
זכויות יוצרים 2021 מחברי TF-Agents.
| | |  צפה במקור ב-GitHub צפה במקור ב-GitHub | |
מבוא
מופעי דוגמה זו איך לאמן מגיב שחקן רך סוכן על Minitaur הסביבה.
אם עבדת דרך Colab DQN הזה צריך להרגיש מאוד מוכר. שינויים בולטים כוללים:
- שינוי הסוכן מ-DQN ל-SAC.
- אימון על Minitaur שהיא סביבה הרבה יותר מורכבת מ- CartPole. סביבת המיניטור שואפת לאמן רובוט מרובע להתקדם.
- שימוש ב-TF-Agents Actor-Learner API עבור למידת חיזוק מבוזרת.
ה-API תומך הן באיסוף נתונים מבוזר באמצעות מאגר הפעלה חוזר של חוויה ומיכל משתנה (שרת פרמטרים) והן באימון מבוזר על פני מספר מכשירים. ה-API תוכנן להיות מאוד פשוט ומודולרי. אנו מנצלים Reverb הוא חיץ חוזר ו מיכל משתנה ו TF DistributionStrategy API לאימונים מופצים על GPUs ו TPUs.
אם לא התקנת את התלויות הבאות, הרץ:
sudo apt-get updatesudo apt-get install -y xvfb ffmpegpip install 'imageio==2.4.0'pip install matplotlibpip install tf-agents[reverb]pip install pybullet
להכין
ראשית, נייבא את הכלים השונים שאנו צריכים.
import base64
import imageio
import IPython
import matplotlib.pyplot as plt
import os
import reverb
import tempfile
import PIL.Image
import tensorflow as tf
from tf_agents.agents.ddpg import critic_network
from tf_agents.agents.sac import sac_agent
from tf_agents.agents.sac import tanh_normal_projection_network
from tf_agents.environments import suite_pybullet
from tf_agents.metrics import py_metrics
from tf_agents.networks import actor_distribution_network
from tf_agents.policies import greedy_policy
from tf_agents.policies import py_tf_eager_policy
from tf_agents.policies import random_py_policy
from tf_agents.replay_buffers import reverb_replay_buffer
from tf_agents.replay_buffers import reverb_utils
from tf_agents.train import actor
from tf_agents.train import learner
from tf_agents.train import triggers
from tf_agents.train.utils import spec_utils
from tf_agents.train.utils import strategy_utils
from tf_agents.train.utils import train_utils
tempdir = tempfile.gettempdir()
היפרפרמטרים
env_name = "MinitaurBulletEnv-v0" # @param {type:"string"}
# Use "num_iterations = 1e6" for better results (2 hrs)
# 1e5 is just so this doesn't take too long (1 hr)
num_iterations = 100000 # @param {type:"integer"}
initial_collect_steps = 10000 # @param {type:"integer"}
collect_steps_per_iteration = 1 # @param {type:"integer"}
replay_buffer_capacity = 10000 # @param {type:"integer"}
batch_size = 256 # @param {type:"integer"}
critic_learning_rate = 3e-4 # @param {type:"number"}
actor_learning_rate = 3e-4 # @param {type:"number"}
alpha_learning_rate = 3e-4 # @param {type:"number"}
target_update_tau = 0.005 # @param {type:"number"}
target_update_period = 1 # @param {type:"number"}
gamma = 0.99 # @param {type:"number"}
reward_scale_factor = 1.0 # @param {type:"number"}
actor_fc_layer_params = (256, 256)
critic_joint_fc_layer_params = (256, 256)
log_interval = 5000 # @param {type:"integer"}
num_eval_episodes = 20 # @param {type:"integer"}
eval_interval = 10000 # @param {type:"integer"}
policy_save_interval = 5000 # @param {type:"integer"}
סביבה
סביבות ב-RL מייצגות את המשימה או הבעיה שאנו מנסים לפתור. ניתן סביבות תקן נוצרו בקלות-סוכני TF באמצעות suites . יש לנו שונות suites לטעינת סביבות ממקורות כגון כושר OpenAI, אטארי, בקרת DM, וכו ', נתן שם בסביבת מחרוזת.
