
객체 감지기는 알려진 객체 세트 중 어떤 것이 존재할 수 있는지 식별하고 주어진 이미지 또는 비디오 스트림 내에서 이러한 객체의 위치에 대한 정보를 제공할 수 있습니다. 객체 감지기는 여러 객체 클래스의 유무와 위치를 감지하도록 훈련됩니다. 예를 들어, 다양한 과일 조각이 포함된 이미지와 함께 과일 이미지가 나타내는 과일의 클래스(예: 사과, 바나나 또는 딸기)를 지정하는 레이블 및 각 객체가 이미지에 나타나는 위치를 지정하는 데이터로 모델을 훈련할 수 있습니다. 객체 감지기에 대한 자세한 내용은 객체 감지 소개를 참조하세요.
작업 라이브러리 ObjectDetector API를 사용하여 사용자 정의 객체 감지기 또는 사전 훈련된 감지기를 모델 앱에 배포합니다.
ObjectDetector API의 주요 특징
회전, 크기 조정 및 색 공간 변환을 포함한 입력 이미지 처리
레이블 맵 로케일
결과를 필터링하기 위한 스코어 임계값
Top-k 감지 결과
레이블 허용 목록 및 거부 목록
지원되는 객체 감지기 모델
다음 모델은 ObjectDetector API와의 호환성이 보장됩니다.
AutoML Vision Edge 객체 감지로 만든 모델
모델 호환성 요구 사항을 충족하는 사용자 정의 모델
Java에서 추론 실행하기
Android 앱에서 ObjectDetector를 사용하는 방법의 예를 보려면 객체 감지 참조 앱을 참조하세요.
1단계: Gradle 종속성 및 기타 설정 가져오기
.tflite 모델 파일을 모델이 실행될 Android 모듈의 assets 디렉토리에 복사합니다. 파일을 압축하지 않도록 지정하고 TensorFlow Lite 라이브러리를 모듈의 build.gradle 파일에 추가합니다.
android {
// Other settings
// Specify tflite file should not be compressed for the app apk
aaptOptions {
noCompress "tflite"
}
}
dependencies {
// Other dependencies
// Import the Task Vision Library dependency (NNAPI is included)
implementation 'org.tensorflow:tensorflow-lite-task-vision'
// Import the GPU delegate plugin Library for GPU inference
implementation 'org.tensorflow:tensorflow-lite-gpu-delegate-plugin'
}
참고: Android Gradle 플러그인 버전 4.1부터는 .tflite가 기본적으로 noCompress 목록에 추가되며 위의 aaptOptions는 더 이상 필요하지 않습니다.
2단계: 모델 사용하기
// Initialization
ObjectDetectorOptions options =
ObjectDetectorOptions.builder()
.setBaseOptions(BaseOptions.builder().useGpu().build())
.setMaxResults(1)
.build();
ObjectDetector objectDetector =
ObjectDetector.createFromFileAndOptions(
context, modelFile, options);
// Run inference
List<Detection> results = objectDetector.detect(image);
ObjectDetector를 구성하는 추가 옵션은 소스 코드 및 javadoc를 참조하세요.
iOS에서 추론 실행하기
1단계: 종속성 설치하기
작업 라이브러리는 CocoaPods를 사용한 설치를 지원합니다. 시스템에 CocoaPods가 설치되어 있는지 확인하세요. 지침은 CocoaPods 설치 가이드를 참조하세요.
Xcode 프로젝트에 포드를 추가하는 방법에 대한 자세한 내용은 CocoaPods 가이드를 참조하세요.
Podfile에 TensorFlowLiteTaskVision 포드를 추가합니다.
target 'MyAppWithTaskAPI' do
use_frameworks!
pod 'TensorFlowLiteTaskVision'
end
추론에 사용할 .tflite 모델이 앱 번들에 있어야 합니다.
2단계: 모델 사용하기
Swift
// Imports
import TensorFlowLiteTaskVision
// Initialization
guard let modelPath = Bundle.main.path(forResource: "ssd_mobilenet_v1",
ofType: "tflite") else { return }
let options = ObjectDetectorOptions(modelPath: modelPath)
// Configure any additional options:
// options.classificationOptions.maxResults = 3
let detector = try ObjectDetector.detector(options: options)
// Convert the input image to MLImage.
// There are other sources for MLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
guard let image = UIImage (named: "cats_and_dogs.jpg"), let mlImage = MLImage(image: image) else { return }
// Run inference
let detectionResult = try detector.detect(mlImage: mlImage)
Objective C
// Imports
#import <TensorFlowLiteTaskVision/TFLTaskVision.h>
// Initialization
NSString *modelPath = [[NSBundle mainBundle] pathForResource:@"ssd_mobilenet_v1" ofType:@"tflite"];
TFLObjectDetectorOptions *options = [[TFLObjectDetectorOptions alloc] initWithModelPath:modelPath];
// Configure any additional options:
// options.classificationOptions.maxResults = 3;
TFLObjectDetector *detector = [TFLObjectDetector objectDetectorWithOptions:options
error:nil];
// Convert the input image to MLImage.
UIImage *image = [UIImage imageNamed:@"dogs.jpg"];
// There are other sources for GMLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
GMLImage *gmlImage = [[GMLImage alloc] initWithImage:image];
// Run inference
TFLDetectionResult *detectionResult = [detector detectWithGMLImage:gmlImage error:nil];
TFLObjectDetector 구성을 위한 추가 옵션은 소스 코드를 참조하세요.
