
 GitHub でソースを表示 GitHub でソースを表示 |
このチュートリアルは、TensorFlow を使用した時系列予測を紹介します。畳み込みおよび回帰ニューラルネットワーク(CNN および RNN)を含む様々なスタイルのモデルを構築します。
ここでは、2 つの主要部分をサブセクションとともに説明しています。
- 単一の時間ステップの予測
- 単一の特徴量。
- すべての特徴量。
- 複数のステップの予測
- シングルショット: すべての予測を一度に行います。
- 自動回帰: 一度に 1 つの予測を行い、出力をモデルにフィードし直します。
セットアップ
import os
import datetime
import IPython
import IPython.display
import matplotlib as mpl
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import seaborn as sns
import tensorflow as tf
mpl.rcParams['figure.figsize'] = (8, 6)
mpl.rcParams['axes.grid'] = False
2024-01-11 20:36:55.595591: E external/local_xla/xla/stream_executor/cuda/cuda_dnn.cc:9261] Unable to register cuDNN factory: Attempting to register factory for plugin cuDNN when one has already been registered 2024-01-11 20:36:55.595635: E external/local_xla/xla/stream_executor/cuda/cuda_fft.cc:607] Unable to register cuFFT factory: Attempting to register factory for plugin cuFFT when one has already been registered 2024-01-11 20:36:55.597247: E external/local_xla/xla/stream_executor/cuda/cuda_blas.cc:1515] Unable to register cuBLAS factory: Attempting to register factory for plugin cuBLAS when one has already been registered
気象データセット
このチュートリアルでは、マックス・プランク生物地球化学研究所が記録した気象の時系列データセットを使用します。
このデータセットには、気温、気圧、および湿度といった 14 個特徴量が含まれます。これらは、2003 年から 10 分ごとに収集されたデータです。効率化を図るために、2009 年から 2016 年までに収集されたデータのみを使用します。このセクションのデータセットは、「Deep Learning with Python」向けに著者 François Chollet 本人によって準備されました。
zip_path = tf.keras.utils.get_file(
origin='https://storage.googleapis.com/tensorflow/tf-keras-datasets/jena_climate_2009_2016.csv.zip',
fname='jena_climate_2009_2016.csv.zip',
extract=True)
csv_path, _ = os.path.splitext(zip_path)
Downloading data from https://storage.googleapis.com/tensorflow/tf-keras-datasets/jena_climate_2009_2016.csv.zip 13568290/13568290 [==============================] - 0s 0us/step
このチュートリアルでは、時間ごとの予測のみを使用するため、10 分間隔のデータを 1 時間間隔にサブサンプリングしましょう。
df = pd.read_csv(csv_path)
# Slice [start:stop:step], starting from index 5 take every 6th record.
df = df[5::6]
date_time = pd.to_datetime(df.pop('Date Time'), format='%d.%m.%Y %H:%M:%S')
データをのぞいてみましょう。最初の数行は、次のようになっています。
df.head()
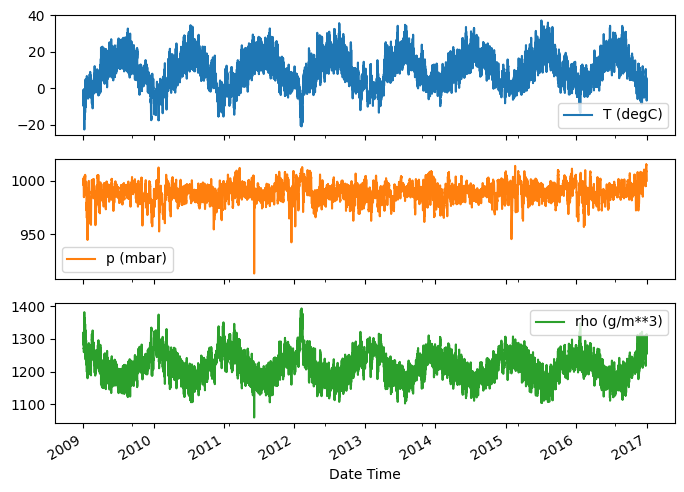
時が経過するにつれ、いくつかの特徴量は次のように変化しています。
plot_cols = ['T (degC)', 'p (mbar)', 'rho (g/m**3)']
plot_features = df[plot_cols]
plot_features.index = date_time
_ = plot_features.plot(subplots=True)
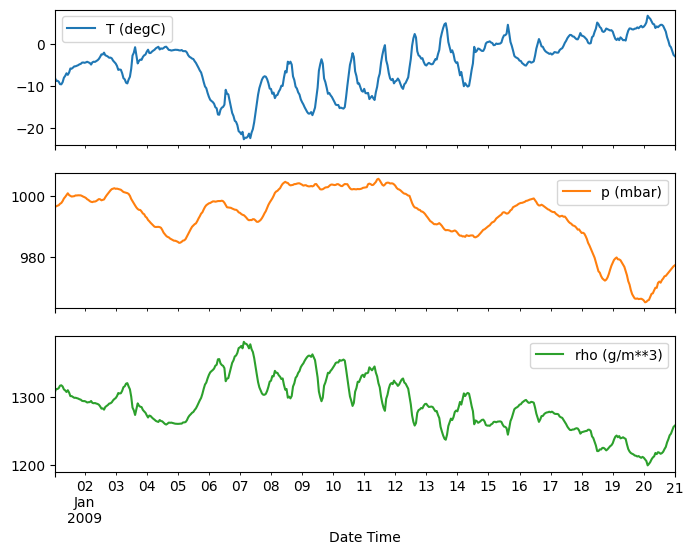
plot_features = df[plot_cols][:480]
plot_features.index = date_time[:480]
_ = plot_features.plot(subplots=True)
検査とクリーンアップ
次に、データセットの統計を確認してみましょう。
df.describe().transpose()
風速
風速の min 値(wv (m/s))と最大値(max. wv (m/s))列が目立つはずです。この -9999 は誤りの可能性があります。
これとは別に、風向の列があるため、風速はゼロより大きい値(>=0)でなければなりません。これをゼロに置き換えましょう。
wv = df['wv (m/s)']
bad_wv = wv == -9999.0
wv[bad_wv] = 0.0
max_wv = df['max. wv (m/s)']
bad_max_wv = max_wv == -9999.0
max_wv[bad_max_wv] = 0.0
# The above inplace edits are reflected in the DataFrame.
df['wv (m/s)'].min()
0.0
特徴量エンジニアリング
モデルの構築を始める前に、データを理解しておくことが重要です。また、モデルに適切にフォーマットされたデータを渡していることも確認する必要があります。
風
データの最後の列にある wd (deg) は、角度単位の風向を示します。角度は、モデル入力には適していません。360° と 0° は互いに近く、スムーズに回り込む必要があります。風が吹いていない場合は、向きは関係ありません。
現時点では、風のデータの分布は次のようになっています。
plt.hist2d(df['wd (deg)'], df['wv (m/s)'], bins=(50, 50), vmax=400)
plt.colorbar()
plt.xlabel('Wind Direction [deg]')
plt.ylabel('Wind Velocity [m/s]')
Text(0, 0.5, 'Wind Velocity [m/s]')
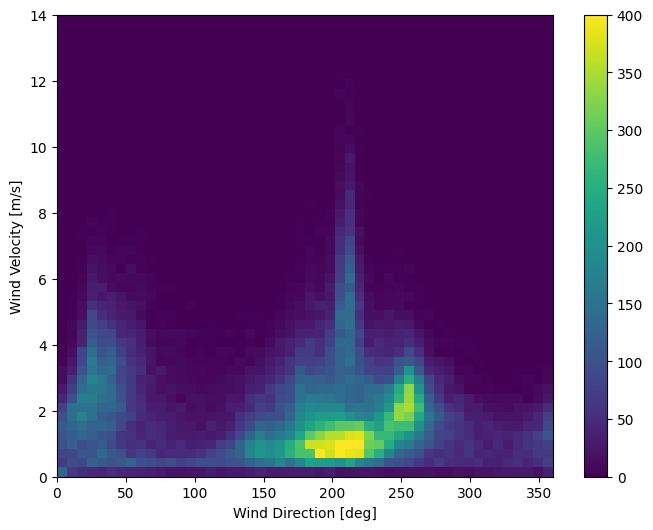
ただし、風向と風速の列を風のベクトルに変換すると、モデルを解釈しやすくなります。
wv = df.pop('wv (m/s)')
max_wv = df.pop('max. wv (m/s)')
# Convert to radians.
wd_rad = df.pop('wd (deg)')*np.pi / 180
# Calculate the wind x and y components.
df['Wx'] = wv*np.cos(wd_rad)
df['Wy'] = wv*np.sin(wd_rad)
# Calculate the max wind x and y components.
df['max Wx'] = max_wv*np.cos(wd_rad)
df['max Wy'] = max_wv*np.sin(wd_rad)
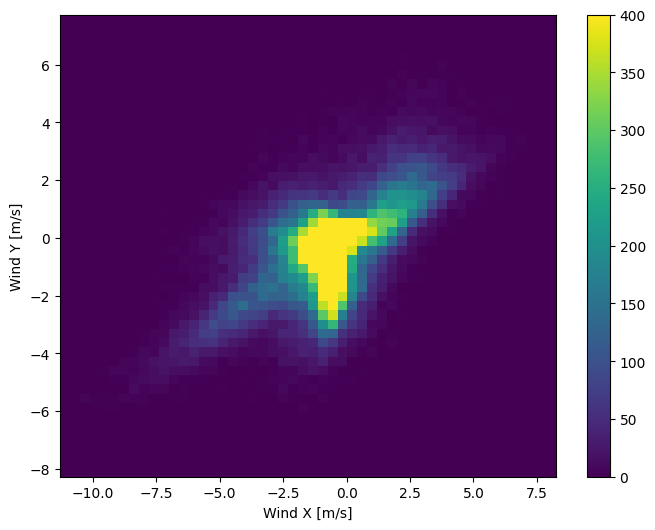
モデルを正しく解釈する上で、風ベクトルの分布ははるかに単純です。
plt.hist2d(df['Wx'], df['Wy'], bins=(50, 50), vmax=400)
plt.colorbar()
plt.xlabel('Wind X [m/s]')
plt.ylabel('Wind Y [m/s]')
ax = plt.gca()
ax.axis('tight')
(-11.305513973134667, 8.24469928549079, -8.27438540335515, 7.7338312955467785)
時刻
同様に、Date Time 列は非常に便利ですが、この文字列の形態ではそうでもありません。そこで、秒に変換することにします。
timestamp_s = date_time.map(pd.Timestamp.timestamp)
風向と同様に、秒単位の時間は、使いやすいモデル入力ではありません。気象データであるため、明確な日単位および年単位の周期性があります。周期の操作には、様々な方法があります。
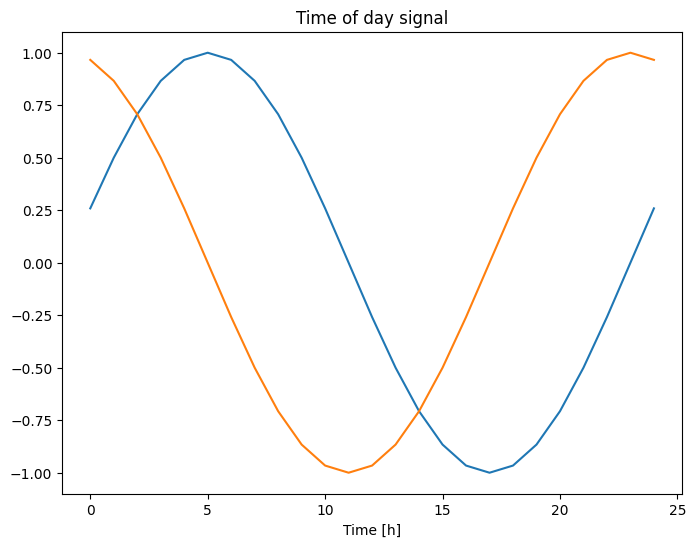
使いやすい信号は、サインとコサインで明確な「Time of day(時刻)」と「Time of year(時期)」信号に変換して取得できます。
day = 24*60*60
year = (365.2425)*day
df['Day sin'] = np.sin(timestamp_s * (2 * np.pi / day))
df['Day cos'] = np.cos(timestamp_s * (2 * np.pi / day))
df['Year sin'] = np.sin(timestamp_s * (2 * np.pi / year))
df['Year cos'] = np.cos(timestamp_s * (2 * np.pi / year))
plt.plot(np.array(df['Day sin'])[:25])
plt.plot(np.array(df['Day cos'])[:25])
plt.xlabel('Time [h]')
plt.title('Time of day signal')
Text(0.5, 1.0, 'Time of day signal')
こうすることで、モデルはほとんどの重要な頻度特徴量にアクセスできるようになります。この場合、前もってどの頻度が重要であるかがわかっていました。
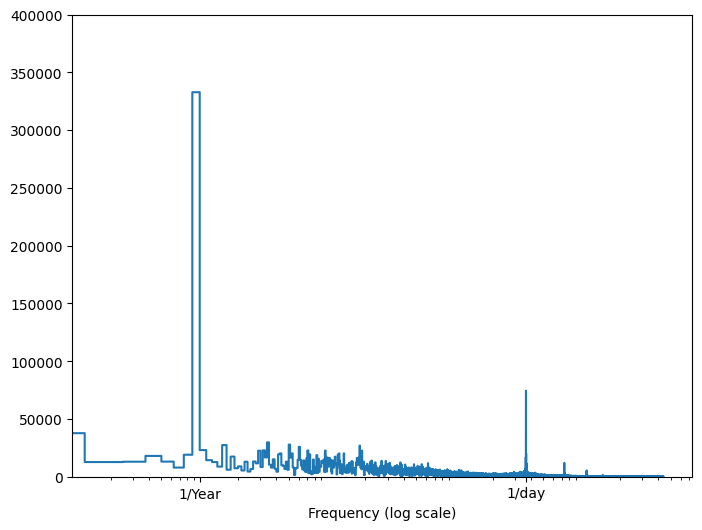
その情報がない場合は、高速フーリエ変換で特徴量を抽出し、どの周波数が重要であるかを判断することができます。予想を確認するために、以下に、時間の経過に伴う気温の tf.signal.rfft を示します。1/year と 1/day に近い周波数で明確なピークに注意してください。
fft = tf.signal.rfft(df['T (degC)'])
f_per_dataset = np.arange(0, len(fft))
n_samples_h = len(df['T (degC)'])
hours_per_year = 24*365.2524
years_per_dataset = n_samples_h/(hours_per_year)