עכשיו בואו נטען את סביבת Minituar מחבילת Pybullet.
env = suite_pybullet.load(env_name)
env.reset()
PIL.Image.fromarray(env.render())
pybullet build time: Oct 11 2021 20:59:00
/tmpfs/src/tf_docs_env/lib/python3.7/site-packages/gym/spaces/box.py:74: UserWarning: WARN: Box bound precision lowered by casting to float32
"Box bound precision lowered by casting to {}".format(self.dtype)
current_dir=/tmpfs/src/tf_docs_env/lib/python3.7/site-packages/pybullet_envs/bullet
urdf_root=/tmpfs/src/tf_docs_env/lib/python3.7/site-packages/pybullet_data
בסביבה זו המטרה היא שהסוכן יאמן מדיניות שתשלוט ברובוט המיניטור ותגרום לו להתקדם כמה שיותר מהר. פרקים נמשכים 1000 צעדים והחזרה תהיה סכום התגמולים לאורך כל הפרק.
המבט באים בבית המידע הסביבה מספק כקובץ observation שבה המדיניות תשתמש כדי ליצור actions .
print('Observation Spec:')
print(env.time_step_spec().observation)
print('Action Spec:')
print(env.action_spec())
Observation Spec:
BoundedArraySpec(shape=(28,), dtype=dtype('float32'), name='observation', minimum=[ -3.1515927 -3.1515927 -3.1515927 -3.1515927 -3.1515927
-3.1515927 -3.1515927 -3.1515927 -167.72488 -167.72488
-167.72488 -167.72488 -167.72488 -167.72488 -167.72488
-167.72488 -5.71 -5.71 -5.71 -5.71
-5.71 -5.71 -5.71 -5.71 -1.01
-1.01 -1.01 -1.01 ], maximum=[ 3.1515927 3.1515927 3.1515927 3.1515927 3.1515927 3.1515927
3.1515927 3.1515927 167.72488 167.72488 167.72488 167.72488
167.72488 167.72488 167.72488 167.72488 5.71 5.71
5.71 5.71 5.71 5.71 5.71 5.71
1.01 1.01 1.01 1.01 ])
Action Spec:
BoundedArraySpec(shape=(8,), dtype=dtype('float32'), name='action', minimum=-1.0, maximum=1.0)
התצפית מורכבת למדי. אנו מקבלים 28 ערכים המייצגים את הזוויות, המהירויות והמומנטים של כל המנועים. בתמורה הסביבה מצפה 8 ערכים עבור פעולות בין [-1, 1] . אלו הן הזוויות המוטוריות הרצויות.
בדרך כלל אנו יוצרים שתי סביבות: אחת לאיסוף נתונים במהלך האימון ואחת להערכה. הסביבות כתובות בפיתון טהור ומשתמשות במערכים numpy, שה-Actor Learner API צורך ישירות.
collect_env = suite_pybullet.load(env_name)
eval_env = suite_pybullet.load(env_name)
urdf_root=/tmpfs/src/tf_docs_env/lib/python3.7/site-packages/pybullet_data urdf_root=/tmpfs/src/tf_docs_env/lib/python3.7/site-packages/pybullet_data
אסטרטגיית הפצה
אנו משתמשים ב-DistributionStrategy API כדי לאפשר הפעלת חישוב צעדי הרכבת על פני התקנים מרובים כגון מספר GPUs או TPUs באמצעות מקביליות נתונים. צעד הרכבת:
- מקבל אצווה של נתוני אימון
- מפצל אותו בין המכשירים
- מחשב את הצעד קדימה
- אוסף ומחשב את ה-MEAN של ההפסד
- מחשב את הצעד אחורה ומבצע עדכון משתנה גרדיאנט
עם TF-Agents Learner API ו-DistributionStrategy API די קל לעבור בין הפעלת שלב הרכבת על GPUs (באמצעות MirroredStrategy) ל-TPUs (באמצעות TPUStrategy) מבלי לשנות אף אחד מהלוגיקה האימון למטה.
הפעלת ה-GPU
אם אתה רוצה לנסות לרוץ על GPU, תחילה עליך להפעיל GPUs עבור המחברת:
- נווט אל עריכה → הגדרות מחברת
- בחר GPU מהתפריט הנפתח מאיץ החומרה
בחירת אסטרטגיה
השתמש strategy_utils ליצור אסטרטגיה. מתחת למכסה המנוע, העברת הפרמטר:
-
use_gpu = Falseמחזירהtf.distribute.get_strategy(), אשר משתמשת ב- CPU -
use_gpu = Trueמחזירהtf.distribute.MirroredStrategy(), אשר משתמשת כל GPUs כי הם גלויים TensorFlow על מכונה אחת
use_gpu = True
strategy = strategy_utils.get_strategy(tpu=False, use_gpu=use_gpu)
INFO:tensorflow:Using MirroredStrategy with devices ('/job:localhost/replica:0/task:0/device:GPU:0',)
INFO:tensorflow:Using MirroredStrategy with devices ('/job:localhost/replica:0/task:0/device:GPU:0',)
כל המשתנים סוכנים צריכים להיווצר תחת strategy.scope() , כפי שתראו בהמשך.
