| | |  Ver en GitHub Ver en GitHub | | |
¡Bienvenido al Colab de detección de objetos de TensorFlow Hub! Este cuaderno lo guiará a través de los pasos para ejecutar un modelo de detección de objetos "listo para usar" en imágenes.
Más modelos
Esta colección contiene TF2 modelos de detección de objetos que han sido entrenados en el conjunto de datos COCO 2017. Aquí puede encontrar todos los modelos de detección de objetos que están actualmente alojados en tfhub.dev .
Importaciones y configuración
Comencemos con las importaciones base.
# This Colab requires TF 2.5.pip install -U "tensorflow>=2.5"
import os
import pathlib
import matplotlib
import matplotlib.pyplot as plt
import io
import scipy.misc
import numpy as np
from six import BytesIO
from PIL import Image, ImageDraw, ImageFont
from six.moves.urllib.request import urlopen
import tensorflow as tf
import tensorflow_hub as hub
tf.get_logger().setLevel('ERROR')
Utilidades
Ejecute la siguiente celda para crear algunas utilidades que se necesitarán más adelante:
- Método auxiliar para cargar una imagen
- Mapa del nombre del modelo al mango TF Hub
- Lista de tuplas con puntos clave humanos para el conjunto de datos COCO 2017. Esto es necesario para modelos con puntos clave.
# @title Run this!!
def load_image_into_numpy_array(path):
"""Load an image from file into a numpy array.
Puts image into numpy array to feed into tensorflow graph.
Note that by convention we put it into a numpy array with shape
(height, width, channels), where channels=3 for RGB.
Args:
path: the file path to the image
Returns:
uint8 numpy array with shape (img_height, img_width, 3)
"""
image = None
if(path.startswith('http')):
response = urlopen(path)
image_data = response.read()
image_data = BytesIO(image_data)
image = Image.open(image_data)
else:
image_data = tf.io.gfile.GFile(path, 'rb').read()
image = Image.open(BytesIO(image_data))
(im_width, im_height) = image.size
return np.array(image.getdata()).reshape(
(1, im_height, im_width, 3)).astype(np.uint8)
ALL_MODELS = {
'CenterNet HourGlass104 512x512' : 'https://tfhub.dev/tensorflow/centernet/hourglass_512x512/1',
'CenterNet HourGlass104 Keypoints 512x512' : 'https://tfhub.dev/tensorflow/centernet/hourglass_512x512_kpts/1',
'CenterNet HourGlass104 1024x1024' : 'https://tfhub.dev/tensorflow/centernet/hourglass_1024x1024/1',
'CenterNet HourGlass104 Keypoints 1024x1024' : 'https://tfhub.dev/tensorflow/centernet/hourglass_1024x1024_kpts/1',
'CenterNet Resnet50 V1 FPN 512x512' : 'https://tfhub.dev/tensorflow/centernet/resnet50v1_fpn_512x512/1',
'CenterNet Resnet50 V1 FPN Keypoints 512x512' : 'https://tfhub.dev/tensorflow/centernet/resnet50v1_fpn_512x512_kpts/1',
'CenterNet Resnet101 V1 FPN 512x512' : 'https://tfhub.dev/tensorflow/centernet/resnet101v1_fpn_512x512/1',
'CenterNet Resnet50 V2 512x512' : 'https://tfhub.dev/tensorflow/centernet/resnet50v2_512x512/1',