f_per_year = f_per_dataset/years_per_dataset
plt.step(f_per_year, np.abs(fft))
plt.xscale('log')
plt.ylim(0, 400000)
plt.xlim([0.1, max(plt.xlim())])
plt.xticks([1, 365.2524], labels=['1/Year', '1/day'])
_ = plt.xlabel('Frequency (log scale)')
データを分割する
トレーニング、検証、およびテスト用のセットとして、(70%, 20%, 10%) に分割したものを使用します。データの分割前に、ランダムにシャッフルされていないことに注意してください。これには、次の 2 つの理由があります。
- 連続したサンプルの期間にデータが分割されていることを確実にするため。
- 検証/テストの結果がより現実的で、モデルがトレーニングされた後に収集されたデータを評価できるようにするため。
column_indices = {name: i for i, name in enumerate(df.columns)}
n = len(df)
train_df = df[0:int(n*0.7)]
val_df = df[int(n*0.7):int(n*0.9)]
test_df = df[int(n*0.9):]
num_features = df.shape[1]
データを正規化する
ニューラルネットワークをトレーニングする前に特徴量をスケーリングすることが重要です。正規化は、このスケーリングを行うための一般的な方法です。平均を減算して各特徴量の標準偏差で除算します。
平均と標準偏差は、モデルが検証とテストのセットにある値にアクセスできないように、トレーニングデータを使用してのみ計算する必要があります。
また、モデルがトレーニング中にトレーニングセットの未来の値にアクセスしないことと、この正規化が、移動する平均を使用して行われるようにすることにも論拠があります。このことは、このチュートリアルの焦点ではなく、検証とテストのセットによって、(ある程度)正直な指標が得られるようになっています。そのため、単純化するために、このチュートリアルでは、単純な平均を使用しています。
train_mean = train_df.mean()
train_std = train_df.std()
train_df = (train_df - train_mean) / train_std
val_df = (val_df - train_mean) / train_std
test_df = (test_df - train_mean) / train_std
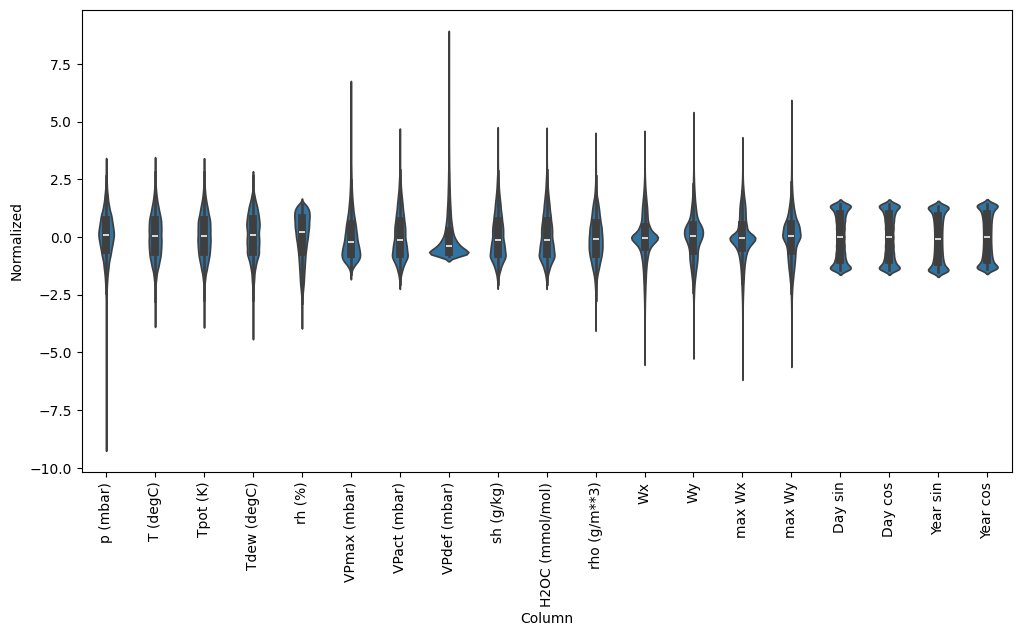
では、特徴量の分布をみてみましょう。いくつかの特徴量には実際にロングテールがありますが、-9999 の風速値のような明確な誤差はありません。
df_std = (df - train_mean) / train_std
df_std = df_std.melt(var_name='Column', value_name='Normalized')
plt.figure(figsize=(12, 6))
ax = sns.violinplot(x='Column', y='Normalized', data=df_std)
_ = ax.set_xticklabels(df.keys(), rotation=90)
/tmpfs/tmp/ipykernel_566122/3214313372.py:5: UserWarning: set_ticklabels() should only be used with a fixed number of ticks, i.e. after set_ticks() or using a FixedLocator. _ = ax.set_xticklabels(df.keys(), rotation=90)
データのウィンドウ処理
このチュートリアルのモデルは、データの連続するサンプルのウィンドウに基づいてあるセットの予測を立てます。
入力ウィンドウの主な特徴量は次の通りです。
- 入力とラベルウィンドウの幅(時間ステップ数)
- それらの時間オフセット
- どの特徴量が入力かラベル、またはこの両方として使用されているか
このチュートリアルは、様々なモデル(線形、DNN、CNN、および RNN モデル)を構築し、次の両方に対して使用します。
- 単一出力および複数出力予測。
- 単一時間ステップと複数時間ステップ予測。
このセクションでは、こういったすべてのモデルに再利用できるようにデータウィンドウ処理を実装することに焦点を当てています。
モデルのタスクと種類に応じて、様々なデータウィンドウを生成するようにするとよいでしょう。次にいくつかのサンプルを示します。
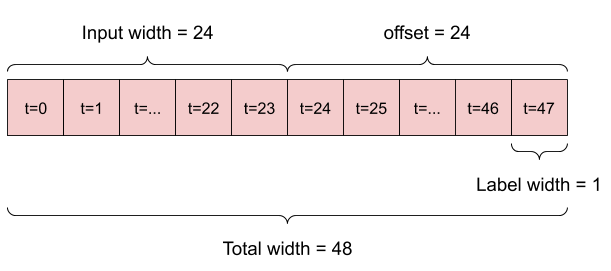
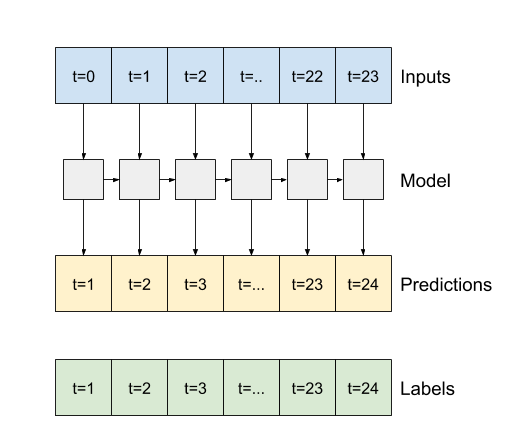
- たとえば、24 時間先の単一予測を立てるには、過去 24 時間の履歴を指定し、次のようにウィンドウを定義することができます。
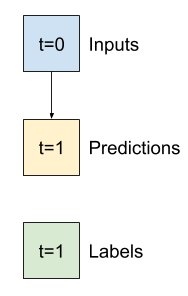
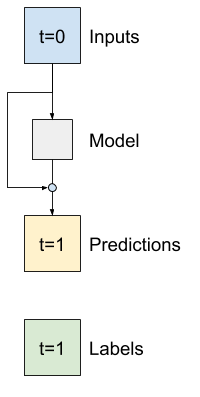
- 1 時間先の予測を立てるモデルは、過去 6 時間の履歴を指定した場合、次のようにウィンドウを定義する必要があります。
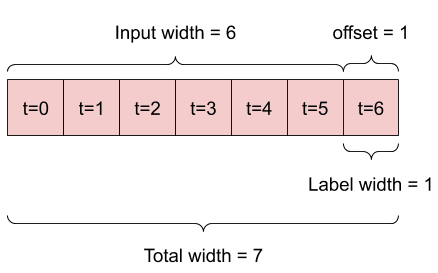
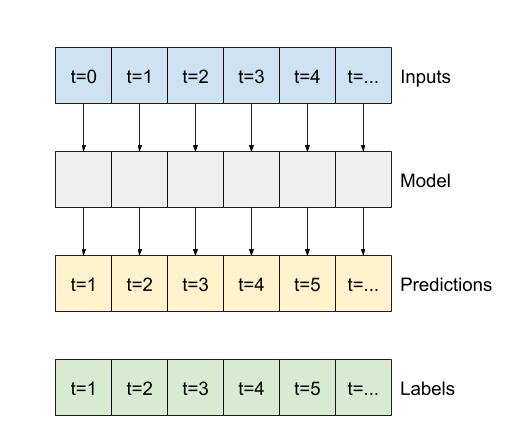
このセクションの残りの部分では、WindowGenerator クラスを定義します。このクラスは、次の項目を行えます。
- インデックスとオフセットを、上記の図に示されるように処理する。
- 特徴量のウィンドウを
(features, labels)ペアに分割する。 - 結果のウィンドウのコンテンツをプロットする。
- トレーニング、評価、およびテストデータからのこれらのウィンドウのバッチを、
tf.data.Datasetを使用して効率的に生成する。
1. インデックスとオフセット
WindowGenerator クラスの作成から始めます。__init__ メソッドには、入力とラベルインデックスに必要なすべての論理が含まれます。
また、トレーニング、評価、およびテストの DataFrames を入力として取ります。これらは、後でウィンドウの tf.data.Dataset に変換されます。
class WindowGenerator():
def __init__(self, input_width, label_width, shift,
train_df=train_df, val_df=val_df, test_df=test_df,
label_columns=None):
# Store the raw data.
self.train_df = train_df
self.val_df = val_df
self.test_df = test_df
# Work out the label column indices.
self.label_columns = label_columns
if label_columns is not None:
self.label_columns_indices = {name: i for i, name in
enumerate(label_columns)}
self.column_indices = {name: i for i, name in
enumerate(train_df.columns)}
# Work out the window parameters.
self.input_width = input_width
self.label_width = label_width
self.shift = shift
self.total_window_size = input_width + shift
self.input_slice = slice(0, input_width)
self.input_indices = np.arange(self.total_window_size)[self.input_slice]
self.label_start = self.total_window_size - self.label_width
self.labels_slice = slice(self.label_start, None)
self.label_indices = np.arange(self.total_window_size)[self.labels_slice]
def __repr__(self):
return '\n'.join([
f'Total window size: {self.total_window_size}',
f'Input indices: {self.input_indices}',
f'Label indices: {self.label_indices}',
f'Label column name(s): {self.label_columns}'])
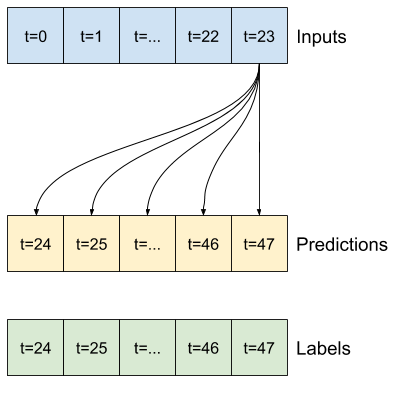
以下は、このセクションの始めの図に示された 2 つのウィンドウを作成するコードです。
w1 = WindowGenerator(input_width=24, label_width=1, shift=24,
label_columns=['T (degC)'])
w1
Total window size: 48 Input indices: [ 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23] Label indices: [47] Label column name(s): ['T (degC)']
w2 = WindowGenerator(input_width=6, label_width=1, shift=1,
label_columns=['T (degC)'])
w2
Total window size: 7 Input indices: [0 1 2 3 4 5] Label indices: [6] Label column name(s): ['T (degC)']
2. 分割
リストの連続入力がある場合、split_window メソッドはこれらを入力のウィンドウとラベルのウィンドウに変換します。
前に定義した例の w2 は次のように分割されます。

この図は、データの features 軸を表示しませんが、この split_window 関数は、label_columns も処理するため、単一出力と複数出力の例の両方に使用できます。
def split_window(self, features):
inputs = features[:, self.input_slice, :]
labels = features[:, self.labels_slice, :]
if self.label_columns is not None:
labels = tf.stack(
[labels[:, :, self.column_indices[name]] for name in self.label_columns],
axis=-1)
# Slicing doesn't preserve static shape information, so set the shapes
# manually. This way the `tf.data.Datasets` are easier to inspect.
inputs.set_shape([None, self.input_width, None])
labels.set_shape([None, self.label_width, None])
