8., 4., -2., 1.,
8., -4., 3., 1., -6., -9., 3., -5., 7., -9., 6.,
6., -3., 1., 2., -1., 3., 7., 4., -8., 1., 1.,
3., -4., 1., -4., -5., -9., 4.],
[ -9., 8., 9., -8., 2., 9., -1., -9., -1., 9., -8.,
-4., 1., 1., 9., 6., -6., -10., -6., 2., 6., -4.,
-7., -2., -7., -8., -4., 5., -6., -1., 8., -3., -7.,
4., -9., -9., 6., -9., 6., -2.],
[ 0., -6., -5., -8., -10., 2., -4., 9., 9., -1., 5.,
-7., -1., -3., -10., -10., 3., -2., -7., -9., -4., -8.,
-4., -1., 7., -2., -4., -4., 9., 2., -2., -8., 6.,
5., -4., 7., 0., 6., -3., 2.],
[ 8., 5., 3., 5., 9., 4., -10., -5., -4., -4., -5.,
3., 5., -4., 9., -2., -7., -6., -2., -8., -7., -10.,
0., -2., 3., 1., -10., -8., 3., 9., -5., -6., 1.,
-7., -1., 3., -7., -2., 1., -1.],
[ 3., 9., 8., 6., -2., 9., 9., 7., 0., 5., -5.,
6., 9., 3., 2., 9., 4., -1., -3., 3., -1., -4.,
-9., -1., -3., 8., 0., 4., -1., 4., -3., 4., -5.,
-3., -6., -4., 7., -9., -7., -1.],
[ 5., -1., 9., -5., 8., 7., -7., -5., 0., -4., -5.,
6., -3., -1., 7., 3., -7., -9., 6., 4., 9., 6.,
-3., 3., -2., -6., -4., -7., -5., -6., -2., -1., -9.,
-4., -9., -2., -7., -6., -3., 6.],
[ -7., 1., -8., 1., -8., -9., 5., 1., -4., -2., -5.,
3., -1., -4., -4., 5., 0., -10., -4., -1., -5., 3.,
8., -5., -4., -10., -8., -6., -10., -1., -6., 1., 7.,
8., 6., -2., -4., -9., 7., -1.],
[ -2., 3., 8., -5., 0., 5., 8., -5., 6., -8., 5.,
8., -5., -5., -5., -10., 4., 8., -4., -7., 4., -6.,
-9., -8., -5., 4., -1., -2., -7., -10., -6., -8., -6.,
3., 1., 6., 9., 6., -8., -3.],
[ 9., -6., -2., -10., 2., -8., 8., -7., -5., 8., -10.,
4., -5., 9., 7., 9., -2., -9., -5., -2., 9., 0.,
-6., 2., 4., 6., -7., -4., -5., -7., -8., -8., 8.,
-7., -1., -5., 0., -7., 7., -6.],
[ -1., -3., 1., 8., 4., 7., -1., -8., -4., 6., 9.,
5., -10., 4., -4., 5., -2., 0., 3., 4., 3., -5.,
-2., 7., 4., -4., -9., 9., -6., -5., -8., 4., -10.,
-6., 3., 0., 6., -10., 4., 3.],
[ 8., 8., -5., 0., -7., 5., -6., -8., 2., -3., -5.,
5., 0., 6., -10., 3., -4., 1., -8., -9., 6., -5.,
5., -10., 1., 0., 3., 5., 2., -9., -6., 9., 7.,
9., -10., 4., -4., -10., -5., 1.],
[ 8., 3., -5., -2., -8., -6., 6., -7., 8., 1., -8.,
0., -2., 3., -6., 0., -10., 6., -8., -2., -5., 4.,
-1., -9., -7., 3., -1., -4., -1., -10., -3., -7., -3.,
4., -7., -6., -1., 9., -3., 2.],
[ 8., 7., 6., -5., -3., 0., 1., -2., 0., -3., 9.,
-8., 5., 1., 1., 1., -5., 4., -4., 0., -4., -3.,
7., -10., 3., 6., 4., 5., 2., -7., 0., -3., -5.,
2., -6., 4., 5., 8., -1., -3.],
[ 8., -9., -4., 8., -2., 9., 5., 5., -3., -4., 0.,
-5., 5., -2., -10., -4., -3., 5., 8., 6., -2., -2.,
-1., -8., -5., -9., 1., -1., 5., 6., 4., 9., -5.,
6., -2., 7., -7., -9., 4., 2.],