'CenterNet Resnet50 V2 Keypoints 512x512' : 'https://tfhub.dev/tensorflow/centernet/resnet50v2_512x512_kpts/1',
'EfficientDet D0 512x512' : 'https://tfhub.dev/tensorflow/efficientdet/d0/1',
'EfficientDet D1 640x640' : 'https://tfhub.dev/tensorflow/efficientdet/d1/1',
'EfficientDet D2 768x768' : 'https://tfhub.dev/tensorflow/efficientdet/d2/1',
'EfficientDet D3 896x896' : 'https://tfhub.dev/tensorflow/efficientdet/d3/1',
'EfficientDet D4 1024x1024' : 'https://tfhub.dev/tensorflow/efficientdet/d4/1',
'EfficientDet D5 1280x1280' : 'https://tfhub.dev/tensorflow/efficientdet/d5/1',
'EfficientDet D6 1280x1280' : 'https://tfhub.dev/tensorflow/efficientdet/d6/1',
'EfficientDet D7 1536x1536' : 'https://tfhub.dev/tensorflow/efficientdet/d7/1',
'SSD MobileNet v2 320x320' : 'https://tfhub.dev/tensorflow/ssd_mobilenet_v2/2',
'SSD MobileNet V1 FPN 640x640' : 'https://tfhub.dev/tensorflow/ssd_mobilenet_v1/fpn_640x640/1',
'SSD MobileNet V2 FPNLite 320x320' : 'https://tfhub.dev/tensorflow/ssd_mobilenet_v2/fpnlite_320x320/1',
'SSD MobileNet V2 FPNLite 640x640' : 'https://tfhub.dev/tensorflow/ssd_mobilenet_v2/fpnlite_640x640/1',
'SSD ResNet50 V1 FPN 640x640 (RetinaNet50)' : 'https://tfhub.dev/tensorflow/retinanet/resnet50_v1_fpn_640x640/1',
'SSD ResNet50 V1 FPN 1024x1024 (RetinaNet50)' : 'https://tfhub.dev/tensorflow/retinanet/resnet50_v1_fpn_1024x1024/1',
'SSD ResNet101 V1 FPN 640x640 (RetinaNet101)' : 'https://tfhub.dev/tensorflow/retinanet/resnet101_v1_fpn_640x640/1',
'SSD ResNet101 V1 FPN 1024x1024 (RetinaNet101)' : 'https://tfhub.dev/tensorflow/retinanet/resnet101_v1_fpn_1024x1024/1',
'SSD ResNet152 V1 FPN 640x640 (RetinaNet152)' : 'https://tfhub.dev/tensorflow/retinanet/resnet152_v1_fpn_640x640/1',
'SSD ResNet152 V1 FPN 1024x1024 (RetinaNet152)' : 'https://tfhub.dev/tensorflow/retinanet/resnet152_v1_fpn_1024x1024/1',
'Faster R-CNN ResNet50 V1 640x640' : 'https://tfhub.dev/tensorflow/faster_rcnn/resnet50_v1_640x640/1',
'Faster R-CNN ResNet50 V1 1024x1024' : 'https://tfhub.dev/tensorflow/faster_rcnn/resnet50_v1_1024x1024/1',
'Faster R-CNN ResNet50 V1 800x1333' : 'https://tfhub.dev/tensorflow/faster_rcnn/resnet50_v1_800x1333/1',
'Faster R-CNN ResNet101 V1 640x640' : 'https://tfhub.dev/tensorflow/faster_rcnn/resnet101_v1_640x640/1',
'Faster R-CNN ResNet101 V1 1024x1024' : 'https://tfhub.dev/tensorflow/faster_rcnn/resnet101_v1_1024x1024/1',
'Faster R-CNN ResNet101 V1 800x1333' : 'https://tfhub.dev/tensorflow/faster_rcnn/resnet101_v1_800x1333/1',
'Faster R-CNN ResNet152 V1 640x640' : 'https://tfhub.dev/tensorflow/faster_rcnn/resnet152_v1_640x640/1',
'Faster R-CNN ResNet152 V1 1024x1024' : 'https://tfhub.dev/tensorflow/faster_rcnn/resnet152_v1_1024x1024/1',
'Faster R-CNN ResNet152 V1 800x1333' : 'https://tfhub.dev/tensorflow/faster_rcnn/resnet152_v1_800x1333/1',
'Faster R-CNN Inception ResNet V2 640x640' : 'https://tfhub.dev/tensorflow/faster_rcnn/inception_resnet_v2_640x640/1',