סוֹכֵן
כדי ליצור סוכן SAC, ראשית עלינו ליצור את הרשתות שהוא יאמן. SAC הוא סוכן מבקר שחקנים, אז נצטרך שתי רשתות.
המבקר ייתן לנו הערכות שווי עבור Q(s,a) . כלומר, הוא יקבל כקלט התבוננות ופעולה, והוא ייתן לנו הערכה עד כמה הפעולה הייתה טובה למצב הנתון.
observation_spec, action_spec, time_step_spec = (
spec_utils.get_tensor_specs(collect_env))
with strategy.scope():
critic_net = critic_network.CriticNetwork(
(observation_spec, action_spec),
observation_fc_layer_params=None,
action_fc_layer_params=None,
joint_fc_layer_params=critic_joint_fc_layer_params,
kernel_initializer='glorot_uniform',
last_kernel_initializer='glorot_uniform')
נשתמש מבקר זה להכשיר actor רשת אשר תאפשר לנו לייצר פעולות שניתן תצפית.
ActorNetwork יהיה לחזות פרמטרים עבור פחית מעוכה-TANH MultivariateNormalDiag ההפצה. לאחר מכן תידגם התפלגות זו, מותנית בתצפית הנוכחית, בכל פעם שנצטרך ליצור פעולות.
with strategy.scope():
actor_net = actor_distribution_network.ActorDistributionNetwork(
observation_spec,
action_spec,
fc_layer_params=actor_fc_layer_params,
continuous_projection_net=(
tanh_normal_projection_network.TanhNormalProjectionNetwork))
עם רשתות אלה בהישג יד, אנו יכולים כעת ליצור מופע של הסוכן.
with strategy.scope():
train_step = train_utils.create_train_step()
tf_agent = sac_agent.SacAgent(
time_step_spec,
action_spec,
actor_network=actor_net,
critic_network=critic_net,
actor_optimizer=tf.keras.optimizers.Adam(
learning_rate=actor_learning_rate),
critic_optimizer=tf.keras.optimizers.Adam(
learning_rate=critic_learning_rate),
alpha_optimizer=tf.keras.optimizers.Adam(
learning_rate=alpha_learning_rate),
target_update_tau=target_update_tau,
target_update_period=target_update_period,
td_errors_loss_fn=tf.math.squared_difference,
gamma=gamma,
reward_scale_factor=reward_scale_factor,
train_step_counter=train_step)
tf_agent.initialize()
Replay Buffer
על מנת לעקוב אחר הנתונים שנאספו מהסביבה, נשתמש Reverb , מערכת שידור חוזר יעיל, להרחבה, וקל לשימוש על ידי Deepmind. הוא מאחסן נתוני ניסיון שנאספו על ידי השחקנים ונצרכו על ידי הלומד במהלך האימון.
במדריך זה, זה חשוב פחות max_size - אבל בסביבה מבוזרת עם אוסף async והכשרה, סביר להניח שתרצה להתנסות rate_limiters.SampleToInsertRatio , באמצעות איפשהו samples_per_insert בין 2 ו -1000 לדוגמה:
rate_limiter=reverb.rate_limiters.SampleToInsertRatio(samples_per_insert=3.0, min_size_to_sample=3, error_buffer=3.0)
table_name = 'uniform_table'
table = reverb.Table(
table_name,
max_size=replay_buffer_capacity,
sampler=reverb.selectors.Uniform(),
remover=reverb.selectors.Fifo(),
rate_limiter=reverb.rate_limiters.MinSize(1))
reverb_server = reverb.Server([table])
[reverb/cc/platform/tfrecord_checkpointer.cc:150] Initializing TFRecordCheckpointer in /tmp/tmpl579aohk. [reverb/cc/platform/tfrecord_checkpointer.cc:386] Loading latest checkpoint from /tmp/tmpl579aohk [reverb/cc/platform/default/server.cc:71] Started replay server on port 15652
המאגר החוזר נבנה באמצעות מפרט המתאר את tensors כי הם יאוחסנו, אשר ניתן לקבל הסוכן באמצעות tf_agent.collect_data_spec .