Python에서 추론 실행하기
1단계: pip 패키지 설치하기
pip install tflite-support
2단계: 모델 사용하기
# Imports
from tflite_support.task import vision
from tflite_support.task import core
from tflite_support.task import processor
# Initialization
base_options = core.BaseOptions(file_name=model_path)
detection_options = processor.DetectionOptions(max_results=2)
options = vision.ObjectDetectorOptions(base_options=base_options, detection_options=detection_options)
detector = vision.ObjectDetector.create_from_options(options)
# Alternatively, you can create an object detector in the following manner:
# detector = vision.ObjectDetector.create_from_file(model_path)
# Run inference
image = vision.TensorImage.create_from_file(image_path)
detection_result = detector.detect(image)
ObjectDetector를 구성하기 위한 추가 옵션은 소스 코드를 참조하세요.
C++에서 추론 실행하기
// Initialization
ObjectDetectorOptions options;
options.mutable_base_options()->mutable_model_file()->set_file_name(model_path);
std::unique_ptr<ObjectDetector> object_detector = ObjectDetector::CreateFromOptions(options).value();
// Create input frame_buffer from your inputs, `image_data` and `image_dimension`.
// See more information here: tensorflow_lite_support/cc/task/vision/utils/frame_buffer_common_utils.h
std::unique_ptr<FrameBuffer> frame_buffer = CreateFromRgbRawBuffer(
image_data, image_dimension);
// Run inference
const DetectionResult result = object_detector->Detect(*frame_buffer).value();
ObjectDetector를 구성하기 위한 추가 옵션은 소스 코드를 참조하세요.
예제 결과
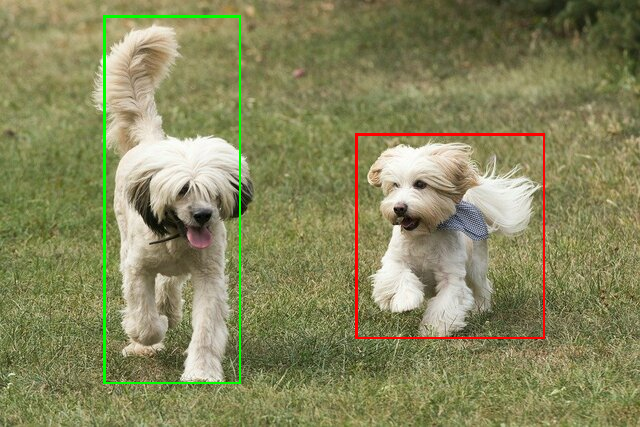
다음은 TensorFlow Hub에서 ssd mobilenet v1의 감지 결과를 보여주는 예입니다.

Results:
Detection #0 (red):
Box: (x: 355, y: 133, w: 190, h: 206)
Top-1 class:
index : 17
score : 0.73828
class name : dog
Detection #1 (green):
Box: (x: 103, y: 15, w: 138, h: 369)
Top-1 class:
index : 17
score : 0.73047
class name : dog
경계 상자를 입력 이미지에 렌더링합니다.
자체 모델 및 테스트 데이터로 간단한 ObjectDetector용 CLI 데모 도구를 시도해 보세요.
모델 호환성 요구 사항
ObjectDetector API는 필수 TFLite 모델 메타데이터가 있는 TFLite 모델을 예상합니다. TensorFlow Lite Metadata Writer API를 사용하여 객체 감지기에 대한 메타데이터를 생성하는 예를 참조하세요.
호환되는 객체 감지기 모델은 다음 요구 사항을 충족해야 합니다.
입력 이미지 텐서: (kTfLiteUInt8/kTfLiteFloat32)
- 이미지 입력 크기는
[batch x height x width x channels]입니다. - 배치 추론은 지원되지 않습니다(
batch는 1이어야 함). - RGB 입력만 지원됩니다(
channels은 3이어야 함). - 유형이 kTfLiteFloat32인 경우, 입력 정규화를 위해 NormalizationOptions를 메타데이터에 첨부해야 합니다.
- 이미지 입력 크기는
출력 텐서는
DetectionPostProcessop의 4개 출력이어야 합니다. 즉, 다음과 같습니다.위치 텐서(kTfLiteFloat32)
[1 x num_results x 4]크기의 텐서, [top, left, right, bottom] 형식의 경계 상자를 나타내는 내부 배열입니다.- BoundingBoxProperties는 메타데이터에 첨부되어야 하며
type=BOUNDARIES및 `coordinate_type = RATIO를 지정해야 합니다.
클래스 텐서(kTfLiteFloat32)
[1 x num_results]크기의 텐서, 각 값은 클래스의 정수 인덱스를 나타냅니다.- 선택적(그러나 권장함) 레이블 맵은 한 줄에 하나의 레이블을 포함하여 TENSOR_VALUE_LABELS 유형의 AssociatedFile-s로 첨부할 수 있습니다. 예제 레이블 파일을 참조하세요. 이러한 첫 번째 AssociatedFile(있는 경우)은 결과의
class_name필드를 채우는 데 사용됩니다.display_name필드는 생성 시 사용된ObjectDetectorOptions의display_names_locale필드와 로케일이 일치하는 AssociatedFile(있는 경우)로부터 채워집니다(기본적으로 "en", 즉 영어). 이들 중 어느 것도 사용할 수 없는 경우, 결과의index필드만 채워집니다.
스코어 텐서(kTfLiteFloat32)
[1 x num_results]크기의 텐서, 각 값은 감지된 객체의 스코어를 나타냅니다.
감지 텐서의 수(kTfLiteFloat32)
[1]크기의 텐서인 정수 num_results