
| | |  Voir la source sur GitHub Voir la source sur GitHub | |
Ce bloc-notes montre comment former un autoencodeur variationnel (VAE) ( 1 , 2 ) sur l'ensemble de données MNIST. Un VAE est une version probabiliste de l'auto-encodeur, un modèle qui prend des données d'entrée de grande dimension et les comprime en une représentation plus petite. Contrairement à un auto-encodeur traditionnel, qui mappe l'entrée sur un vecteur latent, un VAE mappe les données d'entrée dans les paramètres d'une distribution de probabilité, tels que la moyenne et la variance d'une gaussienne. Cette approche produit un espace latent continu et structuré, utile pour la génération d'images.
Installer
pip install tensorflow-probability# to generate gifspip install imageiopip install git+https://github.com/tensorflow/docs
from IPython import display
import glob
import imageio
import matplotlib.pyplot as plt
import numpy as np
import PIL
import tensorflow as tf
import tensorflow_probability as tfp
import time
Charger le jeu de données MNIST
Chaque image MNIST est à l'origine un vecteur de 784 nombres entiers, dont chacun est compris entre 0 et 255 et représente l'intensité d'un pixel. Modélisez chaque pixel avec une distribution de Bernoulli dans notre modèle et binarisez statiquement l'ensemble de données.
(train_images, _), (test_images, _) = tf.keras.datasets.mnist.load_data()
Downloading data from https://storage.googleapis.com/tensorflow/tf-keras-datasets/mnist.npz 11493376/11490434 [==============================] - 0s 0us/step 11501568/11490434 [==============================] - 0s 0us/step
def preprocess_images(images):
images = images.reshape((images.shape[0], 28, 28, 1)) / 255.
return np.where(images > .5, 1.0, 0.0).astype('float32')
train_images = preprocess_images(train_images)
test_images = preprocess_images(test_images)
train_size = 60000
batch_size = 32
test_size = 10000
Utilisez tf.data pour regrouper et mélanger les données
train_dataset = (tf.data.Dataset.from_tensor_slices(train_images)
.shuffle(train_size).batch(batch_size))
test_dataset = (tf.data.Dataset.from_tensor_slices(test_images)
.shuffle(test_size).batch(batch_size))
Définissez les réseaux d'encodeur et de décodeur avec tf.keras.Sequential
Dans cet exemple de VAE, utilisez deux petits ConvNets pour les réseaux d'encodeur et de décodeur. Dans la littérature, ces réseaux sont également appelés respectivement modèles d'inférence/reconnaissance et modèles génératifs. Utilisez tf.keras.Sequential pour simplifier la mise en œuvre. Soit \(x\) et \(z\) respectivement l'observation et la variable latente dans les descriptions suivantes.
Réseau codeur
Cela définit la distribution postérieure approximative \(q(z|x)\), qui prend en entrée une observation et produit un ensemble de paramètres pour spécifier la distribution conditionnelle de la représentation latente \(z\). Dans cet exemple, modélisez simplement la distribution sous la forme d'une gaussienne diagonale, et le réseau génère les paramètres de moyenne et de log-variance d'une gaussienne factorisée. Sortie log-variance au lieu de la variance directement pour la stabilité numérique.
Réseau décodeur
Ceci définit la distribution conditionnelle de l'observation \(p(x|z)\), qui prend un échantillon latent \(z\) comme entrée et produit les paramètres pour une distribution conditionnelle de l'observation. Modélisez la distribution latente a priori \(p(z)\) comme une unité gaussienne.
Astuce de reparamétrage
Pour générer un échantillon \(z\) pour le décodeur pendant l'apprentissage, vous pouvez échantillonner à partir de la distribution latente définie par les paramètres émis par l'encodeur, étant donné une observation d'entrée \(x\). Cependant, cette opération d'échantillonnage crée un goulot d'étranglement car la rétropropagation ne peut pas passer par un nœud aléatoire.