מאז סוכן SAC זקוק הן נוכחי וההתבוננות הבאה כדי לחשב את האובדן, קבענו sequence_length=2 .
reverb_replay = reverb_replay_buffer.ReverbReplayBuffer(
tf_agent.collect_data_spec,
sequence_length=2,
table_name=table_name,
local_server=reverb_server)
כעת אנו יוצרים מערך נתונים של TensorFlow ממאגר ההשמעה החוזרת של Reverb. אנו נעביר זאת ללומד כדי לדגום חוויות להדרכה.
dataset = reverb_replay.as_dataset(
sample_batch_size=batch_size, num_steps=2).prefetch(50)
experience_dataset_fn = lambda: dataset
מדיניות
In-סוכני TF, מדיניות לייצג את הרעיון הסטנדרטי של מדיניות ב RL: נתון time_step לייצר פעולה או הפצה מעל פעולות. השיטה העיקרית היא policy_step = policy.step(time_step) שבו policy_step הוא tuple בשם PolicyStep(action, state, info) . policy_step.action היא action שיש להחיל על הסביבה, state מייצגת את המדינה עבור מצבים (RNN) מדיניות info עשוי להכיל מידע עזר כגון הסתברויות יומן של הפעולות.
סוכנים מכילים שני מדיניות:
-
agent.policy- המדיניות העיקרית המשמשת להערכה ופריסה. -
agent.collect_policy- מדיניות שנייה המשמשת לאיסוף נתונים.
tf_eval_policy = tf_agent.policy
eval_policy = py_tf_eager_policy.PyTFEagerPolicy(
tf_eval_policy, use_tf_function=True)
tf_collect_policy = tf_agent.collect_policy
collect_policy = py_tf_eager_policy.PyTFEagerPolicy(
tf_collect_policy, use_tf_function=True)
ניתן ליצור מדיניות ללא תלות בסוכנים. לדוגמה, להשתמש tf_agents.policies.random_py_policy ליצור מדיניות אשר יבחר באקראי פעולה עבור כל time_step.
random_policy = random_py_policy.RandomPyPolicy(
collect_env.time_step_spec(), collect_env.action_spec())
שחקנים
השחקן מנהל אינטראקציות בין מדיניות לסביבה.
- רכיבי השחקן לכלול מופע של הסביבה (כמו
py_environment) ועותק של משתני המדיניות. - כל עובד Actor מפעיל רצף של שלבי איסוף נתונים בהינתן הערכים המקומיים של משתני המדיניות.
- עדכונים משתנים נעשים במפורש באמצעות מופע לקוח מיכל משתנה בתסריט האימונים לפני פניית
actor.run(). - החוויה הנצפית נכתבת במאגר ההפעלה החוזר בכל שלב של איסוף נתונים.
כשהשחקנים מריצים שלבי איסוף נתונים, הם מעבירים מסלולים של (מצב, פעולה, תגמול) לצופה, אשר מאחסן וכותב אותם למערכת ההשמעה החוזרת של Reverb.
אנחנו לאחסון מסלולים עבור מסגרות [(t0, T1) (T1, T2) (T2, T3), ...] בגלל stride_length=1 .
rb_observer = reverb_utils.ReverbAddTrajectoryObserver(
reverb_replay.py_client,
table_name,
sequence_length=2,
stride_length=1)
אנו יוצרים שחקן עם המדיניות האקראית ואוספים חוויות כדי להנחיל את חיץ השידור החוזר.
initial_collect_actor = actor.Actor(
collect_env,
random_policy,
train_step,
steps_per_run=initial_collect_steps,
observers=[rb_observer])
initial_collect_actor.run()
הצג שחקן עם מדיניות האיסוף כדי לאסוף חוויות נוספות במהלך האימון.
env_step_metric = py_metrics.EnvironmentSteps()
collect_actor = actor.Actor(
collect_env,
collect_policy,
train_step,
steps_per_run=1,
metrics=actor.collect_metrics(10),
summary_dir=os.path.join(tempdir, learner.TRAIN_DIR),
observers=[rb_observer, env_step_metric])
צור שחקן שישמש להערכת המדיניות במהלך ההדרכה. אנחנו עוברים actor.eval_metrics(num_eval_episodes) להיכנס מדדים מאוחר.