return inputs, labels
WindowGenerator.split_window = split_window
次を試します。
# Stack three slices, the length of the total window.
example_window = tf.stack([np.array(train_df[:w2.total_window_size]),
np.array(train_df[100:100+w2.total_window_size]),
np.array(train_df[200:200+w2.total_window_size])])
example_inputs, example_labels = w2.split_window(example_window)
print('All shapes are: (batch, time, features)')
print(f'Window shape: {example_window.shape}')
print(f'Inputs shape: {example_inputs.shape}')
print(f'Labels shape: {example_labels.shape}')
All shapes are: (batch, time, features) Window shape: (3, 7, 19) Inputs shape: (3, 6, 19) Labels shape: (3, 1, 1)
通常 TensorFlow のデータは、最も外側のインデックスがサンプル全体である配列にパックされます(「batch」次元)。中央のインデックスは、「time」または「space」(width, height)次元です。最も内側のインデックスは特徴量です。
上記のコードは、バッチ 3、7 時間ステップウィンドウ、各時間ステップに 19 個の特徴量を取りました。これを 6 時間ステップ、19 個の特徴量入力、および 1 時間ステップ 1 特徴量ラベルに分割しました。ラベルには、WindowGenerator が label_columns=['T (degC)'] で初期化されたため、1 つの特徴量しかありません。最初に、このチュートリアルは単一出力ラベルを予測するモデルを構築します。
3. プロット
以下は、分割ウィンドウを単純に視覚化できる描画(plot)メソッドです。
w2.example = example_inputs, example_labels
def plot(self, model=None, plot_col='T (degC)', max_subplots=3):
inputs, labels = self.example
plt.figure(figsize=(12, 8))
plot_col_index = self.column_indices[plot_col]
max_n = min(max_subplots, len(inputs))
for n in range(max_n):
plt.subplot(max_n, 1, n+1)
plt.ylabel(f'{plot_col} [normed]')
plt.plot(self.input_indices, inputs[n, :, plot_col_index],
label='Inputs', marker='.', zorder=-10)
if self.label_columns:
label_col_index = self.label_columns_indices.get(plot_col, None)
else:
label_col_index = plot_col_index
if label_col_index is None:
continue
plt.scatter(self.label_indices, labels[n, :, label_col_index],
edgecolors='k', label='Labels', c='#2ca02c', s=64)
if model is not None:
predictions = model(inputs)
plt.scatter(self.label_indices, predictions[n, :, label_col_index],
marker='X', edgecolors='k', label='Predictions',
c='#ff7f0e', s=64)
if n == 0:
plt.legend()
plt.xlabel('Time [h]')
WindowGenerator.plot = plot
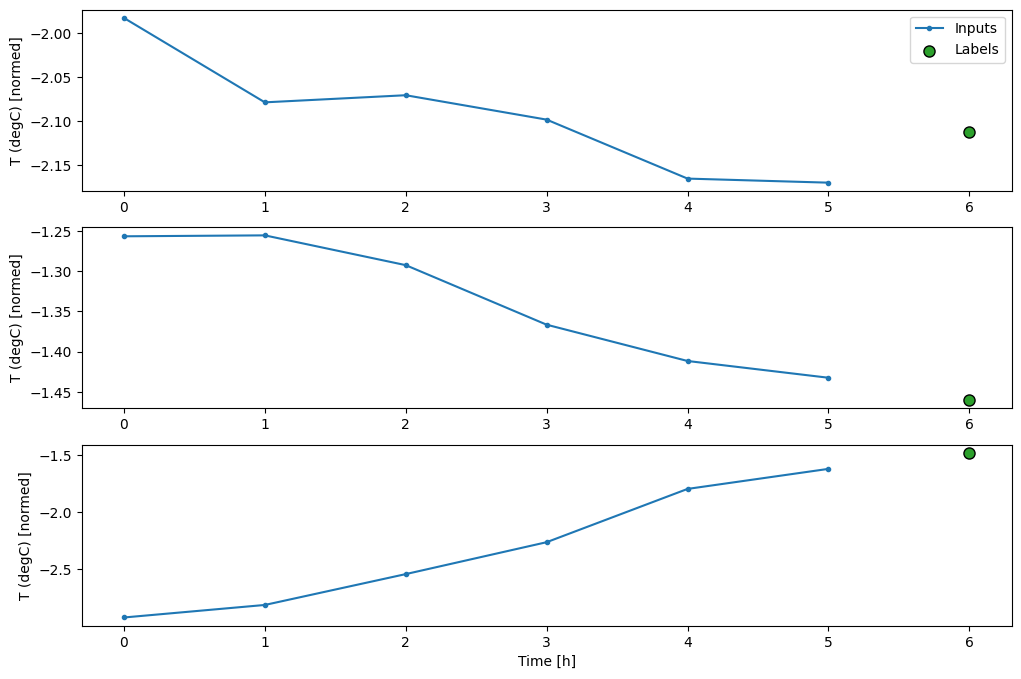
この図は、入力、ラベル、および(後の)予測を、項目が参照する時間に基づいて整列します。
w2.plot()
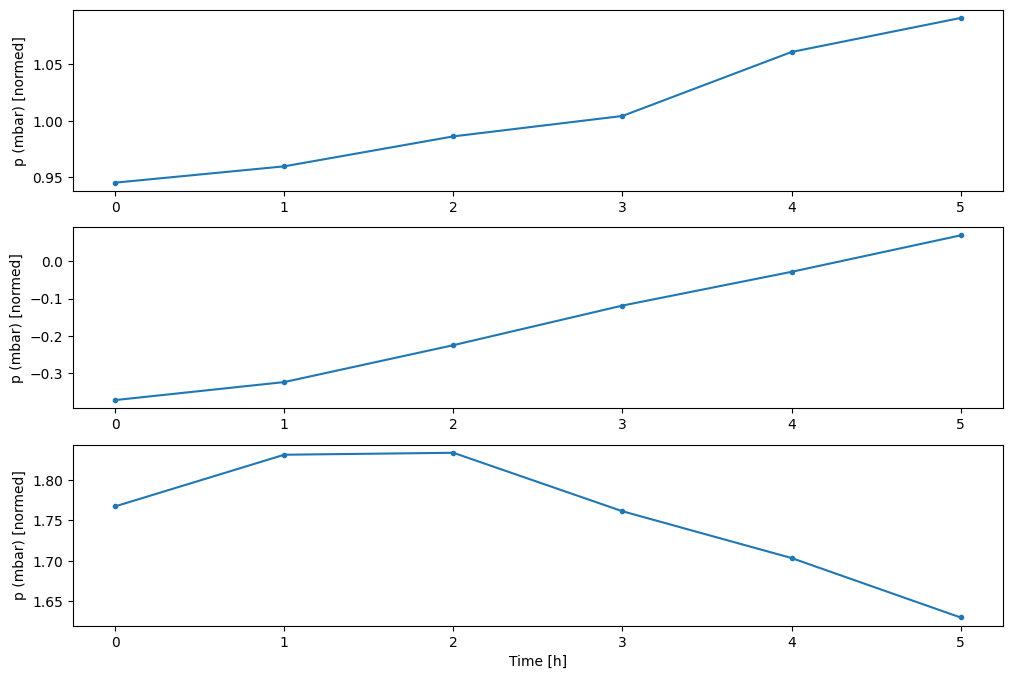
ほかの列をプロットすることはできますが、サンプルウィンドウ w2 構成には、T (degC) 列のラベルしかありません。
w2.plot(plot_col='p (mbar)')
4. tf.data.Dataset を作成する
最後に、この make_dataset メソッドは時系列 DataFrame を取って、tf.keras.utils.timeseries_dataset_from_array 関数を使用して (input_window, label_window) ペアの tf.data.Dataset に変換します。
def make_dataset(self, data):
data = np.array(data, dtype=np.float32)
ds = tf.keras.utils.timeseries_dataset_from_array(
data=data,
targets=None,
sequence_length=self.total_window_size,
sequence_stride=1,
shuffle=True,
batch_size=32,)
ds = ds.map(self.split_window)
return ds
WindowGenerator.make_dataset = make_dataset
WindowGenerator オブジェクトには、トレーニング、検証、およびテストのデータが含まれます。
これらにアクセスするためのプロパティを tf.data.Dataset として追加し、前に定義したmake_dataset メソッドを使用します。また、標準のサンプルバッチを追加して、簡単にアクセスして描画できるようにします。
@property
def train(self):
return self.make_dataset(self.train_df)
@property
def val(self):
return self.make_dataset(self.val_df)
@property
def test(self):
return self.make_dataset(self.test_df)
@property
def example(self):
"""Get and cache an example batch of `inputs, labels` for plotting."""
result = getattr(self, '_example', None)
if result is None:
# No example batch was found, so get one from the `.train` dataset
result = next(iter(self.train))
# And cache it for next time
self._example = result
return result
WindowGenerator.train = train
WindowGenerator.val = val
WindowGenerator.test = test
WindowGenerator.example = example
WindowGenerator オブジェクトにより、tf.data.Dataset オブジェクトにアクセスできるようになったため、データを簡単にイテレートできるようになりました。
Dataset.element_spec プロパティは、データセット要素の構造、データ型、および形状を示します。
# Each element is an (inputs, label) pair.
w2.train.element_spec
(TensorSpec(shape=(None, 6, 19), dtype=tf.float32, name=None), TensorSpec(shape=(None, 1, 1), dtype=tf.float32, name=None))
Dataset をイテレートすると、具象バッチを得られます。
for example_inputs, example_labels in w2.train.take(1):
print(f'Inputs shape (batch, time, features): {example_inputs.shape}')
print(f'Labels shape (batch, time, features): {example_labels.shape}')
Inputs shape (batch, time, features): (32, 6, 19) Labels shape (batch, time, features): (32, 1, 1)
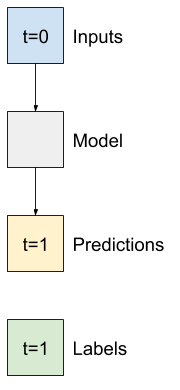
単一ステップモデル
このようなデータで構築できる最も単純なモデルは、現在の条件のみに基づいて、1 時間ステップ(1 時間)先までの単一の特徴量の値を予測するモデルです。
そのため、1 時間先までの T (degC) 値を予測するモデルを構築することにします。
WindowGenerator オブジェクトを構成して、これらの単一ステップ (input, label) ペアを生成します。
single_step_window = WindowGenerator(
input_width=1, label_width=1, shift=1,
label_columns=['T (degC)'])
single_step_window
Total window size: 2 Input indices: [0] Label indices: [1] Label column name(s): ['T (degC)']
window オブジェクトは、トレーニング、検証、およびテストのセットから tf.data.Datasets 作成し、データのバッチを簡単にイテレートできるようにします。
for example_inputs, example_labels in single_step_window.train.take(1):
print(f'Inputs shape (batch, time, features): {example_inputs.shape}')
print(f'Labels shape (batch, time, features): {example_labels.shape}')
Inputs shape (batch, time, features): (32, 1, 19) Labels shape (batch, time, features): (32, 1, 1)
基準
トレーニング可能なモデルを構築する前に、後のより複雑なモデルと比較するための基準ポイントとして、パフォーマンス基準を設定します。
最初のタスクは、すべての特徴量の現在の値がある場合に、1 時間先までの気温を予測することです。現在の値には、現在の気温が含まれます。
では、現在の気温のみを予測として返し、「変化なし」と予測するモデルから始めましょう。気温はゆっくりと変化するため、これは合理的な基準と言えます。もちろん、予測をずっと先まで行う場合は、この基準はあまり機能しなくなります。
class Baseline(tf.keras.Model):
def __init__(self, label_index=None):
super().__init__()
self.label_index = label_index
def call(self, inputs):
if self.label_index is None:
return inputs
result = inputs[:, :, self.label_index]
return result[:, :, tf.newaxis]
このモデルをインスタンス化して評価します。
baseline = Baseline(label_index=column_indices['T (degC)'])
baseline.compile(loss=tf.keras.losses.MeanSquaredError(),
metrics=[tf.keras.metrics.MeanAbsoluteError()])
val_performance = {}
performance = {}
val_performance['Baseline'] = baseline.evaluate(single_step_window.val)
performance['Baseline'] = baseline.evaluate(single_step_window.test, verbose=0)
439/439 [==============================] - 1s 2ms/step - loss: 0.0128 - mean_absolute_error: 0.0785
これによって何らかのパフォーマンスメトリックが出力されましたが、このモデルがどれくらいうまく機能しているかに対する感触は得られません。
WindowGenerator には描画メソッドがありますが、サンプルが 1 つしかないのであれば、興味深いプロットにはなりません。
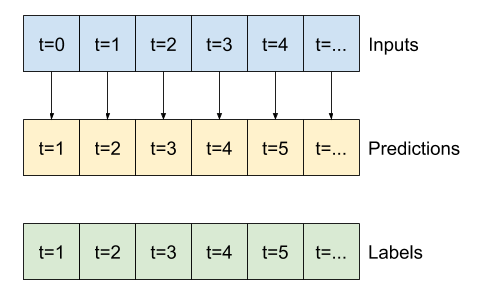
そこで、24 時間連続入力とラベルのウィンドウを一度に生成するより幅の広い WindowGenerator を作成することにします。新しい wide_window 変数によってモデルの動作が変わることはありません。モデルは引き続き、1 つの入力時間ステップに基づいて 1 時間先の予測を立てます。ここでは、time 軸は batch 軸として機能します。各予測は、時間ステップ間で相互作用のない独立した予測となります。
wide_window = WindowGenerator(
input_width=24, label_width=24, shift=1,
label_columns=['T (degC)'])
wide_window
Total window size: 25 Input indices: [ 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23] Label indices: [ 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24] Label column name(s): ['T (degC)']
コードを変更することなく、上記の拡張されたウィンドウを同じ baseline モデルに直接渡すことができます。これは、入力とラベルに同じ数の時間ステップがあり、基準は入力を出力に転送するだけであるため、可能です。