[ 2., 4., 6., 2., 6., -6., -2., 5., 8., 1., 3.,
8., 6., 9., -3., -1., 4., 7., -5., 7., 0., -10.,
9., -6., -4., -7., 1., -2., -2., 3., -1., 2., 5.,
8., 4., -9., 1., -4., 9., 6.],
[ -8., -5., 9., 3., 9., -10., -8., 3., -8., 0., -4.,
-8., -3., -4., -3., 0., 8., 3., -10., 7., 7., -3.,
8., 4., -3., 9., 3., 7., 2., 7., -8., -3., -4.,
-7., 3., -9., -10., 2., 5., 7.],
[ 5., -7., -8., 6., -8., 1., -8., 4., 2., 6., -6.,
-5., 4., -1., 3., -8., -3., 6., 5., -5., 1., -7.,
8., -10., 8., 1., 3., 7., 2., 2., -1., 1., -3.,
7., 1., 6., -6., 0., -9., 6.]], dtype=float32)>, 'per_arm': <tf.Tensor: shape=(20, 70, 50), dtype=float32, numpy=
array([[[ 5., -6., 4., ..., -3., 3., 4.],
[-5., -6., -4., ..., 3., 4., -4.],
[ 1., -1., 5., ..., -1., -3., 1.],
...,
[ 3., 3., -5., ..., 4., 4., 0.],
[ 5., 1., -3., ..., -2., -2., -3.],
[-6., 4., 2., ..., 4., 5., -5.]],
[[-5., -3., 1., ..., -2., -1., 1.],
[ 1., 4., -1., ..., -1., -4., -4.],
[ 4., -6., 5., ..., 2., -2., 4.],
...,
[ 0., 4., -4., ..., -1., -3., 1.],
[ 3., 4., 5., ..., -5., -2., -2.],
[ 0., 4., -3., ..., 5., 1., 3.]],
[[-2., -6., -6., ..., -6., 1., -5.],
[ 4., 5., 5., ..., 1., 4., -4.],
[ 0., 0., -3., ..., -5., 0., -2.],
...,
[-3., -1., 4., ..., 5., -2., 5.],
[-3., -6., -2., ..., 3., 1., -5.],
[ 5., -3., -5., ..., -4., 4., -5.]],
...,
[[ 4., 3., 0., ..., 1., -6., 4.],
[-5., -3., 5., ..., 0., -1., -5.],
[ 0., 4., 3., ..., -2., 1., -3.],
...,
[-5., -2., -5., ..., -5., -5., -2.],
[-2., 5., 4., ..., -2., -2., 2.],
[-1., -4., 4., ..., -5., 2., -3.]],
[[-1., -4., 4., ..., -3., -5., 4.],
[-4., -6., -2., ..., -1., -6., 0.],
[ 0., 0., 5., ..., 4., -4., 0.],
...,
[ 2., 3., 5., ..., -6., -5., 5.],
[-5., -5., 2., ..., 0., 4., -2.],
[ 4., -5., -4., ..., -5., -5., -1.]],
[[ 3., 0., 2., ..., 2., 1., -3.],
[-5., -4., 3., ..., -6., 0., -2.],
[-4., -5., 3., ..., -6., -3., 0.],
...,
[-6., -6., 4., ..., -1., -5., -2.],
[-4., 3., -1., ..., 1., 4., 4.],
[ 5., 2., 2., ..., -3., 1., -4.]]], dtype=float32)>}
Rewards after taking an action: tf.Tensor(
[-130.17787 344.98013 371.39893 75.433975 396.35742
-176.46881 56.62174 -158.03278 491.3239 -156.10696
-1.0527252 -264.42285 22.356699 -395.89832 125.951546
142.99467 -322.3012 -24.547596 -159.47539 -44.123775 ], shape=(20,), dtype=float32)
Gözlem özelliğinin iki öğeli bir sözlük olduğunu görüyoruz:
- Anahtarla biri
'global': Bu şekil parametresi eşleşen küresel bağlam parçasıdırGLOBAL_DIM. - Anahtar ile bir
'per_arm'Bu başına kol bağlam ve şekli olan[NUM_ACTIONS, PER_ARM_DIM]. Bu kısım, bir zaman adımındaki her kol için kol özellikleri için yer tutucudur.