eval_actor = actor.Actor(
eval_env,
eval_policy,
train_step,
episodes_per_run=num_eval_episodes,
metrics=actor.eval_metrics(num_eval_episodes),
summary_dir=os.path.join(tempdir, 'eval'),
)
לומדים
הרכיב Learner מכיל את הסוכן ומבצע עדכוני צעדי גרדיאנט למשתני המדיניות באמצעות נתוני ניסיון ממאגר ההשמעה החוזרת. לאחר שלב אימון אחד או יותר, הלומד יכול לדחוף קבוצה חדשה של ערכי משתנים למיכל המשתנה.
saved_model_dir = os.path.join(tempdir, learner.POLICY_SAVED_MODEL_DIR)
# Triggers to save the agent's policy checkpoints.
learning_triggers = [
triggers.PolicySavedModelTrigger(
saved_model_dir,
tf_agent,
train_step,
interval=policy_save_interval),
triggers.StepPerSecondLogTrigger(train_step, interval=1000),
]
agent_learner = learner.Learner(
tempdir,
train_step,
tf_agent,
experience_dataset_fn,
triggers=learning_triggers,
strategy=strategy)
WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow_probability/python/distributions/distribution.py:342: calling MultivariateNormalDiag.__init__ (from tensorflow_probability.python.distributions.mvn_diag) with scale_identity_multiplier is deprecated and will be removed after 2020-01-01. Instructions for updating: `scale_identity_multiplier` is deprecated; please combine it into `scale_diag` directly instead. WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow_probability/python/distributions/distribution.py:342: calling MultivariateNormalDiag.__init__ (from tensorflow_probability.python.distributions.mvn_diag) with scale_identity_multiplier is deprecated and will be removed after 2020-01-01. Instructions for updating: `scale_identity_multiplier` is deprecated; please combine it into `scale_diag` directly instead. WARNING:absl:WARNING: Could not serialize policy.distribution() for policy "<tf_agents.policies.actor_policy.ActorPolicy object at 0x7fe64b86ce90>". Calling saved_model.distribution() will raise the following assertion error: missing a required argument: 'distribution' 2021-12-01 12:19:19.139118: W tensorflow/python/util/util.cc:368] Sets are not currently considered sequences, but this may change in the future, so consider avoiding using them. WARNING:absl:WARNING: Could not serialize policy.distribution() for policy "<tf_agents.policies.actor_policy.ActorPolicy object at 0x7fe64b86ce90>". Calling saved_model.distribution() will raise the following assertion error: missing a required argument: 'distribution' WARNING:absl:Function `function_with_signature` contains input name(s) 0/step_type, 0/reward, 0/discount, 0/observation with unsupported characters which will be renamed to step_type, reward, discount, observation in the SavedModel. WARNING:absl:WARNING: Could not serialize policy.distribution() for policy "<tf_agents.policies.actor_policy.ActorPolicy object at 0x7fe64b86ce90>". Calling saved_model.distribution() will raise the following assertion error: missing a required argument: 'distribution' WARNING:absl:Found untraced functions such as ActorDistributionNetwork_layer_call_fn, ActorDistributionNetwork_layer_call_and_return_conditional_losses, EncodingNetwork_layer_call_fn, EncodingNetwork_layer_call_and_return_conditional_losses, TanhNormalProjectionNetwork_layer_call_fn while saving (showing 5 of 35). These functions will not be directly callable after loading. INFO:tensorflow:Assets written to: /tmp/policies/policy/assets INFO:tensorflow:Assets written to: /tmp/policies/policy/assets WARNING:absl:Function `function_with_signature` contains input name(s) 0/step_type, 0/reward, 0/discount, 0/observation with unsupported characters which will be renamed to step_type, reward, discount, observation in the SavedModel. WARNING:absl:WARNING: Could not serialize policy.distribution() for policy "<tf_agents.policies.actor_policy.ActorPolicy