'Faster R-CNN Inception ResNet V2 1024x1024' : 'https://tfhub.dev/tensorflow/faster_rcnn/inception_resnet_v2_1024x1024/1',
'Mask R-CNN Inception ResNet V2 1024x1024' : 'https://tfhub.dev/tensorflow/mask_rcnn/inception_resnet_v2_1024x1024/1'
}
IMAGES_FOR_TEST = {
'Beach' : 'models/research/object_detection/test_images/image2.jpg',
'Dogs' : 'models/research/object_detection/test_images/image1.jpg',
# By Heiko Gorski, Source: https://commons.wikimedia.org/wiki/File:Naxos_Taverna.jpg
'Naxos Taverna' : 'https://upload.wikimedia.org/wikipedia/commons/6/60/Naxos_Taverna.jpg',
# Source: https://commons.wikimedia.org/wiki/File:The_Coleoptera_of_the_British_islands_(Plate_125)_(8592917784).jpg
'Beatles' : 'https://upload.wikimedia.org/wikipedia/commons/1/1b/The_Coleoptera_of_the_British_islands_%28Plate_125%29_%288592917784%29.jpg',
# By Américo Toledano, Source: https://commons.wikimedia.org/wiki/File:Biblioteca_Maim%C3%B3nides,_Campus_Universitario_de_Rabanales_007.jpg
'Phones' : 'https://upload.wikimedia.org/wikipedia/commons/thumb/0/0d/Biblioteca_Maim%C3%B3nides%2C_Campus_Universitario_de_Rabanales_007.jpg/1024px-Biblioteca_Maim%C3%B3nides%2C_Campus_Universitario_de_Rabanales_007.jpg',
# Source: https://commons.wikimedia.org/wiki/File:The_smaller_British_birds_(8053836633).jpg
'Birds' : 'https://upload.wikimedia.org/wikipedia/commons/0/09/The_smaller_British_birds_%288053836633%29.jpg',
}
COCO17_HUMAN_POSE_KEYPOINTS = [(0, 1),
(0, 2),
(1, 3),
(2, 4),
(0, 5),
(0, 6),
(5, 7),
(7, 9),
(6, 8),
(8, 10),
(5, 6),
(5, 11),
(6, 12),
(11, 12),
(11, 13),
(13, 15),
(12, 14),
(14, 16)]
Herramientas de visualización
Para visualizar las imágenes con los recuadros detectados, los puntos clave y la segmentación adecuados, usaremos la API de detección de objetos de TensorFlow. Para instalarlo clonaremos el repositorio.
# Clone the tensorflow models repositorygit clone --depth 1 https://github.com/tensorflow/models
Cloning into 'models'... remote: Enumerating objects: 3069, done.[K remote: Counting objects: 100% (3069/3069), done.[K remote: Compressing objects: 100% (2600/2600), done.[K remote: Total 3069 (delta 762), reused 1338 (delta 427), pack-reused 0[K Receiving objects: 100% (3069/3069), 33.30 MiB | 18.65 MiB/s, done. Resolving deltas: 100% (762/762), done.
Instalación de la API de detección de objetos
sudo apt install -y protobuf-compilercd models/research/protoc object_detection/protos/*.proto --python_out=.cp object_detection/packages/tf2/setup.py .python -m pip install .
WARNING: apt does not have a stable CLI interface. Use with caution in scripts. dpkg-preconfigure: unable to re-open stdin: No such file or directory
Ahora podemos importar las dependencias que necesitaremos más adelante.
from object_detection.utils import label_map_util
from object_detection.utils import visualization_utils as viz_utils
from object_detection.utils import ops as utils_ops
%matplotlib inline
Cargue los datos del mapa de etiquetas (para graficar).