Pour résoudre ce problème, utilisez une astuce de reparamétrisation. Dans notre exemple, vous approximez \(z\) en utilisant les paramètres du décodeur et un autre paramètre \(\epsilon\) comme suit :
\[z = \mu + \sigma \odot \epsilon\]
où \(\mu\) et \(\sigma\) représentent respectivement la moyenne et l'écart type d'une distribution gaussienne. Ils peuvent être dérivés de la sortie du décodeur. Le \(\epsilon\) peut être considéré comme un bruit aléatoire utilisé pour maintenir la stochasticité du \(z\). Générez \(\epsilon\) à partir d'une distribution normale standard.
La variable latente \(z\) est maintenant générée par une fonction de \(\mu\), \(\sigma\) et \(\epsilon\), ce qui permettrait au modèle de rétropropager les gradients dans l'encodeur via \(\mu\) et \(\sigma\) respectivement, tout en maintenant la stochasticité via \(\epsilon\).
Architecture de réseau
Pour le réseau de codeurs, utilisez deux couches convolutionnelles suivies d'une couche entièrement connectée. Dans le réseau de décodeurs, reproduisez cette architecture en utilisant une couche entièrement connectée suivie de trois couches de transposition de convolution (alias couches déconvolutives dans certains contextes). Notez qu'il est courant d'éviter d'utiliser la normalisation par lots lors de la formation des VAE, car la stochasticité supplémentaire due à l'utilisation de mini-lots peut aggraver l'instabilité en plus de la stochasticité de l'échantillonnage.
class CVAE(tf.keras.Model):
"""Convolutional variational autoencoder."""
def __init__(self, latent_dim):
super(CVAE, self).__init__()
self.latent_dim = latent_dim
self.encoder = tf.keras.Sequential(
[
tf.keras.layers.InputLayer(input_shape=(28, 28, 1)),
tf.keras.layers.Conv2D(
filters=32, kernel_size=3, strides=(2, 2), activation='relu'),
tf.keras.layers.Conv2D(
filters=64, kernel_size=3, strides=(2, 2), activation='relu'),
tf.keras.layers.Flatten(),
# No activation
tf.keras.layers.Dense(latent_dim + latent_dim),
]
)
self.decoder = tf.keras.Sequential(
[
tf.keras.layers.InputLayer(input_shape=(latent_dim,)),
tf.keras.layers.Dense(units=7*7*32, activation=tf.nn.relu),
tf.keras.layers.Reshape(target_shape=(7, 7, 32)),
tf.keras.layers.Conv2DTranspose(
filters=64, kernel_size=3, strides=2, padding='same',
activation='relu'),
tf.keras.layers.Conv2DTranspose(
filters=32, kernel_size=3, strides=2, padding='same',
activation='relu'),
# No activation
tf.keras.layers.Conv2DTranspose(
filters=1, kernel_size=3, strides=1, padding='same'),
]
)
@tf.function
def sample(self, eps=None):
if eps is None:
eps = tf.random.normal(shape=(100, self.latent_dim))
return self.decode(eps, apply_sigmoid=True)
def encode(self, x):
mean, logvar = tf.split(self.encoder(x), num_or_size_splits=2, axis=1)
return mean, logvar
def reparameterize(self, mean, logvar):
eps = tf.random.normal(shape=mean.shape)
return eps * tf.exp(logvar * .5) + mean
def decode(self, z, apply_sigmoid=False):
logits = self.decoder(z)
if apply_sigmoid:
probs = tf.sigmoid(logits)
return probs
return logits
Définir la fonction de perte et l'optimiseur
Les VAE s'entraînent en maximisant la borne inférieure de la preuve (ELBO) sur la log-vraisemblance marginale :
\[\log p(x) \ge \text{ELBO} = \mathbb{E}_{q(z|x)}\left[\log \frac{p(x, z)}{q(z|x)}\right].\]
En pratique, optimisez l'estimation de Monte Carlo à échantillon unique de cette espérance :
\[\log p(x| z) + \log p(z) - \log q(z|x),\]
où \(z\) est échantillonné à partir de \(q(z|x)\).