object at 0x7fe64b86ce90>". Calling saved_model.distribution() will raise the following assertion error: missing a required argument: 'distribution' WARNING:absl:Found untraced functions such as ActorDistributionNetwork_layer_call_fn, ActorDistributionNetwork_layer_call_and_return_conditional_losses, EncodingNetwork_layer_call_fn, EncodingNetwork_layer_call_and_return_conditional_losses, TanhNormalProjectionNetwork_layer_call_fn while saving (showing 5 of 35). These functions will not be directly callable after loading. INFO:tensorflow:Assets written to: /tmp/policies/collect_policy/assets INFO:tensorflow:Assets written to: /tmp/policies/collect_policy/assets WARNING:absl:Function `function_with_signature` contains input name(s) 0/step_type, 0/reward, 0/discount, 0/observation with unsupported characters which will be renamed to step_type, reward, discount, observation in the SavedModel. WARNING:absl:Found untraced functions such as ActorDistributionNetwork_layer_call_fn, ActorDistributionNetwork_layer_call_and_return_conditional_losses, EncodingNetwork_layer_call_fn, EncodingNetwork_layer_call_and_return_conditional_losses, TanhNormalProjectionNetwork_layer_call_fn while saving (showing 5 of 35). These functions will not be directly callable after loading. INFO:tensorflow:Assets written to: /tmp/policies/greedy_policy/assets /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow/python/saved_model/nested_structure_coder.py:561: UserWarning: Encoding a StructuredValue with type tf_agents.policies.greedy_policy.DeterministicWithLogProb_ACTTypeSpec; loading this StructuredValue will require that this type be imported and registered. "imported and registered." % type_spec_class_name) INFO:tensorflow:Assets written to: /tmp/policies/greedy_policy/assets WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tf_agents/train/learner.py:151: StrategyBase.experimental_distribute_datasets_from_function (from tensorflow.python.distribute.distribute_lib) is deprecated and will be removed in a future version. Instructions for updating: rename to distribute_datasets_from_function WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tf_agents/train/learner.py:151: StrategyBase.experimental_distribute_datasets_from_function (from tensorflow.python.distribute.distribute_lib) is deprecated and will be removed in a future version. Instructions for updating: rename to distribute_datasets_from_function
מדדים והערכה
אנחנו מופעי שחקן eval עם actor.eval_metrics לעיל, אשר יוצר מדדים הנפוצים ביותר במהלך הערכת מדיניות:
- תשואה ממוצעת. ההחזר הוא סכום התגמולים שהושגו בעת הפעלת פוליסה בסביבה עבור פרק, ובדרך כלל אנו ממוצעים זאת על פני מספר פרקים.
- אורך פרק ממוצע.
אנחנו מפעילים את השחקן כדי ליצור את המדדים האלה.
def get_eval_metrics():
eval_actor.run()
results = {}
for metric in eval_actor.metrics:
results[metric.name] = metric.result()
return results
metrics = get_eval_metrics()
def log_eval_metrics(step, metrics):
eval_results = (', ').join(
'{} = {:.6f}'.format(name, result) for name, result in metrics.items())
print('step = {0}: {1}'.format(step, eval_results))
log_eval_metrics(0, metrics)
step = 0: AverageReturn = -0.963870, AverageEpisodeLength = 204.100006
בדקו את מודול המדדה עבור יישומים סטנדרטיים אחרים של מדדים שונים.
הכשרת הסוכן
לולאת ההדרכה כוללת גם איסוף נתונים מהסביבה וגם ייעול רשתות הסוכן. לאורך הדרך, מדי פעם נעריך את מדיניות הסוכן כדי לראות מה שלומנו.
try:
%%time
except:
pass
# Reset the train step
tf_agent.train_step_counter.assign(0)
# Evaluate the agent's policy once before training.
avg_return = get_eval_metrics()["AverageReturn"]
returns = [avg_return]
for _ in range(num_iterations):
# Training.
collect_actor.run()
loss_info = agent_learner.run(iterations=1)