print('Input shape:', wide_window.example[0].shape)
print('Output shape:', baseline(wide_window.example[0]).shape)
Input shape: (32, 24, 19) Output shape: (32, 24, 1)
基準モデルの予測を描画すると、ラベルが 1 時間右に移動しただけであることがわかります。
wide_window.plot(baseline)
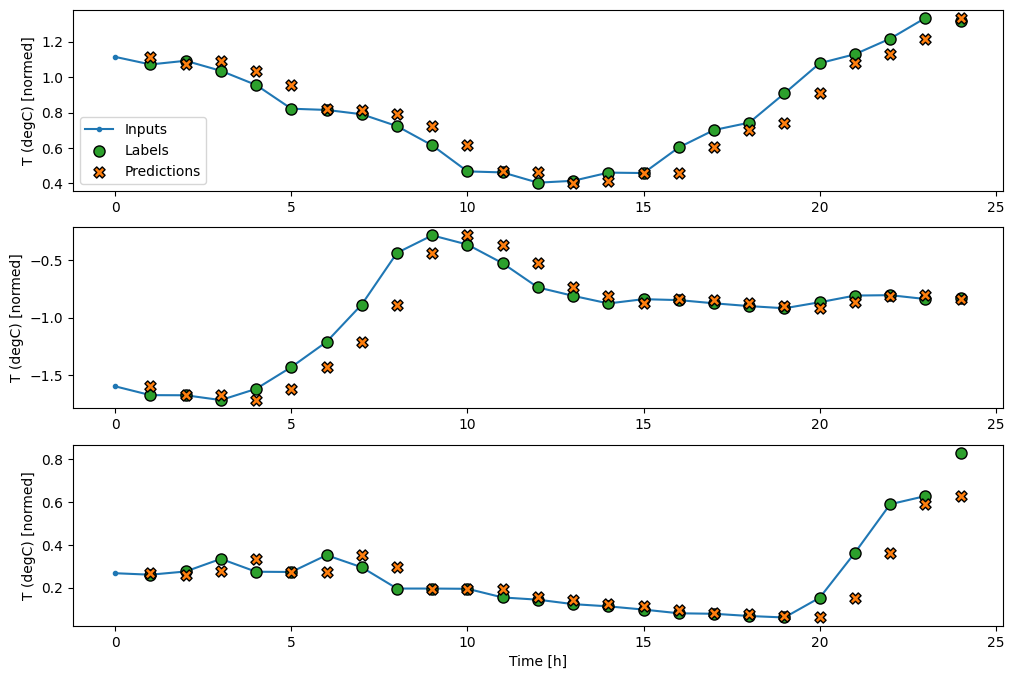
上記の 3 つの例の図には、単一ステップモデルが 24 時間分実行されています。これには、次のような理由があります。
- 青い
Inputsの線は、各時間ステップの入力気温を示します。モデルはすべての特徴量を受け取りますが、この図は気温のみを示します。 - 緑色の
Labelsの点は、ターゲットの予測値を示します。これらの点は入力時間ではなく、予測時間に示されます。そのため、ラベルの範囲は入力に対して 1 ステップ移動しています。 - オレンジ色の
Predictionsの十字は、各出力時間ステップのモデルの予測です。モデルが完璧に予測しているのであれば、予測はLabelsに着地します。
線形モデル
このタスクに適用できる最も単純なトレーニング可能なモデルは、入力と出力間に線形変換を挿入することです。この場合、ある時間ステップの出力は、そのステップのみに依存します。
activation セットのない tf.keras.layers.Dense レイヤーは線形モデルです。レイヤーはデータの最後の軸のみを (batch, time, inputs) から (batch, time, units) に変換するため、batch と time 軸の各項目に独立して適用されます。
linear = tf.keras.Sequential([
tf.keras.layers.Dense(units=1)
])
print('Input shape:', single_step_window.example[0].shape)
print('Output shape:', linear(single_step_window.example[0]).shape)
Input shape: (32, 1, 19) Output shape: (32, 1, 1)
このチュートリアルは、多くのモデルをトレーニングするため、トレーニング手順を関数にパッケージ化します。
MAX_EPOCHS = 20
def compile_and_fit(model, window, patience=2):
early_stopping = tf.keras.callbacks.EarlyStopping(monitor='val_loss',
patience=patience,
mode='min')
model.compile(loss=tf.keras.losses.MeanSquaredError(),
optimizer=tf.keras.optimizers.Adam(),
metrics=[tf.keras.metrics.MeanAbsoluteError()])
history = model.fit(window.train, epochs=MAX_EPOCHS,
validation_data=window.val,
callbacks=[early_stopping])
return history
モデルをトレーニングしてそのパフォーマンスを評価します。
history = compile_and_fit(linear, single_step_window)
val_performance['Linear'] = linear.evaluate(single_step_window.val)
performance['Linear'] = linear.evaluate(single_step_window.test, verbose=0)
Epoch 1/20 21/1534 [..............................] - ETA: 3s - loss: 5.2649 - mean_absolute_error: 1.8399 WARNING: All log messages before absl::InitializeLog() is called are written to STDERR I0000 00:00:1705005436.429000 566323 device_compiler.h:186] Compiled cluster using XLA! This line is logged at most once for the lifetime of the process. 1534/1534 [==============================] - 5s 3ms/step - loss: 0.6413 - mean_absolute_error: 0.4871 - val_loss: 0.0313 - val_mean_absolute_error: 0.1402 Epoch 2/20 1534/1534 [==============================] - 4s 3ms/step - loss: 0.0214 - mean_absolute_error: 0.1080 - val_loss: 0.0116 - val_mean_absolute_error: 0.0802 Epoch 3/20 1534/1534 [==============================] - 4s 3ms/step - loss: 0.0105 - mean_absolute_error: 0.0755 - val_loss: 0.0091 - val_mean_absolute_error: 0.0703 Epoch 4/20 1534/1534 [==============================] - 4s 3ms/step - loss: 0.0092 - mean_absolute_error: 0.0702 - val_loss: 0.0087 - val_mean_absolute_error: 0.0687 Epoch 5/20 1534/1534 [==============================] - 4s 3ms/step - loss: 0.0091 - mean_absolute_error: 0.0698 - val_loss: 0.0087 - val_mean_absolute_error: 0.0689 Epoch 6/20 1534/1534 [==============================] - 4s 3ms/step - loss: 0.0091 - mean_absolute_error: 0.0698 - val_loss: 0.0087 - val_mean_absolute_error: 0.0684 Epoch 7/20 1534/1534 [==============================] - 4s 3ms/step - loss: 0.0091 - mean_absolute_error: 0.0699 - val_loss: 0.0087 - val_mean_absolute_error: 0.0687 Epoch 8/20 1534/1534 [==============================] - 4s 3ms/step - loss: 0.0091 - mean_absolute_error: 0.0699 - val_loss: 0.0087 - val_mean_absolute_error: 0.0686 439/439 [==============================] - 1s 2ms/step - loss: 0.0087 - mean_absolute_error: 0.0686
baseline モデルと同様に、線形モデルは、ワイドウィンドウのバッチで呼び出すことができます。このように使用することで、モデルは連続した時間ステップに対して独立した一連の予測を立てます。time 軸は、別の batch 軸のように機能します。各時間ステップの予測間に相互作用はありません。
print('Input shape:', wide_window.example[0].shape)
print('Output shape:', linear(wide_window.example[0]).shape)
Input shape: (32, 24, 19) Output shape: (32, 24, 1)
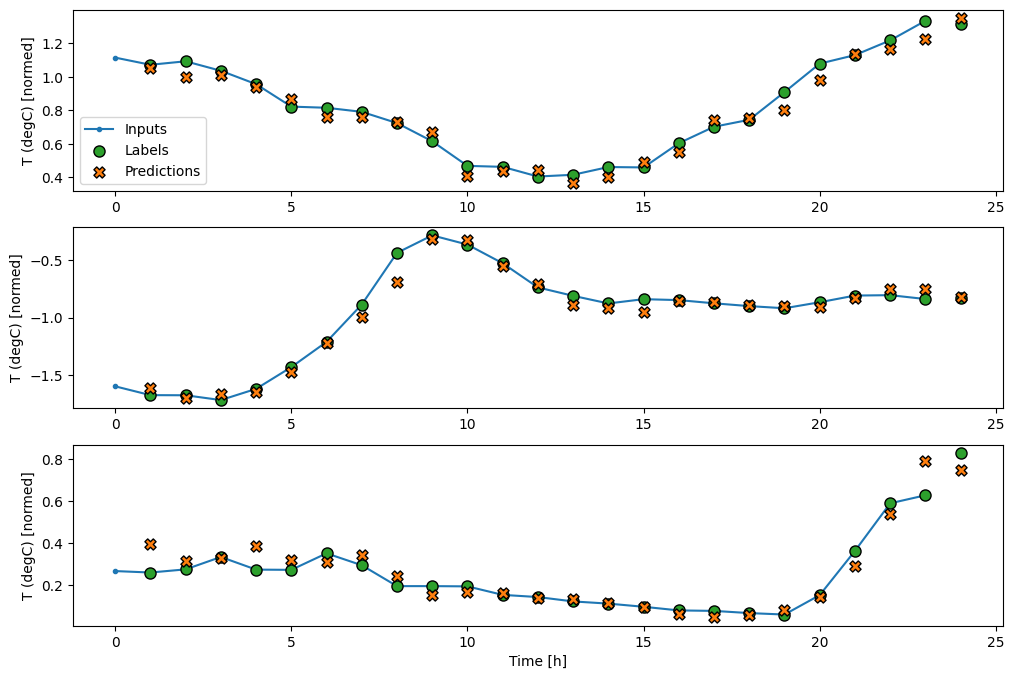
次は、wide_widow に対するサンプル予測の図です。多くの場合、入力気温のみを返すよりも予測が明らかに優れているのがわかりますが、いくつかのケースでは悪化しています。
wide_window.plot(linear)
線形モデルには、比較的解釈しやすいというメリットがあります。レイヤーの重みを引き出して、各入力に割り当てられた重みを確認することができます。
plt.bar(x = range(len(train_df.columns)),
height=linear.layers[0].kernel[:,0].numpy())
axis = plt.gca()
axis.set_xticks(range(len(train_df.columns)))
_ = axis.set_xticklabels(train_df.columns, rotation=90)
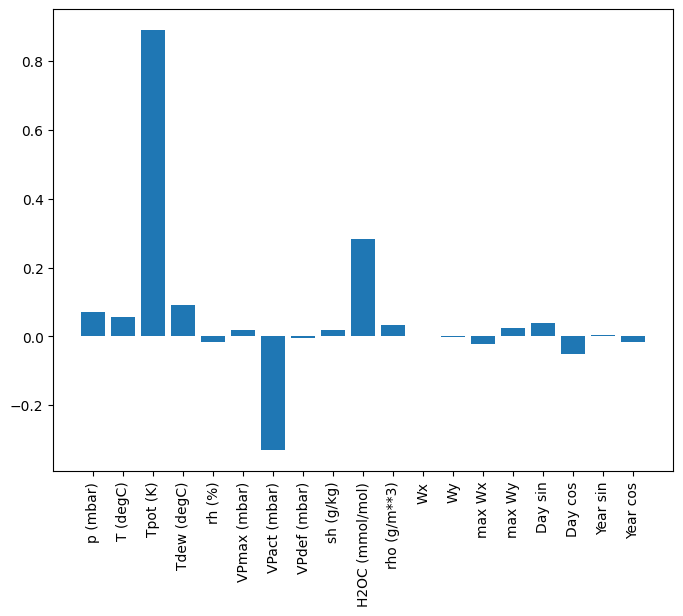
場合によっては、モデルには、入力 T (degC) のほとんどの重みを配置しないこともあります。これが、ランダム初期化のリスクの 1 つです。
Dense
複数の時間ステップで実際に動作するモデルを適用する前に、より深く強力な単一入力ステップモデルのパフォーマンスを確認しておく価値があります。
次は、linear モデルに似たモデルですが、入力と出力の間にいくつかの Dense レイヤーがスタックされています。
dense = tf.keras.Sequential([
tf.keras.layers.Dense(units=64, activation='relu'),
tf.keras.layers.Dense(units=64, activation='relu'),
tf.keras.layers.Dense(units=1)
])
history = compile_and_fit(dense, single_step_window)
val_performance['Dense'] = dense.evaluate(single_step_window.val)
performance['Dense'] = dense.evaluate(single_step_window.test, verbose=0)
Epoch 1/20 1534/1534 [==============================] - 7s 4ms/step - loss: 0.0148 - mean_absolute_error: 0.0793 - val_loss: 0.0087 - val_mean_absolute_error: 0.0685 Epoch 2/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0079 - mean_absolute_error: 0.0646 - val_loss: 0.0092 - val_mean_absolute_error: 0.0718 Epoch 3/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0076 - mean_absolute_error: 0.0628 - val_loss: 0.0071 - val_mean_absolute_error: 0.0604 Epoch 4/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0072 - mean_absolute_error: 0.0612 - val_loss: 0.0070 - val_mean_absolute_error: 0.0591 Epoch 5/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0071 - mean_absolute_error: 0.0602 - val_loss: 0.0066 - val_mean_absolute_error: 0.0570 Epoch 6/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0069 - mean_absolute_error: 0.0594 - val_loss: 0.0067 - val_mean_absolute_error: 0.0581 Epoch 7/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0068 - mean_absolute_error: 0.0585 - val_loss: 0.0067 - val_mean_absolute_error: 0.0569 439/439 [==============================] - 1s 2ms/step - loss: 0.0067 - mean_absolute_error: 0.0569
複数ステップの Dense
単一時間ステップモデルには、入力の現在の値に関するコンテキストがありません。そのため、時間の経過とともに、入力特徴量が変化する様子を確認できません。この問題を解決するために、モデルは予測を立てる際に複数の時間ステップにアクセスする必要があります。
baseline、linear、および dense モデルは、各時間ステップを個別に処理しました。ここでは、モデルは複数の時間ステップを入力として取り、単一の出力を生成します。
3 時間分の入力のバッチと、1 時間のラベルを生成する WindowGenerator を作成します。
Window の shift パラメータが 2 つのウィンドウの最後に相対的であるところに注意してください。
CONV_WIDTH = 3
conv_window = WindowGenerator(
input_width=CONV_WIDTH,
label_width=1,
shift=1,
label_columns=['T (degC)'])
conv_window
Total window size: 4 Input indices: [0 1 2] Label indices: [3] Label column name(s): ['T (degC)']
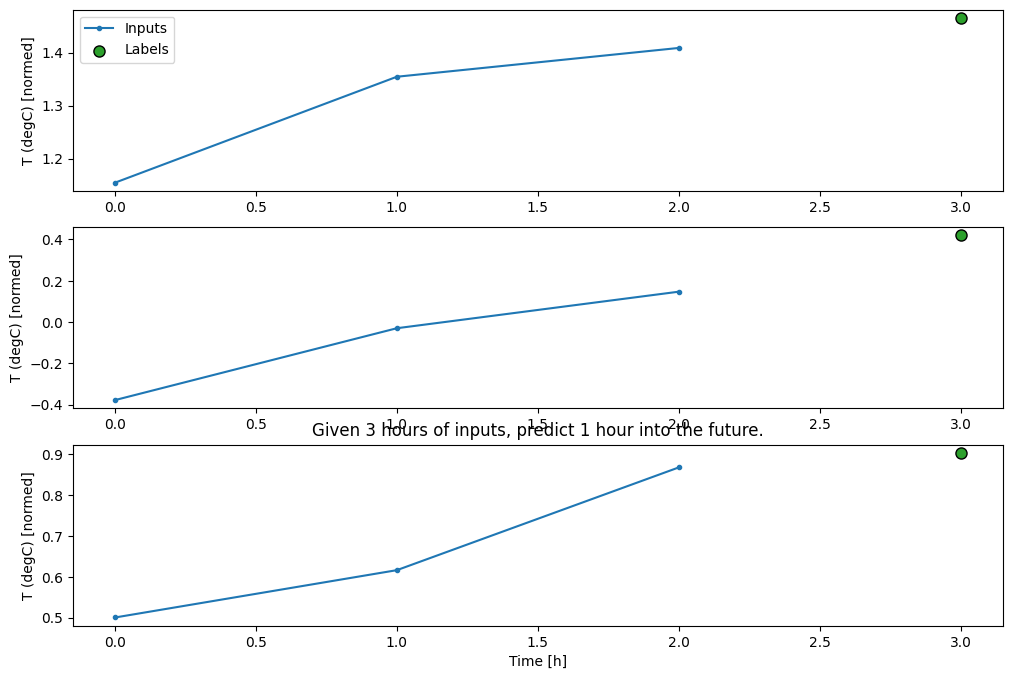
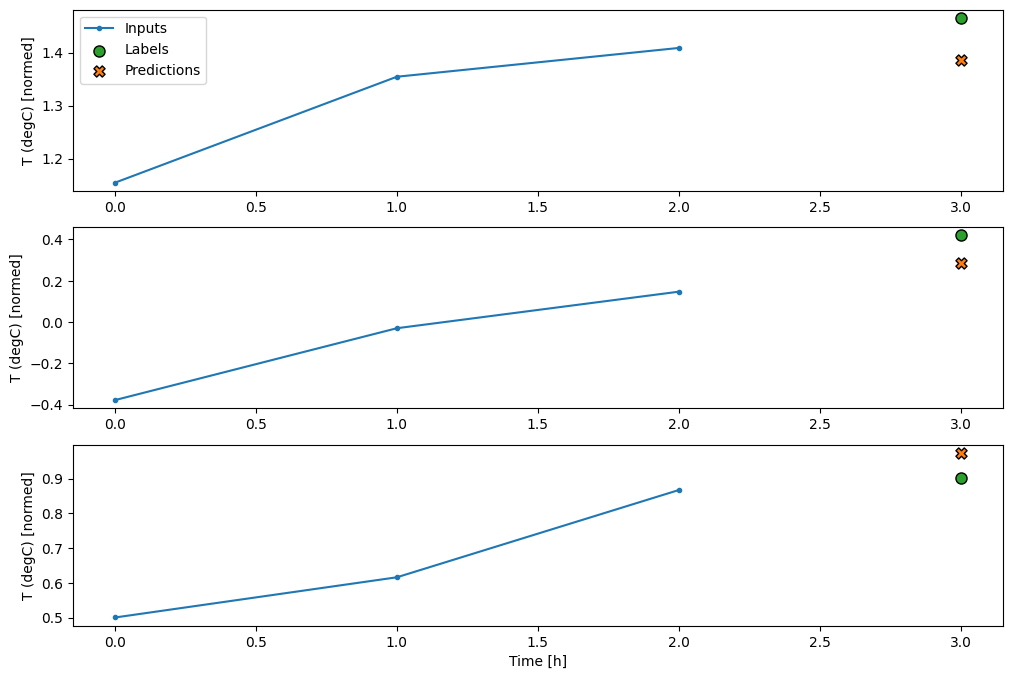
conv_window.plot()
plt.title("Given 3 hours of inputs, predict 1 hour into the future.")
Text(0.5, 1.0, 'Given 3 hours of inputs, predict 1 hour into the future.')