Los mapas de etiquetas corresponden a los números de índice de nombres de categorías, de modo que cuando nuestra red de convolución predice 5 , sabemos que esto corresponde a airplane . Aquí usamos funciones de utilidad internas, pero cualquier cosa que devuelva un diccionario que mapee enteros a las etiquetas de cadena apropiadas estaría bien.
Vamos, por simplicidad, a cargar desde el repositorio que cargamos el código de la API de Detección de Objetos
PATH_TO_LABELS = './models/research/object_detection/data/mscoco_label_map.pbtxt'
category_index = label_map_util.create_category_index_from_labelmap(PATH_TO_LABELS, use_display_name=True)
Cree un modelo de detección y cargue pesos de modelos entrenados previamente
Aquí elegiremos qué modelo de Detección de Objetos usaremos. Seleccione la arquitectura y se cargará automáticamente. Si desea cambiar el modelo para probar otras arquitecturas más tarde, simplemente cambie la siguiente celda y ejecute las siguientes.
Consejo: si desea leer más detalles sobre el modelo seleccionado, se puede seguir el enlace (mango modelo) y leer documentación adicional sobre TF concentradores. Después de seleccionar un modelo, imprimiremos el asa para que sea más fácil.
Selección de modelo
model_display_name = 'CenterNet HourGlass104 Keypoints 512x512' # @param ['CenterNet HourGlass104 512x512','CenterNet HourGlass104 Keypoints 512x512','CenterNet HourGlass104 1024x1024','CenterNet HourGlass104 Keypoints 1024x1024','CenterNet Resnet50 V1 FPN 512x512','CenterNet Resnet50 V1 FPN Keypoints 512x512','CenterNet Resnet101 V1 FPN 512x512','CenterNet Resnet50 V2 512x512','CenterNet Resnet50 V2 Keypoints 512x512','EfficientDet D0 512x512','EfficientDet D1 640x640','EfficientDet D2 768x768','EfficientDet D3 896x896','EfficientDet D4 1024x1024','EfficientDet D5 1280x1280','EfficientDet D6 1280x1280','EfficientDet D7 1536x1536','SSD MobileNet v2 320x320','SSD MobileNet V1 FPN 640x640','SSD MobileNet V2 FPNLite 320x320','SSD MobileNet V2 FPNLite 640x640','SSD ResNet50 V1 FPN 640x640 (RetinaNet50)','SSD ResNet50 V1 FPN 1024x1024 (RetinaNet50)','SSD ResNet101 V1 FPN 640x640 (RetinaNet101)','SSD ResNet101 V1 FPN 1024x1024 (RetinaNet101)','SSD ResNet152 V1 FPN 640x640 (RetinaNet152)','SSD ResNet152 V1 FPN 1024x1024 (RetinaNet152)','Faster R-CNN ResNet50 V1 640x640','Faster R-CNN ResNet50 V1 1024x1024','Faster R-CNN ResNet50 V1 800x1333','Faster R-CNN ResNet101 V1 640x640','Faster R-CNN ResNet101 V1 1024x1024','Faster R-CNN ResNet101 V1 800x1333','Faster R-CNN ResNet152 V1 640x640','Faster R-CNN ResNet152 V1 1024x1024','Faster R-CNN ResNet152 V1 800x1333','Faster R-CNN Inception ResNet V2 640x640','Faster R-CNN Inception ResNet V2 1024x1024','Mask R-CNN Inception ResNet V2 1024x1024']
model_handle = ALL_MODELS[model_display_name]
print('Selected model:'+ model_display_name)
print('Model Handle at TensorFlow Hub: {}'.format(model_handle))
Selected model:CenterNet HourGlass104 Keypoints 512x512 Model Handle at TensorFlow Hub: https://tfhub.dev/tensorflow/centernet/hourglass_512x512_kpts/1
Cargando el modelo seleccionado de TensorFlow Hub
Aquí solo necesitamos el identificador del modelo que se seleccionó y usamos la biblioteca de Tensorflow Hub para cargarlo en la memoria.