LinUCB Temsilcisi
LinUCB aracısı, lineer ödül fonksiyonunun parametresini tahmin ederken aynı zamanda tahmin etrafında bir güven elipsoidini koruyan aynı adlı Bandit algoritmasını uygular. Aracı, parametrenin güven elipsoidi içinde olduğunu varsayarak, beklenen en yüksek tahmini ödüle sahip kolu seçer.
Bir etmen yaratmak, gözlem bilgisini ve eylem belirtimini gerektirir. Ajanı tanımlarken, biz boolean parametre set accepts_per_arm_features ayarlı True .
observation_spec = per_arm_tf_env.observation_spec()
time_step_spec = ts.time_step_spec(observation_spec)
action_spec = tensor_spec.BoundedTensorSpec(
dtype=tf.int32, shape=(), minimum=0, maximum=NUM_ACTIONS - 1)
agent = lin_ucb_agent.LinearUCBAgent(time_step_spec=time_step_spec,
action_spec=action_spec,
accepts_per_arm_features=True)
Eğitim Verilerinin Akışı
Bu bölüm, kol başına özelliklerin politikadan eğitime nasıl geçtiğinin mekaniğine gizli bir bakış sağlar. Bir sonraki bölüme (Pişmanlık Metriğinin Tanımlanması) atlamaktan çekinmeyin ve ilgilenirseniz daha sonra buraya geri dönün.
İlk olarak, aracıdaki veri özelliklerine bir göz atalım. training_data_spec eğitim verileri olmalıdır yapısı unsurlar ve ajan belirttiği öznitelik.
print('training data spec: ', agent.training_data_spec)
training data spec: Trajectory(
{'action': BoundedTensorSpec(shape=(), dtype=tf.int32, name=None, minimum=array(0, dtype=int32), maximum=array(69, dtype=int32)),
'discount': BoundedTensorSpec(shape=(), dtype=tf.float32, name='discount', minimum=array(0., dtype=float32), maximum=array(1., dtype=float32)),
'next_step_type': TensorSpec(shape=(), dtype=tf.int32, name='step_type'),
'observation': {'global': TensorSpec(shape=(40,), dtype=tf.float32, name=None)},
'policy_info': PerArmPolicyInfo(log_probability=(), predicted_rewards_mean=(), multiobjective_scalarized_predicted_rewards_mean=(), predicted_rewards_optimistic=(), predicted_rewards_sampled=(), bandit_policy_type=(), chosen_arm_features=TensorSpec(shape=(50,), dtype=tf.float32, name=None)),
'reward': TensorSpec(shape=(), dtype=tf.float32, name='reward'),
'step_type': TensorSpec(shape=(), dtype=tf.int32, name='step_type')})
Biz daha yakından bakmak varsa observation spec parçası, bunun başına kol özelliklerini içermiyor görüyoruz!
print('observation spec in training: ', agent.training_data_spec.observation)
observation spec in training: {'global': TensorSpec(shape=(40,), dtype=tf.float32, name=None)}
Kol başına özelliklere ne oldu? Bu soruyu cevaplamak için, öncelikle LinUCB ajan trenler, tüm silah başına kol özelliklerine ihtiyaç duyan vermediğinde, yalnızca seçilen kolun bu ihtiyacı olduğunu unutmayın. Bu nedenle, bu şeklin tensör düşmesi mantıklı [BATCH_SIZE, NUM_ACTIONS, PER_ARM_DIM] o eylemlerin sayısını büyük, özellikle, oldukça atığa neden olan şekilde.
Ama yine de, seçilen kolun kol başına özellikleri bir yerde olmalı! Bu amaçla, emin olmak LinUCB politikası mağazalarında olduğu içinde seçmiş kolun özellikleri policy_info eğitim verileri alanında:
print('chosen arm features: ', agent.training_data_spec.policy_info.chosen_arm_features)
chosen arm features: TensorSpec(shape=(50,), dtype=tf.float32, name=None)
Biz bu şekle görmek chosen_arm_features alan bir kolun sadece özellik vektörü vardır ve bu seçilen kol olacaktır. O Not policy_info ve onunla chosen_arm_features biz eğitim verileri spec teftiş gördüğümüz gibi, eğitim verilerinin parçasıdır ve bu nedenle eğitim süresi mevcuttur.