モデルの最初のレイヤーとして tf.keras.layers.Flatten を追加することで、複数入力ステップウィンドウで dense モデルをトレーニングすることができます。
multi_step_dense = tf.keras.Sequential([
# Shape: (time, features) => (time*features)
tf.keras.layers.Flatten(),
tf.keras.layers.Dense(units=32, activation='relu'),
tf.keras.layers.Dense(units=32, activation='relu'),
tf.keras.layers.Dense(units=1),
# Add back the time dimension.
# Shape: (outputs) => (1, outputs)
tf.keras.layers.Reshape([1, -1]),
])
print('Input shape:', conv_window.example[0].shape)
print('Output shape:', multi_step_dense(conv_window.example[0]).shape)
Input shape: (32, 3, 19) Output shape: (32, 1, 1)
history = compile_and_fit(multi_step_dense, conv_window)
IPython.display.clear_output()
val_performance['Multi step dense'] = multi_step_dense.evaluate(conv_window.val)
performance['Multi step dense'] = multi_step_dense.evaluate(conv_window.test, verbose=0)
438/438 [==============================] - 1s 2ms/step - loss: 0.0071 - mean_absolute_error: 0.0611
conv_window.plot(multi_step_dense)
このアプローチの主な欠点は、結果モデルを、まったくこの形状の入力ウィンドウでしか実行できないことです。
print('Input shape:', wide_window.example[0].shape)
try:
print('Output shape:', multi_step_dense(wide_window.example[0]).shape)
except Exception as e:
print(f'\n{type(e).__name__}:{e}')
Input shape: (32, 24, 19) ValueError:Exception encountered when calling layer 'sequential_2' (type Sequential). Input 0 of layer "dense_4" is incompatible with the layer: expected axis -1 of input shape to have value 57, but received input with shape (32, 456) Call arguments received by layer 'sequential_2' (type Sequential): • inputs=tf.Tensor(shape=(32, 24, 19), dtype=float32) • training=None • mask=None
この問題は、次のセクションの畳み込みモデルで解決することができます。
畳み込みニューラルネットワーク
畳み込みレイヤー(tf.keras.layers.Conv1D)も、複数の時間ステップを各予測への入力として取ります。
以下に示すのは、multi_step_dense と同じモデルを畳み込みで書き直したものです。
次の変更箇所に注意してください。
tf.keras.layers.Flattenと最初のtf.keras.layers.Denseはtf.keras.layers.Conv1Dに置き換えられています。- 畳み込みが出力に time 軸を維持するため、
tf.keras.layers.Reshapeは不要となっています。
conv_model = tf.keras.Sequential([
tf.keras.layers.Conv1D(filters=32,
kernel_size=(CONV_WIDTH,),
activation='relu'),
tf.keras.layers.Dense(units=32, activation='relu'),
tf.keras.layers.Dense(units=1),
])
これをサンプルバッチで実行し、モデルが期待される形状の出力を生成することを確認します。
print("Conv model on `conv_window`")
print('Input shape:', conv_window.example[0].shape)
print('Output shape:', conv_model(conv_window.example[0]).shape)
Conv model on `conv_window` Input shape: (32, 3, 19) Output shape: (32, 1, 1)
conv_window でトレーニングして評価すると、multi_step_dense モデルと似たようなパフォーマンスが得られます。
history = compile_and_fit(conv_model, conv_window)
IPython.display.clear_output()
val_performance['Conv'] = conv_model.evaluate(conv_window.val)
performance['Conv'] = conv_model.evaluate(conv_window.test, verbose=0)
438/438 [==============================] - 1s 2ms/step - loss: 0.0065 - mean_absolute_error: 0.0580
この conv_model と multi_step_dense モデルの違いは、conv_model はあらゆる長さの入力に対して実行できるところにあります。畳み込みレイヤーは入力のスライドウィンドウに適用されます。
より幅広い入力に対してこれを実行する場合、生成される出力も幅広くなります。
print("Wide window")
print('Input shape:', wide_window.example[0].shape)
print('Labels shape:', wide_window.example[1].shape)
print('Output shape:', conv_model(wide_window.example[0]).shape)
Wide window Input shape: (32, 24, 19) Labels shape: (32, 24, 1) Output shape: (32, 22, 1)
出力が入力よりも短いことに注意してください。トレーニングまたは描画がうまく機能するには、ラベルと、長さの同じ予測が必要です。そのため、いくつかの入力時間ステップを追加してワイドウィンドウを生成し、ラベルと予測の長さが一致するように、WindowGenerator を構築します。
LABEL_WIDTH = 24
INPUT_WIDTH = LABEL_WIDTH + (CONV_WIDTH - 1)
wide_conv_window = WindowGenerator(
input_width=INPUT_WIDTH,
label_width=LABEL_WIDTH,
shift=1,
label_columns=['T (degC)'])
wide_conv_window
Total window size: 27 Input indices: [ 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25] Label indices: [ 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26] Label column name(s): ['T (degC)']
print("Wide conv window")
print('Input shape:', wide_conv_window.example[0].shape)
print('Labels shape:', wide_conv_window.example[1].shape)
print('Output shape:', conv_model(wide_conv_window.example[0]).shape)
Wide conv window Input shape: (32, 26, 19) Labels shape: (32, 24, 1) Output shape: (32, 24, 1)
これで、幅広いウィンドウでモデルの予測を描画できるようになりました。最初の予測の前に、3 つの入力時間ステップがあることに注目してください。各予測は、前の 3 つの時間ステップに基づきます。
wide_conv_window.plot(conv_model)
回帰ニューラルネットワーク
回帰ニューラルネットワーク(RNN)は、時系列データに最適なニューラルネットワークの種類です。RNN は、ステップごとに時系列を処理し、時間ステップから時間ステップまでの内部状態を維持することができます。
RNN によるテキスト生成チュートリアルと Keras による回帰ニューラルネットワーク(RNN)ガイドでさらに学習することができます。
このチュートリアルでは、Long Short Term Memory(tf.keras.layers.LSTM)という RNN レイヤーを使用します。
tf.keras.layers.LSTM などのすべての Keras RNN レイヤーの重要なコンストラクタ引数は、return_sequences 引数です。この設定は、次の 2 つのいずれかの方法でレイヤーを構成することができます。
Falseである場合(デフォルト)、レイヤーは、最後の時間ステップの出力のみを返すため、単一の予測を立てる前に、内部状態をウォームアップする時間を得られます。
Trueである場合、レイヤーは、各入力に対する出力を返し、次の項目に役立てることができます。- RNN レイヤーをスタックする。
- 複数の時間ステップで同時にモデルをトレーニングする。
lstm_model = tf.keras.models.Sequential([
# Shape [batch, time, features] => [batch, time, lstm_units]
tf.keras.layers.LSTM(32, return_sequences=True),
# Shape => [batch, time, features]
tf.keras.layers.Dense(units=1)
])
return_sequences=True の場合、24 時間のデータで一度にモデルをトレーニングすることができます。
注意: モデルのパフォーマンスとしては悲観的な見解になります。最初の時間ステップは前のステップにアクセスできないため、上記に示した単純な linear モデルと dense モデルとあまり変わりません。
print('Input shape:', wide_window.example[0].shape)
print('Output shape:', lstm_model(wide_window.example[0]).shape)
Input shape: (32, 24, 19) Output shape: (32, 24, 1)
history = compile_and_fit(lstm_model, wide_window)
IPython.display.clear_output()
val_performance['LSTM'] = lstm_model.evaluate(wide_window.val)
performance['LSTM'] = lstm_model.evaluate(wide_window.test, verbose=0)
438/438 [==============================] - 1s 3ms/step - loss: 0.0056 - mean_absolute_error: 0.0518
wide_window.plot(lstm_model)
パフォーマンス
このデータセットでは、通常、各モデルは前のモデルよりわずかな改善が見られます。
x = np.arange(len(performance))
width = 0.3
metric_name = 'mean_absolute_error'
metric_index = lstm_model.metrics_names.index('mean_absolute_error')
val_mae = [v[metric_index] for v in val_performance.values()]
test_mae = [v[metric_index] for v in performance.values()]
plt.ylabel('mean_absolute_error [T (degC), normalized]')
plt.bar(x - 0.17, val_mae, width, label='Validation')
plt.bar(x + 0.17, test_mae, width, label='Test')
plt.xticks(ticks=x, labels=performance.keys(),
rotation=45)
_ = plt.legend()
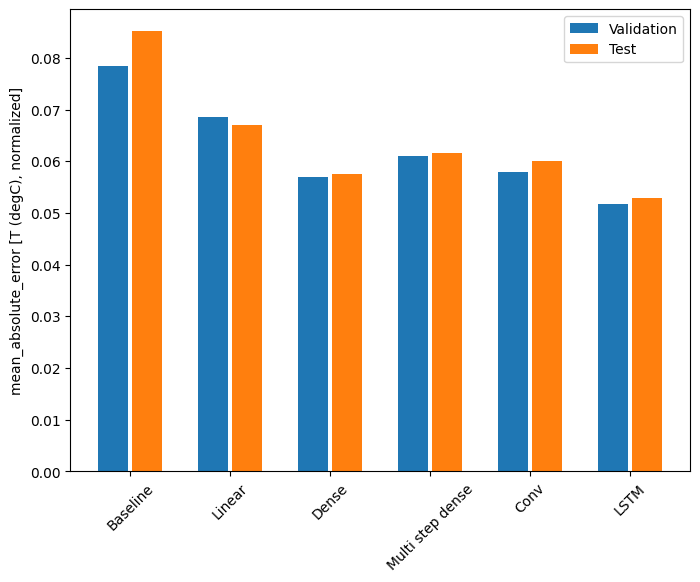
for name, value in performance.items():
print(f'{name:12s}: {value[1]:0.4f}')
Baseline : 0.0852 Linear : 0.0670 Dense : 0.0575 Multi step dense: 0.0616 Conv : 0.0601 LSTM : 0.0529
複数出力モデル
モデルはこれまで、単一時間ステップに対して単一出力特徴量 T (degC) をすべて予測しました。
これらのモデルはすべて、出力レイヤーのユニット数を変更し、labels(example_labels)のすべての特徴量を含めるようにトレーニングウィンドウを調整するだけで、複数の特徴量を予測するように変換することができます。
single_step_window = WindowGenerator(
# `WindowGenerator` returns all features as labels if you
# don't set the `label_columns` argument.
input_width=1, label_width=1, shift=1)
wide_window = WindowGenerator(
input_width=24, label_width=24, shift=1)
for example_inputs, example_labels in wide_window.train.take(1):
print(f'Inputs shape (batch, time, features): {example_inputs.shape}')
print(f'Labels shape (batch, time, features): {example_labels.shape}')
Inputs shape (batch, time, features): (32, 24, 19) Labels shape (batch, time, features): (32, 24, 19)
上記では、ラベルの features 軸に 1 ではなく、入力と同じ深度があることに注意してください。
基準
ここでは同じ基準モデル(Baseline)を使用できますが、今回は、特定の label_index を選択する代わりにすべての特徴量を繰り返します。
baseline = Baseline()
baseline.compile(loss=tf.keras.losses.MeanSquaredError(),
metrics=[tf.keras.metrics.MeanAbsoluteError()])
val_performance = {}
performance = {}
val_performance['Baseline'] = baseline.evaluate(wide_window.val)
performance['Baseline'] = baseline.evaluate(wide_window.test, verbose=0)
438/438 [==============================] - 1s 2ms/step - loss: 0.0886 - mean_absolute_error: 0.1589
Dense
dense = tf.keras.Sequential([
tf.keras.layers.Dense(units=64, activation='relu'),
tf.keras.layers.Dense(units=64, activation='relu'),
tf.keras.layers.Dense(units=num_features)
])
history = compile_and_fit(dense, single_step_window)
IPython.display.clear_output()
val_performance['Dense'] = dense.evaluate(single_step_window.val)
performance['Dense'] = dense.evaluate(single_step_window.test, verbose=0)
439/439 [==============================] - 1s 2ms/step - loss: 0.0692 - mean_absolute_error: 0.1344
RNN
%%time
wide_window = WindowGenerator(
input_width=24, label_width=24, shift=1)
lstm_model = tf.keras.models.Sequential([
# Shape [batch, time, features] => [batch, time, lstm_units]
tf.keras.layers.LSTM(32, return_sequences=True),
# Shape => [batch, time, features]
tf.keras.layers.Dense(units=num_features)
])
history = compile_and_fit(lstm_model, wide_window)
IPython.display.clear_output()
val_performance['LSTM'] = lstm_model.evaluate( wide_window.val)
performance['LSTM'] = lstm_model.evaluate( wide_window.test, verbose=0)
print()
438/438 [==============================] - 1s 3ms/step - loss: 0.0611 - mean_absolute_error: 0.1197 CPU times: user 5min 52s, sys: 1min 14s, total: 7min 7s Wall time: 2min 39s
高度: 残差接続
上述の Baseline モデルは、時間ステップ間でシーケンスが大幅に変化しない事実を利用しました。このチュートリアルでトレーニングされたモデルはこれまで、ランダムに初期化されてから、出力が前の時間ステップからわずかに変化することを学習する必要がありました。
初期化に注意を払うことで、この問題を回避することはできますが、これをモデル構造に構築する方がより単純です。
時系列の分析では、次の値を予測する代わりに、次の時間ステップで値がどのように変化するかを予測するモデルを構築するのが一般的です。同様に、ディープラーニングの「残差ネットワーク」または「ResNet」は、各レイヤーがモデルの累積結果に追加されるアーキテクチャを指しています。
これが、変化は小さいものだという理解を活用する方法です。
基本的に、これによってモデルは Baseline に一致するように初期化されます。このタスクでは、モデルの収束を高速化することができ、わずかにパフォーマンスが向上されます。
このアプローチは、このチュートリアルで触れたあらゆるモデルと併用することができます。
ここでは、LSTM モデルに適用されています。最初の予測変化が小さく、残差接続より上回らないように、tf.initializers.zeros が使用されているところに注意してください。zeros は最後のレイヤーにだけ使用されているため、ここでは勾配の対称性が壊される懸念はありません。
class ResidualWrapper(tf.keras.Model):
def __init__(self, model):
super().__init__()
self.model = model
def call(self, inputs, *args, **kwargs):
delta = self.model(inputs, *args, **kwargs)