# Evaluating.
step = agent_learner.train_step_numpy
if eval_interval and step % eval_interval == 0:
metrics = get_eval_metrics()
log_eval_metrics(step, metrics)
returns.append(metrics["AverageReturn"])
if log_interval and step % log_interval == 0:
print('step = {0}: loss = {1}'.format(step, loss_info.loss.numpy()))
rb_observer.close()
reverb_server.stop()
[reverb/cc/client.cc:163] Sampler and server are owned by the same process (14227) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (14227) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (14227) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (14227) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (14227) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (14227) so Table uniform_table is accessed directly without gRPC. step = 5000: loss = -50.77360153198242 step = 10000: AverageReturn = -0.734191, AverageEpisodeLength = 299.399994 step = 10000: loss = -57.17308044433594 step = 15000: loss = -31.02552032470703 step = 20000: AverageReturn = -1.243302, AverageEpisodeLength = 432.200012 step = 20000: loss = -20.673084259033203 step = 25000: loss = -12.919441223144531 step = 30000: AverageReturn = -0.205654, AverageEpisodeLength = 280.049988 step = 30000: loss = -5.420497417449951 step = 35000: loss = -4.320608139038086 step = 40000: AverageReturn = -1.193502, AverageEpisodeLength = 378.000000 step = 40000: loss = -4.375732421875 step = 45000: loss = -3.0430049896240234 step = 50000: AverageReturn = -1.299686, AverageEpisodeLength = 482.549988 step = 50000: loss = -0.8907612562179565 step = 55000: loss = 1.2096503973007202 step = 60000: AverageReturn = -0.949927, AverageEpisodeLength = 365.899994 step = 60000: loss = 1.8157628774642944 step = 65000: loss = -4.9070353507995605 step = 70000: AverageReturn = -0.644635, AverageEpisodeLength = 506.399994 step = 70000: loss = -0.33166465163230896 step = 75000: loss = -0.41273507475852966 step = 80000: AverageReturn = 0.331935, AverageEpisodeLength = 604.299988 step = 80000: loss = 1.5354682207107544 step = 85000: loss = -2.058459997177124 step = 90000: AverageReturn = 0.292840, AverageEpisodeLength = 520.450012 step = 90000: loss = 1.2136361598968506 step = 95000: loss = -1.810737133026123 step = 100000: AverageReturn = 0.835265, AverageEpisodeLength = 515.349976 step = 100000: loss = -2.6997461318969727 [reverb/cc/platform/default/server.cc:84] Shutting down replay server
רְאִיָה
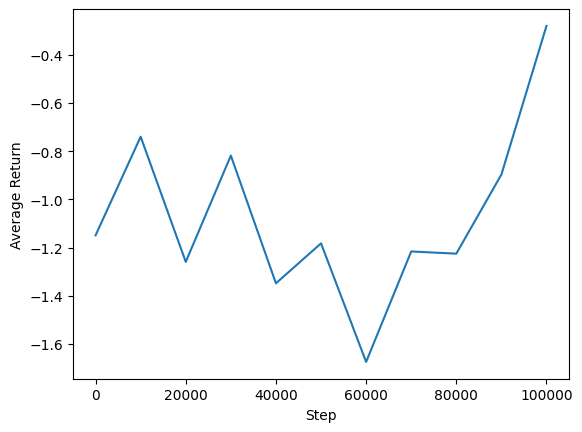
עלילות
אנו יכולים לשרטט תשואה ממוצעת לעומת צעדים גלובליים כדי לראות את הביצועים של הסוכן שלנו. בשנת Minitaur , פונקציית התגמול מבוססת על כמה רחוק minitaur לטיולים 1000 צעדים מעניש ההוצאה האנרגטית.
steps = range(0, num_iterations + 1, eval_interval)
plt.plot(steps, returns)
plt.ylabel('Average Return')
plt.xlabel('Step')
plt.ylim()
(-1.4064332604408265, 0.9420127034187317)
סרטונים
זה מועיל לדמיין את הביצועים של סוכן על ידי עיבוד הסביבה בכל שלב. לפני שנעשה זאת, תחילה ניצור פונקציה להטמעת סרטונים בקולאב הזה.
def embed_mp4(filename):
"""Embeds an mp4 file in the notebook."""
video = open(filename,'rb').read()
b64 = base64.b64encode(video)
tag = '''
<video width="640" height="480" controls>
<source src="data:video/mp4;base64,{0}" type="video/mp4">
Your browser does not support the video tag.
</video>'''.format(b64.decode())
return IPython.display.HTML(tag)
הקוד הבא מדגים את המדיניות של הסוכן לכמה פרקים:
num_episodes = 3
video_filename = 'sac_minitaur.mp4'
with imageio.get_writer(video_filename, fps=60) as video:
for _ in range(num_episodes):
time_step = eval_env.reset()
video.append_data(eval_env.render())
while not time_step.is_last():
action_step = eval_actor.policy.action(time_step)
time_step = eval_env.step(action_step.action)
video.append_data(eval_env.render())
embed_mp4(video_filename)