print('loading model...')
hub_model = hub.load(model_handle)
print('model loaded!')
loading model... WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_42408) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_209416) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_220336) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_39751) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_218416) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_encoder_decoder_block_layer_call_and_return_conditional_losses_191780) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_hourglass_network_layer_call_and_return_conditional_losses_95722) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_221896) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_convolutional_block_73_layer_call_and_return_conditional_losses_67031) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_24349) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_211456) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_39306) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_47074) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_44404) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_37736) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_55611) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_216136) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_27222) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_222496) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_54225) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_216016) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_33439) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_22353) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_55134) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_31214) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_52655) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_211936) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_217816) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_45955) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_28112) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_212896) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_205696) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_45078) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_43959) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_49731) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_46845) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_27896) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_28557) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_215656) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_29447) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_21018) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_convolutional_block_73_layer_call_and_return_conditional_losses_204261) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_41747) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_49070) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_222016) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_31443) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_212536) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_206896) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_214816) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_23014) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_convolutional_block_36_layer_call_and_return_conditional_losses_66742) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_38397) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_40857) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_205336) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_51530) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_220096) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_207256) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_input_downsample_block_layer_call_and_return_conditional_losses_56840) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_207616) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_220936) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_23904) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_210496) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_41963) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_222976) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_206416) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_221776) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_223336) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_42637) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_205816) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_212416) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_224296) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_21908) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_212176) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_23230) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_36363) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_35702) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_39967) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_44633) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_27451) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_218296) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_38181) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_56272) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_convolutional_block_71_layer_call_and_return_conditional_losses_77067) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_208696) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_224056) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_50621) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_38645) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_217936) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_216616) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_216496) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_209776) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_213016) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_36611) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_214456) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_215296) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_206776) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_213256) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_46184) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_221056) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_220816) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_39535) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_206176) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_217576) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_210736) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_208816) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_220456) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_32333) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_32104) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_53793) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_207136) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_208216) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_input_downsample_block_layer_call_and_return_conditional_losses_184458) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_222256) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_217096) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_encoder_decoder_block_5_layer_call_and_return_conditional_losses_73080) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_215896) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_27667) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_206056) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_210976) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_210616) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_213496) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_55382) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_34113) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_53100) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_22798) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_21247) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_223936) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_218536) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_29002) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_216856) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_216256) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_207856) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_31659) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_217696) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_21463) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_33223) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_54689) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_convolutional_block_72_layer_call_and_return_conditional_losses_66888) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_208456) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_35454) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_217216) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_208936) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_49960) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_26345) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_215056) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_42192) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_41531) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_216736) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_28786) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_220216) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_49286) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_219136) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_37056) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_22124) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_209656) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_37952) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_21679) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_convolutional_block_36_layer_call_and_return_conditional_losses_203862) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_209056) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_209176) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_25671) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_48625) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_214696) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_214216) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_hourglass_network_layer_call_and_return_conditional_losses_158598) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_223816) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_206296) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_217336) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_215536) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_210256) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_41302) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_30553) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_45739) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_29892) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_221296) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_206536) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