# The prediction for each time step is the input
# from the previous time step plus the delta
# calculated by the model.
return inputs + delta
%%time
residual_lstm = ResidualWrapper(
tf.keras.Sequential([
tf.keras.layers.LSTM(32, return_sequences=True),
tf.keras.layers.Dense(
num_features,
# The predicted deltas should start small.
# Therefore, initialize the output layer with zeros.
kernel_initializer=tf.initializers.zeros())
]))
history = compile_and_fit(residual_lstm, wide_window)
IPython.display.clear_output()
val_performance['Residual LSTM'] = residual_lstm.evaluate(wide_window.val)
performance['Residual LSTM'] = residual_lstm.evaluate(wide_window.test, verbose=0)
print()
438/438 [==============================] - 1s 3ms/step - loss: 0.0621 - mean_absolute_error: 0.1177 CPU times: user 1min 34s, sys: 19.1 s, total: 1min 53s Wall time: 43.4 s
パフォーマンス
これらの複数出力モデルの全体的なパフォーマンスは、次のようになります。
x = np.arange(len(performance))
width = 0.3
metric_name = 'mean_absolute_error'
metric_index = lstm_model.metrics_names.index('mean_absolute_error')
val_mae = [v[metric_index] for v in val_performance.values()]
test_mae = [v[metric_index] for v in performance.values()]
plt.bar(x - 0.17, val_mae, width, label='Validation')
plt.bar(x + 0.17, test_mae, width, label='Test')
plt.xticks(ticks=x, labels=performance.keys(),
rotation=45)
plt.ylabel('MAE (average over all outputs)')
_ = plt.legend()
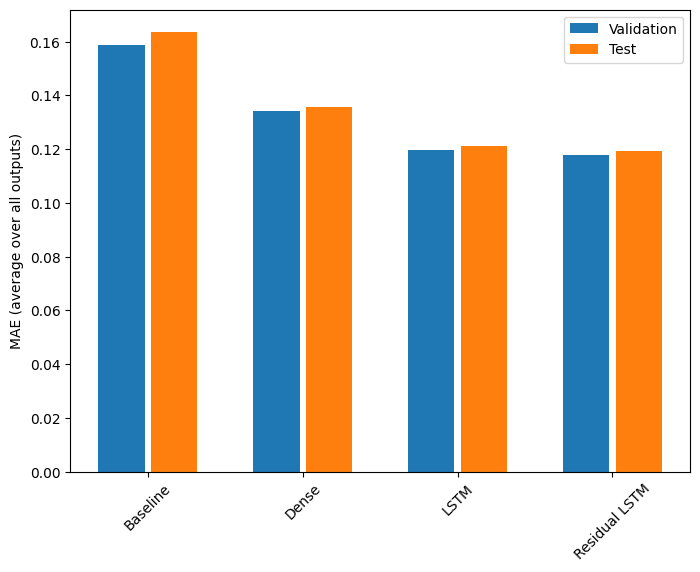
for name, value in performance.items():
print(f'{name:15s}: {value[1]:0.4f}')
Baseline : 0.1638 Dense : 0.1356 LSTM : 0.1210 Residual LSTM : 0.1192
上記のパフォーマンスは、すべてのモデル出力の平均です。
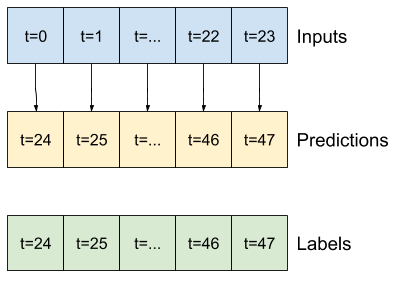
複数ステップのモデル
前のセクションの単一出力と複数出力はともに、1 時間先までの単一時間ステップ予測を行いました。
このセクションでは、これらのモデルを拡張し、複数時間ステップ予測を行います。
複数ステップ予測では、モデルは将来の値の範囲を予測できるように学習する必要があります。したがって、1 つの未来点を予測するだけの単一ステップモデルとは異なり、複数ステップモデルは、一連の未来の値を予測します。
これには大まかなアプローチが 2 つあります。
- 時系列全体を一度に予測するシングルショット予測
- モデルは単一ステップ予測を行い、その出力が入力としてフィードされる、自動回帰予測
このセクションでは、すべてのモデルは、全出力時間ステップのすべての特徴量を予測します。
複数ステップモデルでは、トレーニングデータは時間ごとのサンプルで構成されますが、ここでは、過去 24 時間のデータがある場合に、モデルは 24 時間先を予測するように学習します。
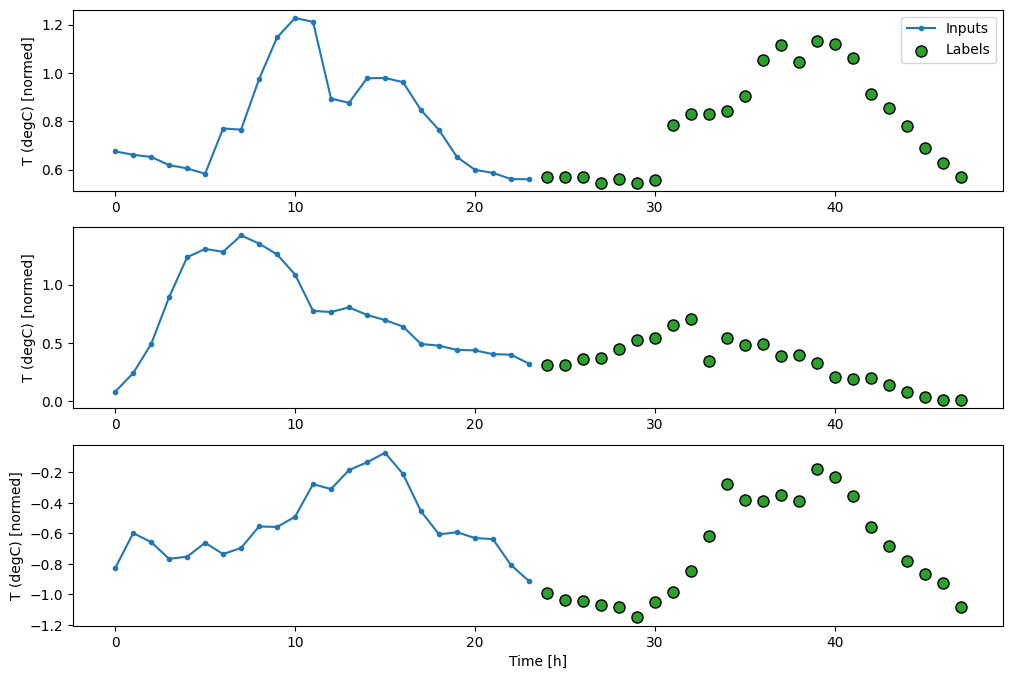
次は、データセットからこれらのスライスを生成する Window オブジェクトです。
OUT_STEPS = 24
multi_window = WindowGenerator(input_width=24,
label_width=OUT_STEPS,
shift=OUT_STEPS)
multi_window.plot()
multi_window
Total window size: 48 Input indices: [ 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23] Label indices: [24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47] Label column name(s): None
基準
このタスクの単純な基準は、最後の入力時間ステップを必要な出力時間ステップ数、繰り返すことです。
class MultiStepLastBaseline(tf.keras.Model):
def call(self, inputs):
return tf.tile(inputs[:, -1:, :], [1, OUT_STEPS, 1])
last_baseline = MultiStepLastBaseline()
last_baseline.compile(loss=tf.keras.losses.MeanSquaredError(),
metrics=[tf.keras.metrics.MeanAbsoluteError()])
multi_val_performance = {}
multi_performance = {}
multi_val_performance['Last'] = last_baseline.evaluate(multi_window.val)
multi_performance['Last'] = last_baseline.evaluate(multi_window.test, verbose=0)
multi_window.plot(last_baseline)
437/437 [==============================] - 1s 2ms/step - loss: 0.6285 - mean_absolute_error: 0.5007
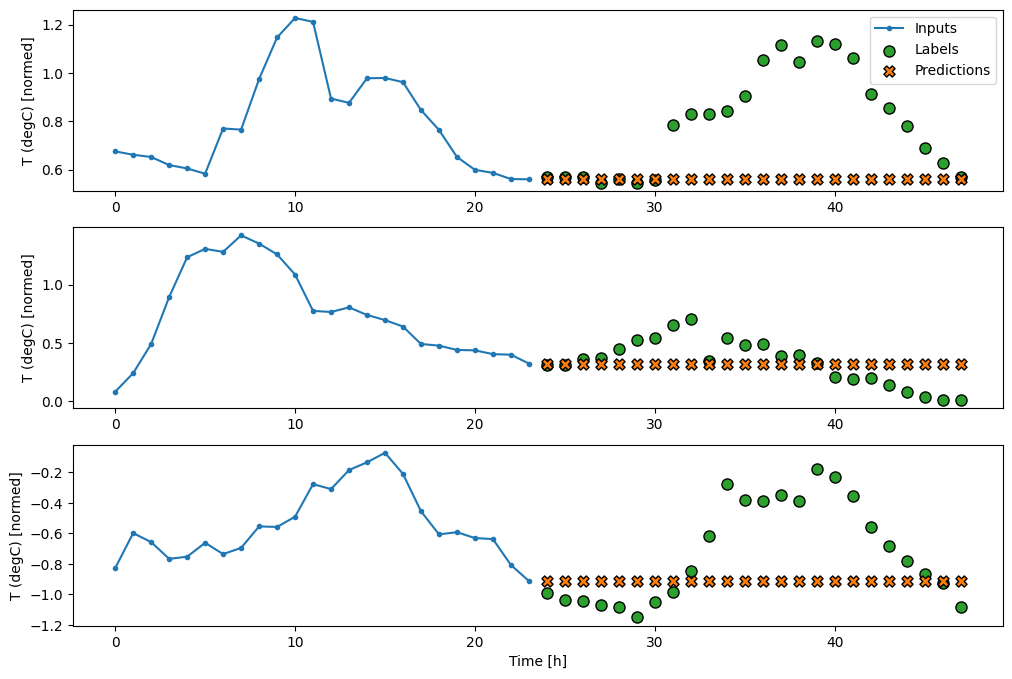
このタスクは、24 時間の履歴がある場合に 24 時間を予測するため、もう 1 つの単純なアプローチとして、翌日が同様であることを仮定し、前日を繰り返すことができます。
class RepeatBaseline(tf.keras.Model):
def call(self, inputs):
return inputs
repeat_baseline = RepeatBaseline()
repeat_baseline.compile(loss=tf.keras.losses.MeanSquaredError(),
metrics=[tf.keras.metrics.MeanAbsoluteError()])
multi_val_performance['Repeat'] = repeat_baseline.evaluate(multi_window.val)
multi_performance['Repeat'] = repeat_baseline.evaluate(multi_window.test, verbose=0)
multi_window.plot(repeat_baseline)
437/437 [==============================] - 1s 2ms/step - loss: 0.4270 - mean_absolute_error: 0.3959
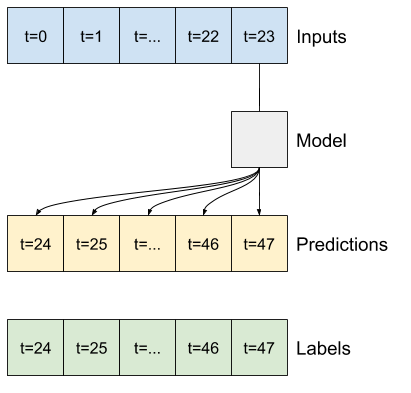
シングルショットモデル
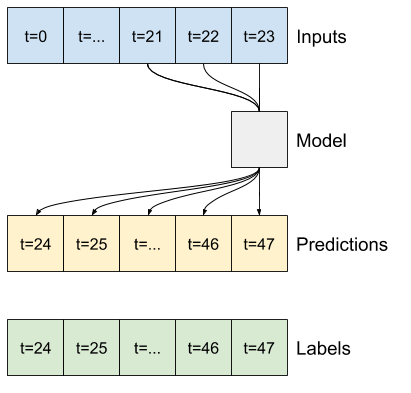
この問題の高レベルなアプローチには、モデルがシーケンス全体の予測を単一のステップで行う「シングルショット」モデルがあります。
これは、OUT_STEPS*features 出力ユニットを使って tf.keras.layers.Dense として効率的に実装できます。このモデルには、出力の形状を必要な (OUTPUT_STEPS, features) に設定し直すことだけが必要です。
線形
最後の時間ステップに基づく単純な線形モデルは、いずれの基準よりも優れていますが、パワーに劣ります。モデルは、線形投影の単一入力時間ステップから、OUTPUT_STEPS 時間ステップを予測する必要があります。おそらく主に時間帯と時期に基づいて、低次元スライスの行動のみをキャプチャできます。
multi_linear_model = tf.keras.Sequential([
# Take the last time-step.
# Shape [batch, time, features] => [batch, 1, features]
tf.keras.layers.Lambda(lambda x: x[:, -1:, :]),
# Shape => [batch, 1, out_steps*features]
tf.keras.layers.Dense(OUT_STEPS*num_features,
kernel_initializer=tf.initializers.zeros()),
# Shape => [batch, out_steps, features]
tf.keras.layers.Reshape([OUT_STEPS, num_features])
])
history = compile_and_fit(multi_linear_model, multi_window)
IPython.display.clear_output()
multi_val_performance['Linear'] = multi_linear_model.evaluate(multi_window.val)
multi_performance['Linear'] = multi_linear_model.evaluate(multi_window.test, verbose=0)
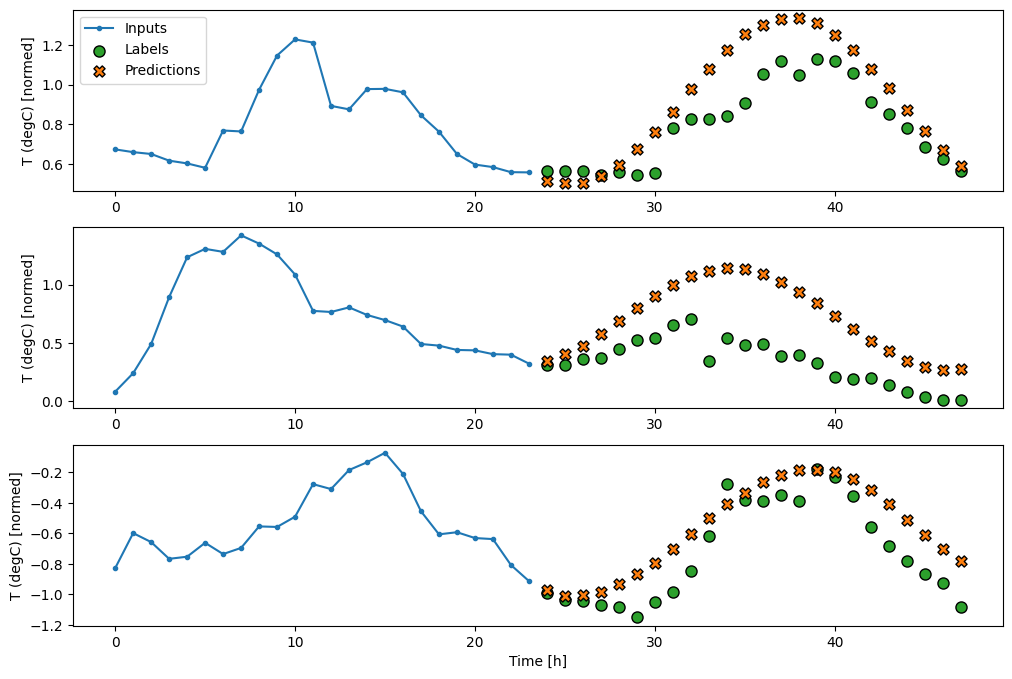
multi_window.plot(multi_linear_model)
437/437 [==============================] - 1s 2ms/step - loss: 0.2559 - mean_absolute_error: 0.3048
Dense
入力と出力の間に tf.keras.layers.Dense を追加すると、線形モデルにパワーが追加されますが、依然として、単一入力時間ステップのみに基づいたままとなります。