optimizer = tf.keras.optimizers.Adam(1e-4)
def log_normal_pdf(sample, mean, logvar, raxis=1):
log2pi = tf.math.log(2. * np.pi)
return tf.reduce_sum(
-.5 * ((sample - mean) ** 2. * tf.exp(-logvar) + logvar + log2pi),
axis=raxis)
def compute_loss(model, x):
mean, logvar = model.encode(x)
z = model.reparameterize(mean, logvar)
x_logit = model.decode(z)
cross_ent = tf.nn.sigmoid_cross_entropy_with_logits(logits=x_logit, labels=x)
logpx_z = -tf.reduce_sum(cross_ent, axis=[1, 2, 3])
logpz = log_normal_pdf(z, 0., 0.)
logqz_x = log_normal_pdf(z, mean, logvar)
return -tf.reduce_mean(logpx_z + logpz - logqz_x)
@tf.function
def train_step(model, x, optimizer):
"""Executes one training step and returns the loss.
This function computes the loss and gradients, and uses the latter to
update the model's parameters.
"""
with tf.GradientTape() as tape:
loss = compute_loss(model, x)
gradients = tape.gradient(loss, model.trainable_variables)
optimizer.apply_gradients(zip(gradients, model.trainable_variables))
Entraînement
- Commencez par itérer sur le jeu de données
- Au cours de chaque itération, passez l'image à l'encodeur pour obtenir un ensemble de paramètres de moyenne et de log-variance de l'espace réservé postérieur approximatif \(q(z|x)\)
- puis appliquez l' astuce de reparamétrisation pour échantillonner à partir de \(q(z|x)\)
- Enfin, passez les échantillons reparamétrés au décodeur pour obtenir les logits de la distribution générative \(p(x|z)\)
- Remarque : Étant donné que vous utilisez l'ensemble de données chargé par keras avec 60 000 points de données dans l'ensemble d'apprentissage et 10 000 points de données dans l'ensemble de test, notre résultat ELBO sur l'ensemble de test est légèrement supérieur aux résultats rapportés dans la littérature qui utilise la binarisation dynamique du MNIST de Larochelle.
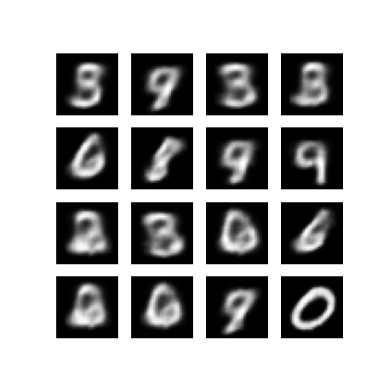
Génération d'images
- Après la formation, il est temps de générer des images
- Commencez par échantillonner un ensemble de vecteurs latents à partir de la distribution a priori gaussienne unitaire \(p(z)\)
- Le générateur convertira ensuite l'échantillon latent \(z\) en logits de l'observation, donnant une distribution \(p(x|z)\)