_211216) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_209296) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_47290) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_208336) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_38861) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_222136) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_219616) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_51066) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_205936) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_215176) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_32778) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_24794) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_212776) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_205456) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_26116) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_212656) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_27006) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_35238) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_23459) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_214936) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_44188) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_219736) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_35918) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_51746) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_218656) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_34329) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_34793) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_29663) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_37488) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_46400) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_51282) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_210856) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_221656) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_205216) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_30782) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_52191) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_219496) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_56043) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_30998) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_222616) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_215416) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_220576) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_42853) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_25900) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_214576) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_41086) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_29218) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_53348) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_25010) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_216976) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_40196) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_219856) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_211096) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_36147) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_35009) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_54473) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_hourglass_network_layer_call_and_return_conditional_losses_177444) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_217456) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_40641) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_222856) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_48180) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_32549) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_215776) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_219376) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_213136) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_47951) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_39090) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_28341) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_207496) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_33668) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_convolutional_block_72_layer_call_and_return_conditional_losses_204131) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_223456) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_52884) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_encoder_decoder_block_5_layer_call_and_return_conditional_losses_200628) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_223576) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_30337) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_24565) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_210376) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_212296) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_222376) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_center_net_hourglass_feature_extractor_layer_call_and_return_conditional_losses_120906) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_220696) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_224176) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_24120) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_36827) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_214096) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_223216) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_34545) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_211576) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_213376) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_25455) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_222736) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_49515) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_218056) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_213616) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_207016) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_51975) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_221536) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_52439) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_211696) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_encoder_decoder_block_layer_call_and_return_conditional_losses_62755) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_44849) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_residual_block_69_layer_call_and_return_conditional_losses_204469) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_209896) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_208576) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_208096) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_206656) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_45523) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_207976) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_53564) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_26561) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_223696) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_48396) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_48841) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_221176) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_residual_block_69_layer_call_and_return_conditional_losses_67266) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_50176) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_50850) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_218176) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_223096) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_50405) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_37272) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_210016) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_209536) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_219016) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_47519) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_54918) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_219976) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_31888) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_210136) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_54009) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_211816) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_46629) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_23675) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_convolutional_block_71_layer_call_and_return_conditional_losses_203998) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_43527) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_40412) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_205576) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_214336) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_218776) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_22569) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_207376) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_45294) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_221416) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_212056) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_32994) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_213736) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_center_net_hourglass_feature_extractor_layer_call_and_return_conditional_losses_139752) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_213856) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_207736) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_43082) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_216376) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_43743) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_43298) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_25226) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_33884) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_26790) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_211336) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_47735) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_30108) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_219256) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_213976) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_218896) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_55827) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. WARNING:absl:Importing a function (__inference_batchnorm_layer_call_and_return_conditional_losses_56488) with ops with unsaved custom gradients. Will likely fail if a gradient is requested. model loaded!
Cargando una imagen
Probemos el modelo en una imagen simple. Para ayudar con esto, proporcionamos una lista de imágenes de prueba.
Aquí hay algunas cosas simples que puede probar si tiene curiosidad:
- Intente ejecutar inferencia en sus propias imágenes, simplemente cárguelas en colab y cárguelas de la misma manera que se hace en la celda a continuación.
- Modifique algunas de las imágenes de entrada y vea si la detección aún funciona. Algunas cosas simples para probar aquí incluyen voltear la imagen horizontalmente o convertir a escala de grises (tenga en cuenta que aún esperamos que la imagen de entrada tenga 3 canales).
Tenga cuidado: cuando se utilizan imágenes con un canal alfa, el modelo cuente con 3 imágenes canales y el alfa contará como un cuarto.
Selección de imagen (¡no olvide ejecutar la celda!)