multi_dense_model = tf.keras.Sequential([
# Take the last time step.
# Shape [batch, time, features] => [batch, 1, features]
tf.keras.layers.Lambda(lambda x: x[:, -1:, :]),
# Shape => [batch, 1, dense_units]
tf.keras.layers.Dense(512, activation='relu'),
# Shape => [batch, out_steps*features]
tf.keras.layers.Dense(OUT_STEPS*num_features,
kernel_initializer=tf.initializers.zeros()),
# Shape => [batch, out_steps, features]
tf.keras.layers.Reshape([OUT_STEPS, num_features])
])
history = compile_and_fit(multi_dense_model, multi_window)
IPython.display.clear_output()
multi_val_performance['Dense'] = multi_dense_model.evaluate(multi_window.val)
multi_performance['Dense'] = multi_dense_model.evaluate(multi_window.test, verbose=0)
multi_window.plot(multi_dense_model)
437/437 [==============================] - 1s 2ms/step - loss: 0.2201 - mean_absolute_error: 0.2824
CNN
畳み込みモデルは、固定幅の履歴に基づく予測を行います。このため、時間の経過とともに変化する様子を確認できるため、密なモデルよりも優れたパフォーマンスが得られる可能性があります。
CONV_WIDTH = 3
multi_conv_model = tf.keras.Sequential([
# Shape [batch, time, features] => [batch, CONV_WIDTH, features]
tf.keras.layers.Lambda(lambda x: x[:, -CONV_WIDTH:, :]),
# Shape => [batch, 1, conv_units]
tf.keras.layers.Conv1D(256, activation='relu', kernel_size=(CONV_WIDTH)),
# Shape => [batch, 1, out_steps*features]
tf.keras.layers.Dense(OUT_STEPS*num_features,
kernel_initializer=tf.initializers.zeros()),
# Shape => [batch, out_steps, features]
tf.keras.layers.Reshape([OUT_STEPS, num_features])
])
history = compile_and_fit(multi_conv_model, multi_window)
IPython.display.clear_output()
multi_val_performance['Conv'] = multi_conv_model.evaluate(multi_window.val)
multi_performance['Conv'] = multi_conv_model.evaluate(multi_window.test, verbose=0)
multi_window.plot(multi_conv_model)
437/437 [==============================] - 1s 2ms/step - loss: 0.2160 - mean_absolute_error: 0.2820
RNN
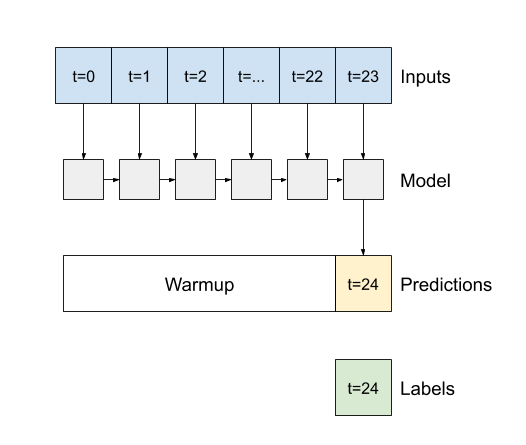
回帰モデルは、入力の長い履歴がモデルが行おうとしている予測に関連している場合に、それを使用して学習できます。ここでは、内部状態を 24 時間累積した上で、次の 24 時間の単一の予測が行われます。
このシングルショット形式では、LSTM は、最後の時間ステップの出力のみを生成する必要があるため、tf.keras.layers.LSTM で return_sequences=False に設定します。
multi_lstm_model = tf.keras.Sequential([
# Shape [batch, time, features] => [batch, lstm_units].
# Adding more `lstm_units` just overfits more quickly.
tf.keras.layers.LSTM(32, return_sequences=False),
# Shape => [batch, out_steps*features].
tf.keras.layers.Dense(OUT_STEPS*num_features,
kernel_initializer=tf.initializers.zeros()),
# Shape => [batch, out_steps, features].
tf.keras.layers.Reshape([OUT_STEPS, num_features])
])
history = compile_and_fit(multi_lstm_model, multi_window)
IPython.display.clear_output()
multi_val_performance['LSTM'] = multi_lstm_model.evaluate(multi_window.val)
multi_performance['LSTM'] = multi_lstm_model.evaluate(multi_window.test, verbose=0)
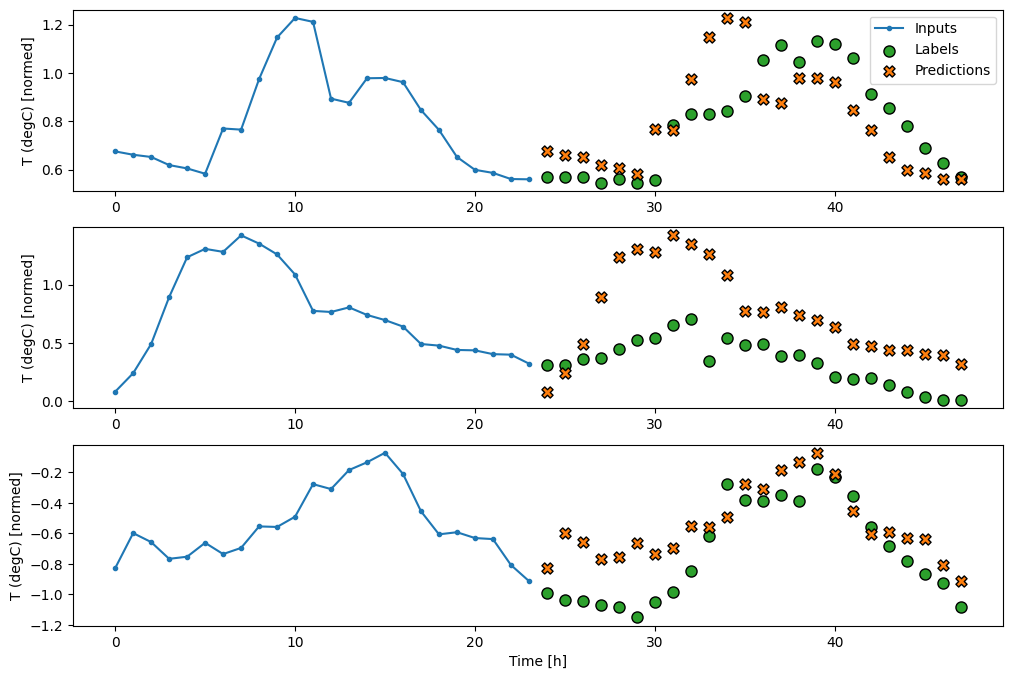
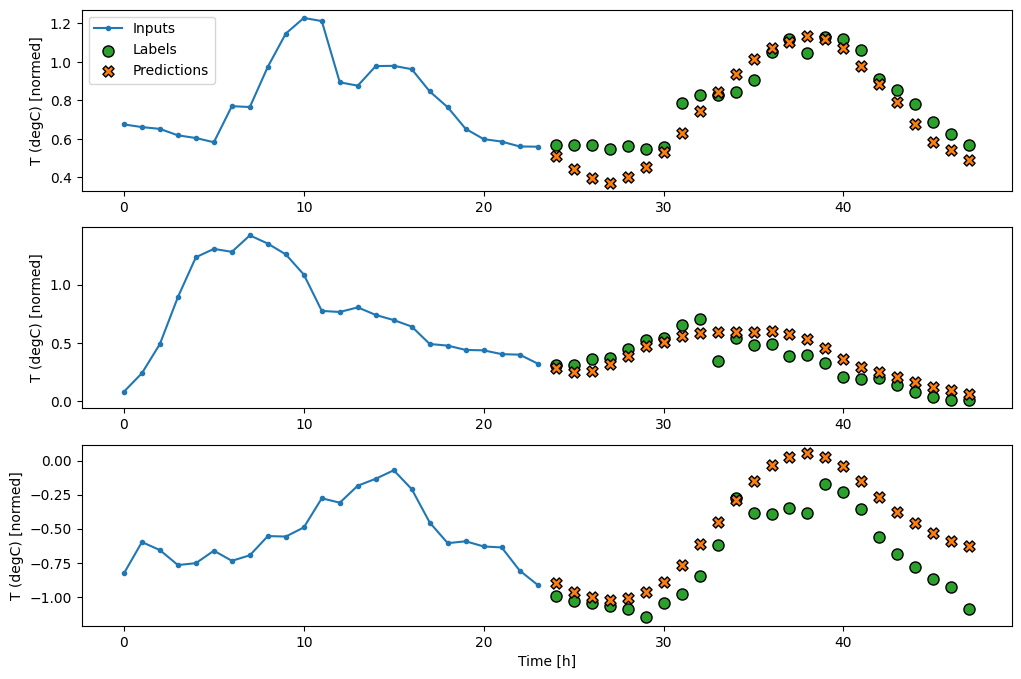
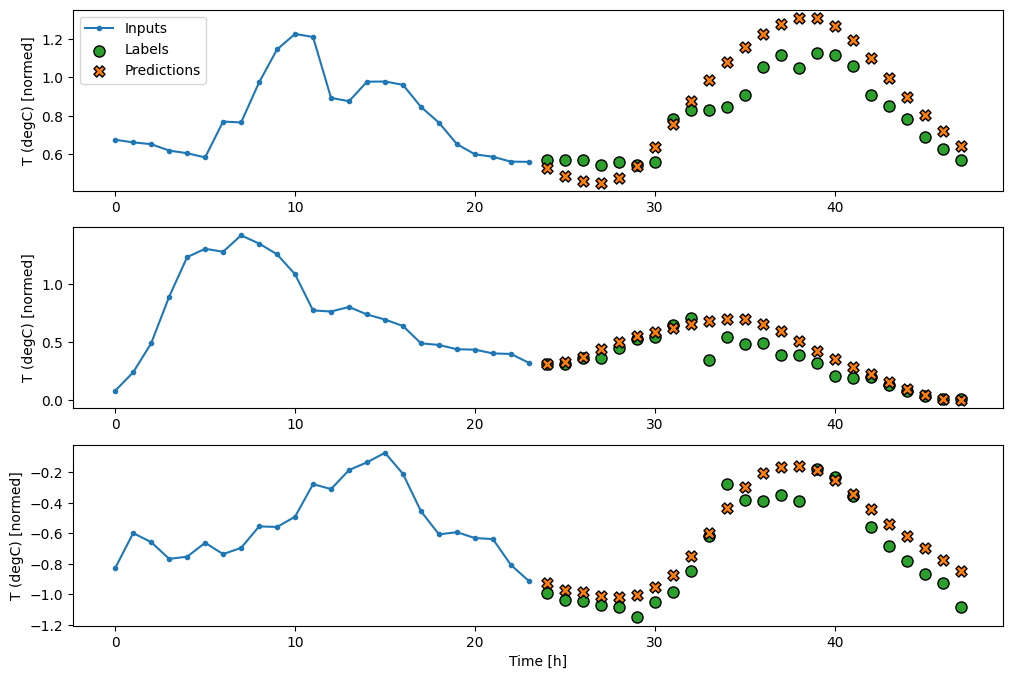
multi_window.plot(multi_lstm_model)
437/437 [==============================] - 1s 3ms/step - loss: 0.2139 - mean_absolute_error: 0.2842
高度: 自動回帰モデル
上記のモデルはすべて、単一のステップで、出力シーケンス全体を予測します。
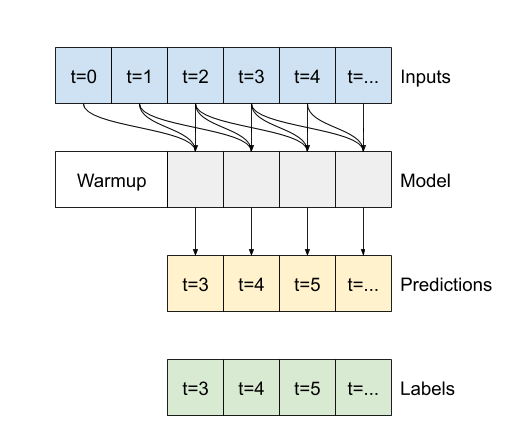
一部のケースでは、モデルがこの予測を個別の時間ステップに分解することが役立つ可能性があります。その上で、各モデルの出力を各ステップでそれ自体にフィードし、従来の「Generating Sequences With Recurrent Neural Networks」のように、前の予測で条件づけられた予測を立てることができます。
このスタイルのモデルには、長さの異なる出力を生成するようにセットアップできるという明確なメリットがあります。
このチュートリアルの前半でトレーニングされた単一ステップ複数出力モデルを使って、自動回帰フィードバックループで実行することもできますが、ここでは、それを行うように明示的にトレーニングされたモデルを構築することに焦点を当てることにします。
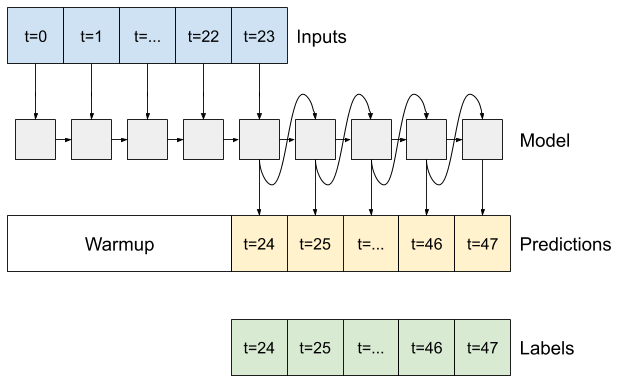
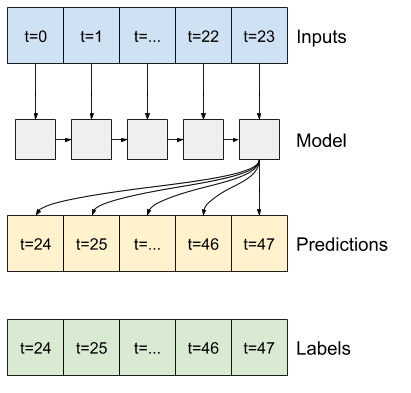
RNN
このチュートリアルでは自動回帰 RNN モデルのみを構築しますが、このパターンは、単一時間ステップを出力するために設計されたモデルに適用することができます。
モデルには、前の単一ステップの LSTM モデルと同じ基本形式があります。LSTM レイヤーの出力をモデルの予測に変換する、tf.keras.layers.Dense が続く tf.keras.layers.LSTM レイヤーです。
tf.keras.layers.LSTM は、状態とシーケンス結果を管理するより高位の tf.keras.layers.RNN にラッピングされた tf.keras.layers.LSTMCell です(詳細は、Keras による回帰ニューラルネットワーク(RNN)ガイドをご覧ください。
この場合、モデルは、より低レベルの単一時間ステップインターフェースに直接 tf.keras.layers.LSTMCell を使用するように、各ステップの入力を手動で管理する必要があります。
class FeedBack(tf.keras.Model):
def __init__(self, units, out_steps):
super().__init__()
self.out_steps = out_steps
self.units = units
self.lstm_cell = tf.keras.layers.LSTMCell(units)