Pişmanlık Metriğinin Tanımlanması
Eğitim döngüsüne başlamadan önce, temsilcimizin pişmanlığını hesaplamaya yardımcı olan bazı yardımcı fonksiyonlar tanımlarız. Bu işlevler, (kol özellikleri tarafından verilen) bir dizi eylem ve aracıdan gizlenen doğrusal parametre verilen optimal beklenen ödülün belirlenmesine yardımcı olur.
def _all_rewards(observation, hidden_param):
"""Outputs rewards for all actions, given an observation."""
hidden_param = tf.cast(hidden_param, dtype=tf.float32)
global_obs = observation['global']
per_arm_obs = observation['per_arm']
num_actions = tf.shape(per_arm_obs)[1]
tiled_global = tf.tile(
tf.expand_dims(global_obs, axis=1), [1, num_actions, 1])
concatenated = tf.concat([tiled_global, per_arm_obs], axis=-1)
rewards = tf.linalg.matvec(concatenated, hidden_param)
return rewards
def optimal_reward(observation):
"""Outputs the maximum expected reward for every element in the batch."""
return tf.reduce_max(_all_rewards(observation, reward_param), axis=1)
regret_metric = tf_bandit_metrics.RegretMetric(optimal_reward)
Şimdi haydut eğitim döngümüze başlamak için hazırız. Aşağıdaki sürücü, politikayı kullanarak eylemleri seçme, seçilen eylemlerin ödüllerini tekrar arabelleğinde saklama, önceden tanımlanmış pişmanlık metriğini hesaplama ve aracının eğitim adımını yürütme ile ilgilenir.
num_iterations = 20 # @param
steps_per_loop = 1 # @param
replay_buffer = tf_uniform_replay_buffer.TFUniformReplayBuffer(
data_spec=agent.policy.trajectory_spec,
batch_size=BATCH_SIZE,
max_length=steps_per_loop)
observers = [replay_buffer.add_batch, regret_metric]
driver = dynamic_step_driver.DynamicStepDriver(
env=per_arm_tf_env,
policy=agent.collect_policy,
num_steps=steps_per_loop * BATCH_SIZE,
observers=observers)
regret_values = []
for _ in range(num_iterations):
driver.run()
loss_info = agent.train(replay_buffer.gather_all())
replay_buffer.clear()
regret_values.append(regret_metric.result())
WARNING:tensorflow:From /tmp/ipykernel_12052/1190294793.py:21: ReplayBuffer.gather_all (from tf_agents.replay_buffers.replay_buffer) is deprecated and will be removed in a future version. Instructions for updating: Use `as_dataset(..., single_deterministic_pass=True)` instead.
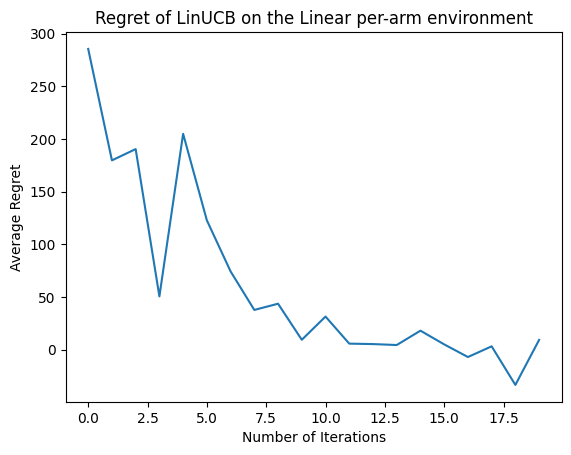
Şimdi sonucu görelim. Her şeyi doğru yaptıysak, aracı, doğrusal ödül işlevini iyi tahmin edebilir ve böylece politika, beklenen ödülü optimalinkine yakın olan eylemleri seçebilir. Bu, aşağı inen ve sıfıra yaklaşan, yukarıda tanımlanan pişmanlık metriğimiz tarafından gösterilir.
plt.plot(regret_values)
plt.title('Regret of LinUCB on the Linear per-arm environment')
plt.xlabel('Number of Iterations')
_ = plt.ylabel('Average Regret')
Sıradaki ne?
Yukarıdaki örnek olduğu hayata da dahil olmak üzere, hem de diğer ajanlar seçebileceğiniz bizim kod temeli Sinir epsilon-Açgözlü ajan .