selected_image = 'Beach' # @param ['Beach', 'Dogs', 'Naxos Taverna', 'Beatles', 'Phones', 'Birds']
flip_image_horizontally = False
convert_image_to_grayscale = False
image_path = IMAGES_FOR_TEST[selected_image]
image_np = load_image_into_numpy_array(image_path)
# Flip horizontally
if(flip_image_horizontally):
image_np[0] = np.fliplr(image_np[0]).copy()
# Convert image to grayscale
if(convert_image_to_grayscale):
image_np[0] = np.tile(
np.mean(image_np[0], 2, keepdims=True), (1, 1, 3)).astype(np.uint8)
plt.figure(figsize=(24,32))
plt.imshow(image_np[0])
plt.show()

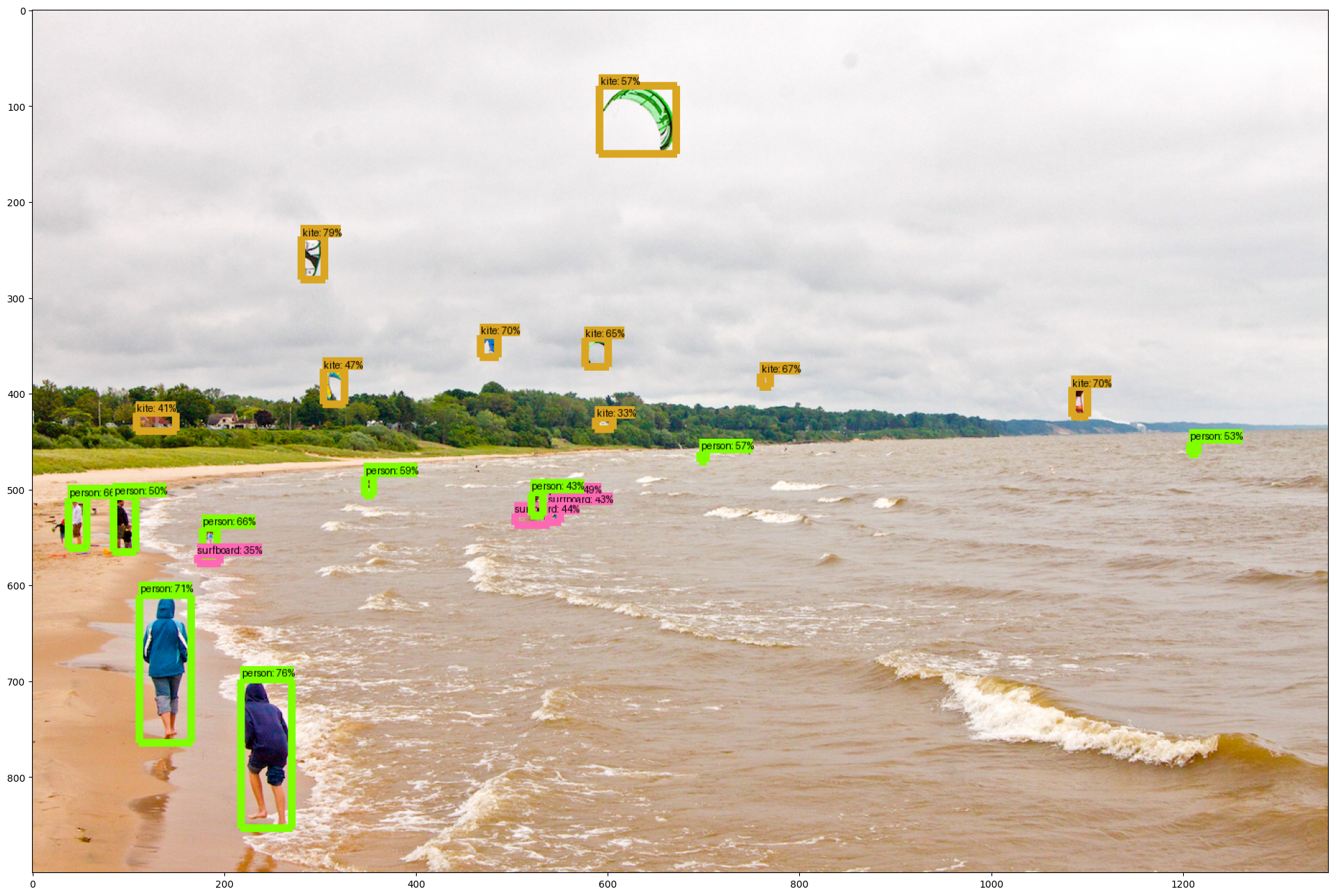
Haciendo la inferencia
Para hacer la inferencia, solo necesitamos llamar a nuestro modelo cargado TF Hub.