# Also wrap the LSTMCell in an RNN to simplify the `warmup` method.
self.lstm_rnn = tf.keras.layers.RNN(self.lstm_cell, return_state=True)
self.dense = tf.keras.layers.Dense(num_features)
feedback_model = FeedBack(units=32, out_steps=OUT_STEPS)
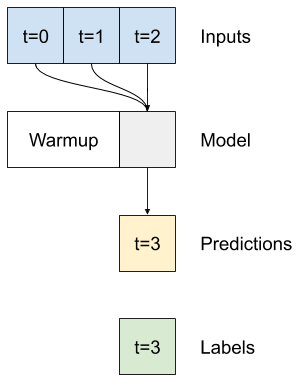
このモデルが必要とする最初のメソッドは、入力に応じて内部状態を初期化する warmup メソッドです。トレーニングされると、この状態は入力履歴の関連する部分をキャプチャするようになります。これは、上記の単一ステップ LSTM モデルと同等です。
def warmup(self, inputs):
# inputs.shape => (batch, time, features)
# x.shape => (batch, lstm_units)
x, *state = self.lstm_rnn(inputs)
# predictions.shape => (batch, features)
prediction = self.dense(x)
return prediction, state
FeedBack.warmup = warmup
このメソッドは、単一の時間ステップ予測と LSTM の内部状態を返します。
prediction, state = feedback_model.warmup(multi_window.example[0])
prediction.shape
TensorShape([32, 19])
RNN の状態と初期の予測によって、各ステップの予測を入力としてフィードし直すモデルのイテレーションを続行できるようになりました。
出力予測を収集する最も単純なアプローチは、Python リストと、ループ後に tf.stack を使用する方法です。
注意: このような Python リストのスタックは、Eager execution、トレーニングの Model.compile(..., run_eagerly=True) の使用、または固定長出力によってのみ機能します。動的出力長については、Python リストの代わりに tf.TensorArray、Python range の代わりに tf.range を使用する必要があります。
def call(self, inputs, training=None):
# Use a TensorArray to capture dynamically unrolled outputs.
predictions = []
# Initialize the LSTM state.
prediction, state = self.warmup(inputs)
# Insert the first prediction.
predictions.append(prediction)
# Run the rest of the prediction steps.
for n in range(1, self.out_steps):
# Use the last prediction as input.
x = prediction
# Execute one lstm step.
x, state = self.lstm_cell(x, states=state,
training=training)
# Convert the lstm output to a prediction.
prediction = self.dense(x)
# Add the prediction to the output.
predictions.append(prediction)
# predictions.shape => (time, batch, features)
predictions = tf.stack(predictions)
# predictions.shape => (batch, time, features)
predictions = tf.transpose(predictions, [1, 0, 2])
return predictions
FeedBack.call = call
サンプル入力にこのモデルをテスト実行します。
print('Output shape (batch, time, features): ', feedback_model(multi_window.example[0]).shape)
Output shape (batch, time, features): (32, 24, 19)
次に、モデルをトレーニングします。
history = compile_and_fit(feedback_model, multi_window)
IPython.display.clear_output()
multi_val_performance['AR LSTM'] = feedback_model.evaluate(multi_window.val)
multi_performance['AR LSTM'] = feedback_model.evaluate(multi_window.test, verbose=0)
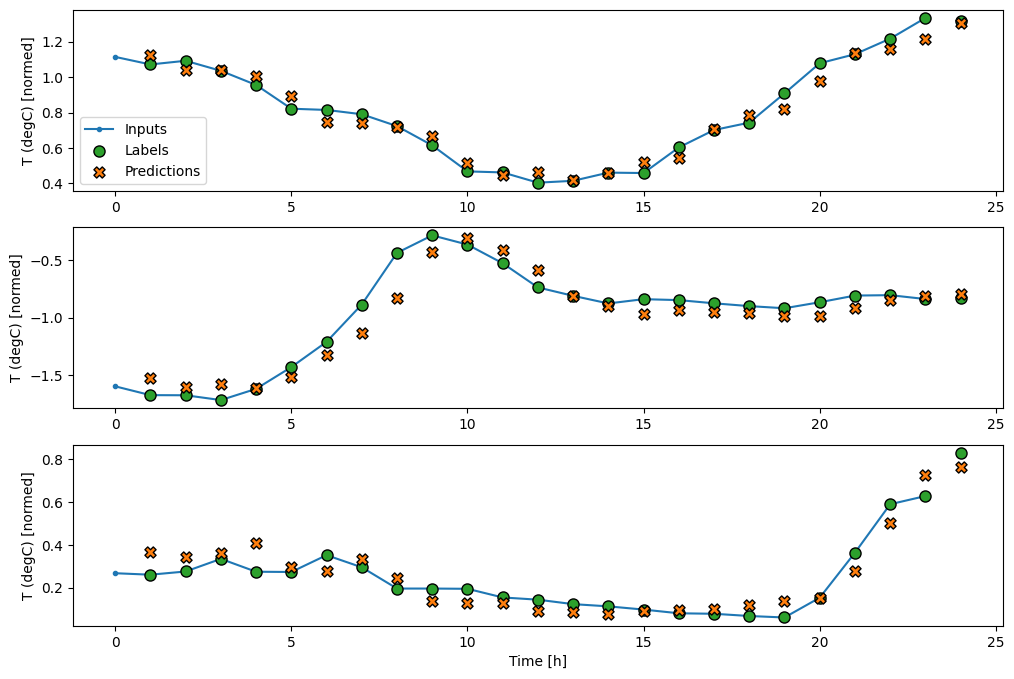
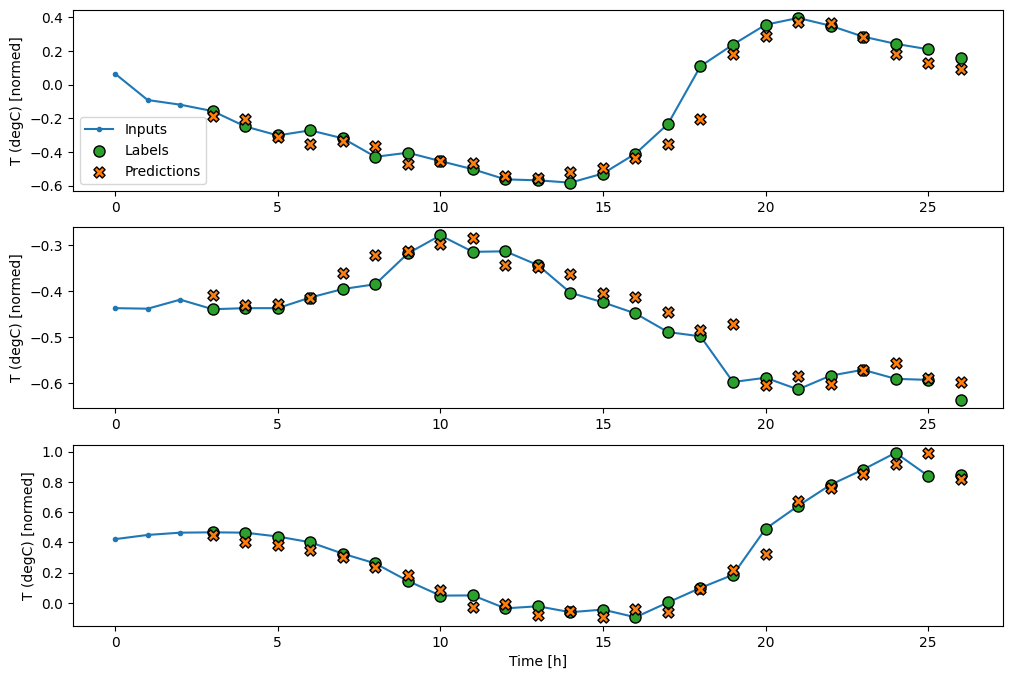
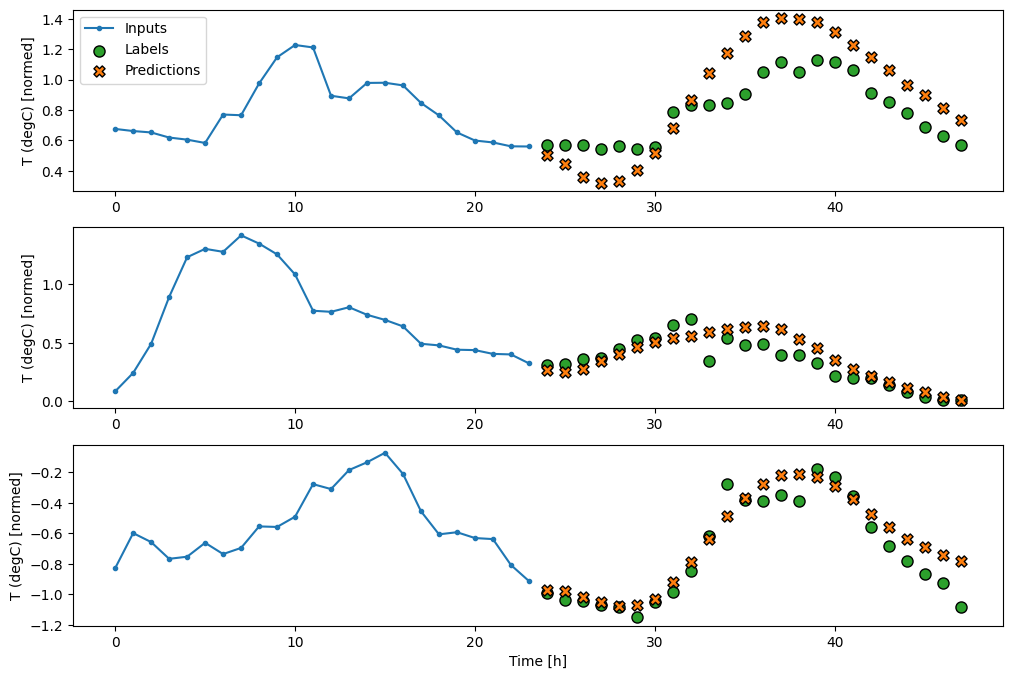
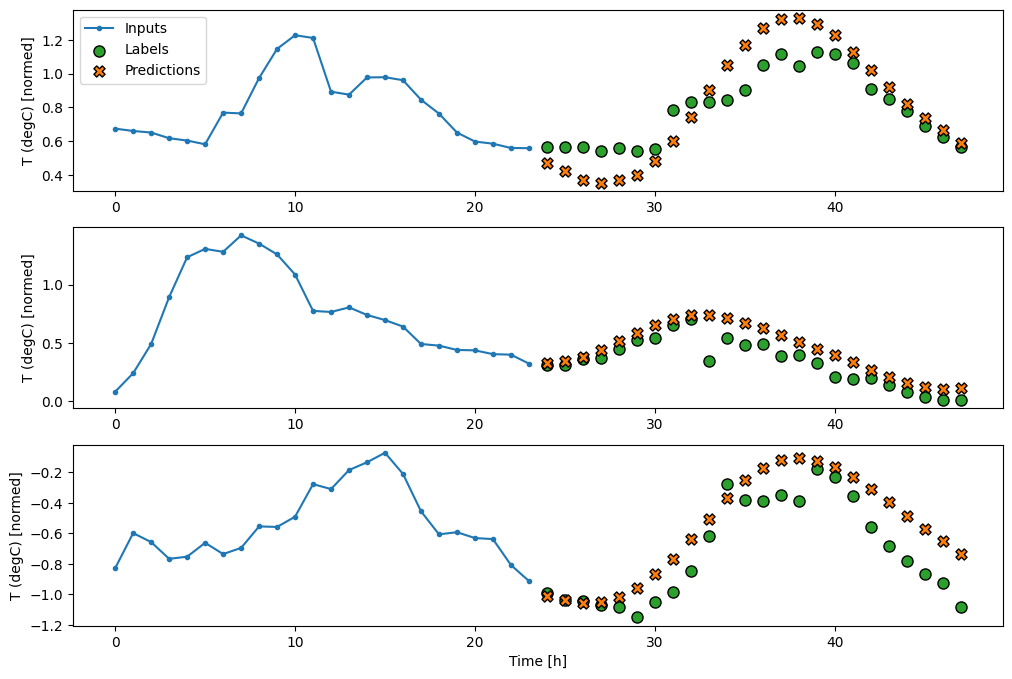
multi_window.plot(feedback_model)
437/437 [==============================] - 3s 8ms/step - loss: 0.2224 - mean_absolute_error: 0.2994
パフォーマンス
この問題では、モデルの複雑さの関数として、戻り値が明確に小さくなっています。
x = np.arange(len(multi_performance))
width = 0.3
metric_name = 'mean_absolute_error'
metric_index = lstm_model.metrics_names.index('mean_absolute_error')
val_mae = [v[metric_index] for v in multi_val_performance.values()]
test_mae = [v[metric_index] for v in multi_performance.values()]
plt.bar(x - 0.17, val_mae, width, label='Validation')
plt.bar(x + 0.17, test_mae, width, label='Test')
plt.xticks(ticks=x, labels=multi_performance.keys(),
rotation=45)
plt.ylabel(f'MAE (average over all times and outputs)')
_ = plt.legend()
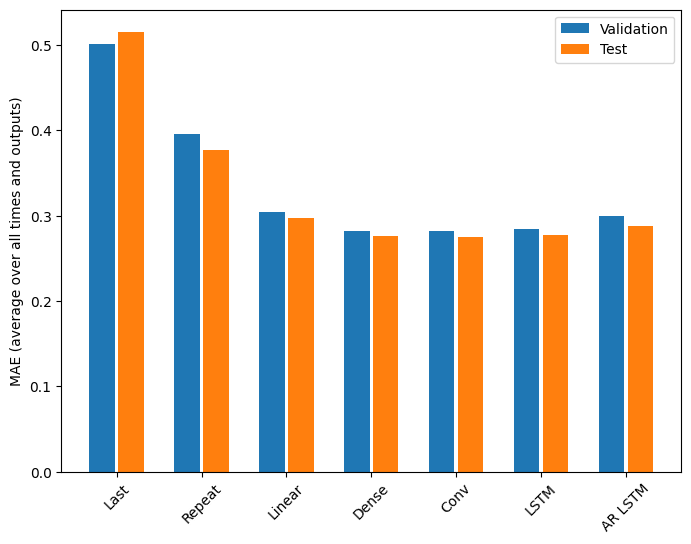
このチュートリアルの前半で説明した複数出力モデルのメトリックから、すべての出力特徴量全体で平均化されていることがわかります。これらのパフォーマンスは似ていますが、出力時間ステップ間でも平均化されています。
for name, value in multi_performance.items():
print(f'{name:8s}: {value[1]:0.4f}')
Last : 0.5157 Repeat : 0.3774 Linear : 0.2978 Dense : 0.2765 Conv : 0.2752 LSTM : 0.2775 AR LSTM : 0.2884
密なモデルから畳み込みと回帰モデルに移行したことで得られたのは、あったとしてもわずか数パーセント程度で、自動回帰モデルのパフォーマンスは明らかに低いものでした。そのため、こういったより複雑なアプローチはこの問題に使用するほどの価値はありませんでしたが、試さなければ、このような結果も知るすべはありません。これらのモデルは、他の問題には役立つものかもしれません。
次のステップ
このチュートリアルでは、TensorFlow を使った時系列予測を簡単に紹介しました。
さらに学習するには、以下をご覧ください。
- 「Hands-on Machine Learning with Scikit-Learn, Keras, and TensorFlow」(第 2 版)の第 15 章
- 「Deep Learning with Python」の第 6 章
- 「Udacity's intro to TensorFlow for deep learning」のレッスン 8、および実践ノートブック
また、TensorFlow では、古典的な時系列モデルを実装することもできます。このチュートリアルは、TensorFlow の組み込み機能に焦点が当てられています。