- Ici, tracez les probabilités des distributions de Bernoulli
epochs = 10
# set the dimensionality of the latent space to a plane for visualization later
latent_dim = 2
num_examples_to_generate = 16
# keeping the random vector constant for generation (prediction) so
# it will be easier to see the improvement.
random_vector_for_generation = tf.random.normal(
shape=[num_examples_to_generate, latent_dim])
model = CVAE(latent_dim)
def generate_and_save_images(model, epoch, test_sample):
mean, logvar = model.encode(test_sample)
z = model.reparameterize(mean, logvar)
predictions = model.sample(z)
fig = plt.figure(figsize=(4, 4))
for i in range(predictions.shape[0]):
plt.subplot(4, 4, i + 1)
plt.imshow(predictions[i, :, :, 0], cmap='gray')
plt.axis('off')
# tight_layout minimizes the overlap between 2 sub-plots
plt.savefig('image_at_epoch_{:04d}.png'.format(epoch))
plt.show()
# Pick a sample of the test set for generating output images
assert batch_size >= num_examples_to_generate
for test_batch in test_dataset.take(1):
test_sample = test_batch[0:num_examples_to_generate, :, :, :]
generate_and_save_images(model, 0, test_sample)
for epoch in range(1, epochs + 1):
start_time = time.time()
for train_x in train_dataset:
train_step(model, train_x, optimizer)
end_time = time.time()
loss = tf.keras.metrics.Mean()
for test_x in test_dataset:
loss(compute_loss(model, test_x))
elbo = -loss.result()
display.clear_output(wait=False)
print('Epoch: {}, Test set ELBO: {}, time elapse for current epoch: {}'
.format(epoch, elbo, end_time - start_time))
generate_and_save_images(model, epoch, test_sample)
Epoch: 10, Test set ELBO: -156.4964141845703, time elapse for current epoch: 4.854437351226807
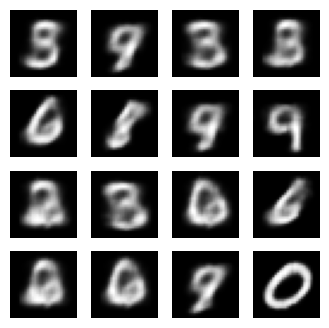
Afficher une image générée à partir de la dernière période d'entraînement
def display_image(epoch_no):
return PIL.Image.open('image_at_epoch_{:04d}.png'.format(epoch_no))
plt.imshow(display_image(epoch))
plt.axis('off') # Display images
(-0.5, 287.5, 287.5, -0.5)
Afficher un GIF animé de toutes les images enregistrées
anim_file = 'cvae.gif'
with imageio.get_writer(anim_file, mode='I') as writer:
filenames = glob.glob('image*.png')
filenames = sorted(filenames)
for filename in filenames:
image = imageio.imread(filename)
writer.append_data(image)
image = imageio.imread(filename)
writer.append_data(image)
import tensorflow_docs.vis.embed as embed