Cosas que puedes probar:
- Imprimir
result['detection_boxes']y tratar de igualar los lugares fallado las cajas en la imagen. Observe que las coordenadas se dan en forma normalizada (es decir, en el intervalo [0, 1]). - inspeccione otras claves de salida presentes en el resultado. Se puede ver una documentación completa en la página de documentación de los modelos (apuntando su navegador a la manija del modelo impresa anteriormente)
# running inference
results = hub_model(image_np)
# different object detection models have additional results
# all of them are explained in the documentation
result = {key:value.numpy() for key,value in results.items()}
print(result.keys())
2021-11-05 12:34:59.833050: W tensorflow/core/grappler/optimizers/loop_optimizer.cc:907] Skipping loop optimization for Merge node with control input: StatefulPartitionedCall/cond/then/_918/cond/Assert/AssertGuard/branch_executed/_1114 dict_keys(['detection_classes', 'detection_keypoints', 'detection_keypoint_scores', 'detection_scores', 'detection_boxes', 'num_detections'])
Visualizando los resultados
Aquí es donde necesitaremos la API de detección de objetos de TensorFlow para mostrar los cuadrados del paso de inferencia (y los puntos clave cuando estén disponibles).
La documentación completa de este método se puede ver aquí
Aquí se puede, por ejemplo, conjunto min_score_thresh a otros valores (entre 0 y 1) para permitir que más detecciones en o para filtrar más detecciones.
label_id_offset = 0
image_np_with_detections = image_np.copy()
# Use keypoints if available in detections
keypoints, keypoint_scores = None, None
if 'detection_keypoints' in result:
keypoints = result['detection_keypoints'][0]
keypoint_scores = result['detection_keypoint_scores'][0]
viz_utils.visualize_boxes_and_labels_on_image_array(
image_np_with_detections[0],
result['detection_boxes'][0],
(result['detection_classes'][0] + label_id_offset).astype(int),
result['detection_scores'][0],
category_index,
use_normalized_coordinates=True,
max_boxes_to_draw=200,
min_score_thresh=.30,
agnostic_mode=False,
keypoints=keypoints,
keypoint_scores=keypoint_scores,
keypoint_edges=COCO17_HUMAN_POSE_KEYPOINTS)
plt.figure(figsize=(24,32))
plt.imshow(image_np_with_detections[0])
plt.show()

[Opcional]
Entre los modelos de detección de objetos disponibles está Mask R-CNN y la salida de este modelo permite la segmentación de instancias.
Para visualizarlo vamos a utilizar el mismo método que hicimos antes, pero añadiendo un parámetro adicional: instance_masks=output_dict.get('detection_masks_reframed', None)
# Handle models with masks:
image_np_with_mask = image_np.copy()
if 'detection_masks' in result:
# we need to convert np.arrays to tensors
detection_masks = tf.convert_to_tensor(result['detection_masks'][0])
detection_boxes = tf.convert_to_tensor(result['detection_boxes'][0])
# Reframe the bbox mask to the image size.
detection_masks_reframed = utils_ops.reframe_box_masks_to_image_masks(
detection_masks, detection_boxes,
image_np.shape[1], image_np.shape[2])
detection_masks_reframed = tf.cast(detection_masks_reframed > 0.5,
tf.uint8)
result['detection_masks_reframed'] = detection_masks_reframed.numpy()
viz_utils.visualize_boxes_and_labels_on_image_array(
image_np_with_mask[0],
result['detection_boxes'][0],
(result['detection_classes'][0] + label_id_offset).astype(int),
result['detection_scores'][0],
category_index,
use_normalized_coordinates=True,
max_boxes_to_draw=200,
min_score_thresh=.30,
agnostic_mode=False,
instance_masks=result.get('detection_masks_reframed', None),
line_thickness=8)
plt.figure(figsize=(24,32))
plt.imshow(image_np_with_mask[0])
plt.show()