embed.embed_file(anim_file)
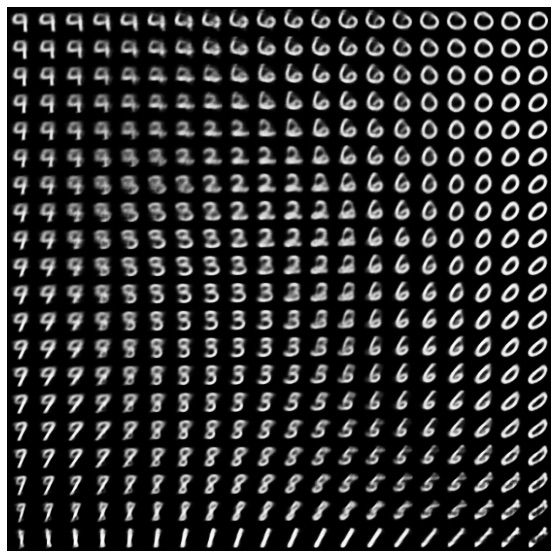
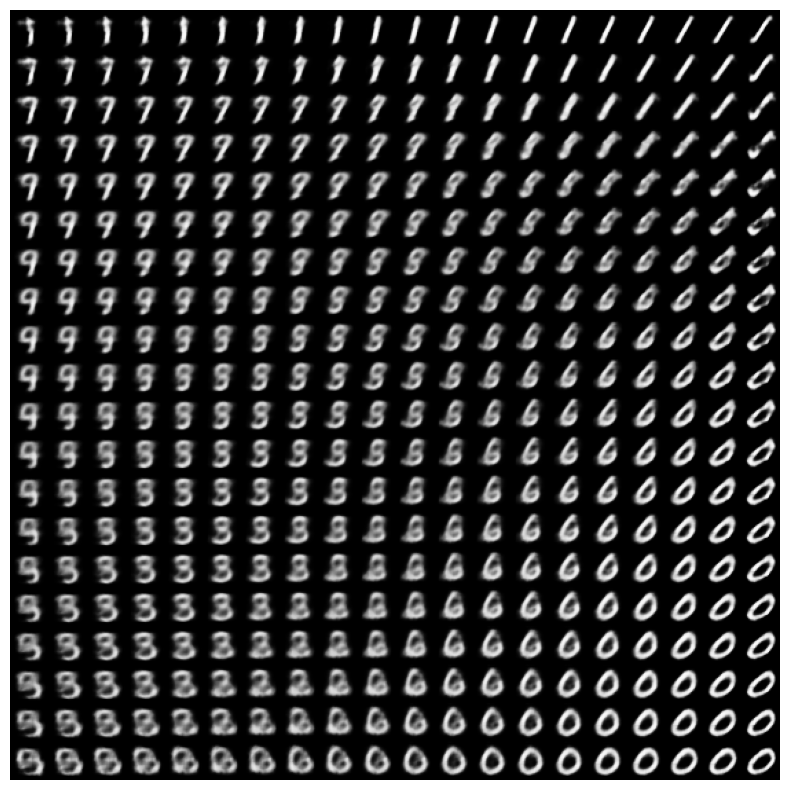
Afficher une variété 2D de chiffres à partir de l'espace latent
L'exécution du code ci-dessous montrera une distribution continue des différentes classes de chiffres, chaque chiffre se transformant en un autre dans l'espace latent 2D. Utilisez TensorFlow Probability pour générer une distribution normale standard pour l'espace latent.
def plot_latent_images(model, n, digit_size=28):
"""Plots n x n digit images decoded from the latent space."""
norm = tfp.distributions.Normal(0, 1)
grid_x = norm.quantile(np.linspace(0.05, 0.95, n))
grid_y = norm.quantile(np.linspace(0.05, 0.95, n))
image_width = digit_size*n
image_height = image_width
image = np.zeros((image_height, image_width))
for i, yi in enumerate(grid_x):
for j, xi in enumerate(grid_y):
z = np.array([[xi, yi]])
x_decoded = model.sample(z)
digit = tf.reshape(x_decoded[0], (digit_size, digit_size))
image[i * digit_size: (i + 1) * digit_size,
j * digit_size: (j + 1) * digit_size] = digit.numpy()
plt.figure(figsize=(10, 10))
plt.imshow(image, cmap='Greys_r')
plt.axis('Off')
plt.show()
plot_latent_images(model, 20)
Prochaines étapes
Ce didacticiel a montré comment implémenter un auto-encodeur variationnel convolutif à l'aide de TensorFlow.
Dans une prochaine étape, vous pouvez essayer d'améliorer la sortie du modèle en augmentant la taille du réseau. Par exemple, vous pouvez essayer de définir les paramètres de filter pour chacune des couches Conv2D et Conv2DTranspose sur 512. Notez que pour générer le tracé final de l'image latente 2D, vous devez conserver latent_dim sur 2. En outre, le temps de formation augmenterait à mesure que la taille du réseau augmente.
Vous pouvez également essayer de mettre en œuvre un VAE en utilisant un ensemble de données différent, tel que CIFAR-10.
Les VAE peuvent être mis en œuvre dans plusieurs styles différents et de complexité variable. Vous pouvez trouver des implémentations supplémentaires dans les sources suivantes :
- Encodeur automatique variationnel (keras.io)
- Exemple de VAE du guide "Writing custom layers and models" (tensorflow.org)
- Couches probabilistes TFP : encodeur automatique variationnel
Si vous souhaitez en savoir plus sur les détails des VAE, veuillez vous reporter à An Introduction to Variational Autoencoders .