| | |  عرض على جيثب عرض على جيثب | | |
TensorFlow محور (TF-المحور) هو منبر لتبادل الخبرات والتعلم الآلي وتعبئتها في موارد قابلة لإعادة الاستخدام، وحدات خصوصا قبل المدربين.
في هذا colab، سوف نستخدم وحدة نمطية حزم و DELF الشبكة العصبية والمنطق لمعالجة الصور لتحديد النقاط الرئيسية واصفات الخاصة بهم. تم تدريب أوزان الشبكة العصبية على الصور من المعالم كما هو موضح في هذه الورقة .
يثبت
pip install scikit-image
from absl import logging
import matplotlib.pyplot as plt
import numpy as np
from PIL import Image, ImageOps
from scipy.spatial import cKDTree
from skimage.feature import plot_matches
from skimage.measure import ransac
from skimage.transform import AffineTransform
from six import BytesIO
import tensorflow as tf
import tensorflow_hub as hub
from six.moves.urllib.request import urlopen
البيانات
في الخلية التالية ، نحدد عناوين URL لصورتين نرغب في معالجتهما باستخدام DELF لمطابقتهما ومقارنتهما.
اختر الصور
images = "Bridge of Sighs"
if images == "Bridge of Sighs":
# from: https://commons.wikimedia.org/wiki/File:Bridge_of_Sighs,_Oxford.jpg
# by: N.H. Fischer
IMAGE_1_URL = 'https://upload.wikimedia.org/wikipedia/commons/2/28/Bridge_of_Sighs%2C_Oxford.jpg'
# from https://commons.wikimedia.org/wiki/File:The_Bridge_of_Sighs_and_Sheldonian_Theatre,_Oxford.jpg
# by: Matthew Hoser
IMAGE_2_URL = 'https://upload.wikimedia.org/wikipedia/commons/c/c3/The_Bridge_of_Sighs_and_Sheldonian_Theatre%2C_Oxford.jpg'
elif images == "Golden Gate":
IMAGE_1_URL = 'https://upload.wikimedia.org/wikipedia/commons/1/1e/Golden_gate2.jpg'
IMAGE_2_URL = 'https://upload.wikimedia.org/wikipedia/commons/3/3e/GoldenGateBridge.jpg'
elif images == "Acropolis":
IMAGE_1_URL = 'https://upload.wikimedia.org/wikipedia/commons/c/ce/2006_01_21_Ath%C3%A8nes_Parth%C3%A9non.JPG'
IMAGE_2_URL = 'https://upload.wikimedia.org/wikipedia/commons/5/5c/ACROPOLIS_1969_-_panoramio_-_jean_melis.jpg'
else:
IMAGE_1_URL = 'https://upload.wikimedia.org/wikipedia/commons/d/d8/Eiffel_Tower%2C_November_15%2C_2011.jpg'
IMAGE_2_URL = 'https://upload.wikimedia.org/wikipedia/commons/a/a8/Eiffel_Tower_from_immediately_beside_it%2C_Paris_May_2008.jpg'
قم بتنزيل الصور وتغيير حجمها وحفظها وعرضها.
def download_and_resize(name, url, new_width=256, new_height=256):
path = tf.keras.utils.get_file(url.split('/')[-1], url)
image = Image.open(path)
image = ImageOps.fit(image, (new_width, new_height), Image.ANTIALIAS)
return image
image1 = download_and_resize('image_1.jpg', IMAGE_1_URL)
image2 = download_and_resize('image_2.jpg', IMAGE_2_URL)
plt.subplot(1,2,1)
plt.imshow(image1)
plt.subplot(1,2,2)
plt.imshow(image2)
Downloading data from https://upload.wikimedia.org/wikipedia/commons/2/28/Bridge_of_Sighs%2C_Oxford.jpg 7020544/7013850 [==============================] - 0s 0us/step 7028736/7013850 [==============================] - 0s 0us/step Downloading data from https://upload.wikimedia.org/wikipedia/commons/c/c3/The_Bridge_of_Sighs_and_Sheldonian_Theatre%2C_Oxford.jpg 14172160/14164194 [==============================] - 1s 0us/step 14180352/14164194 [==============================] - 1s 0us/step <matplotlib.image.AxesImage at 0x7f333b5e2d10>

تطبيق وحدة DELF على البيانات
تأخذ وحدة DELF صورة كمدخلات وسوف تصف النقاط الجديرة بالملاحظة مع المتجهات. تحتوي الخلية التالية على جوهر منطق كولاب هذا.
delf = hub.load('https://tfhub.dev/google/delf/1').signatures['default']
def run_delf(image):
np_image = np.array(image)
float_image = tf.image.convert_image_dtype(np_image, tf.float32)
return delf(
image=float_image,
score_threshold=tf.constant(100.0),
image_scales=tf.constant([0.25, 0.3536, 0.5, 0.7071, 1.0, 1.4142, 2.0]),
max_feature_num=tf.constant(1000))
result1 = run_delf(image1)
result2 = run_delf(image2)
استخدم ناقلات المواقع والوصف لمطابقة الصور
TensorFlow ليس ضروريًا لهذه المعالجة اللاحقة والتصور
def match_images(image1, image2, result1, result2):
distance_threshold = 0.8
# Read features.
num_features_1 = result1['locations'].shape[0]
print("Loaded image 1's %d features" % num_features_1)
num_features_2 = result2['locations'].shape[0]
print("Loaded image 2's %d features" % num_features_2)
# Find nearest-neighbor matches using a KD tree.
d1_tree = cKDTree(result1['descriptors'])
_, indices = d1_tree.query(
result2['descriptors'],
distance_upper_bound=distance_threshold)
# Select feature locations for putative matches.
locations_2_to_use = np.array([
result2['locations'][i,]
for i in range(num_features_2)
if indices[i] != num_features_1
])
locations_1_to_use = np.array([
result1['locations'][indices[i],]
for i in range(num_features_2)
if indices[i] != num_features_1
])
# Perform geometric verification using RANSAC.
_, inliers = ransac(
(locations_1_to_use, locations_2_to_use),
AffineTransform,
min_samples=3,
residual_threshold=20,
max_trials=1000)
print('Found %d inliers' % sum(inliers))
# Visualize correspondences.
_, ax = plt.subplots()
inlier_idxs = np.nonzero(inliers)[0]
plot_matches(
ax,
image1,
image2,
locations_1_to_use,
locations_2_to_use,
np.column_stack((inlier_idxs, inlier_idxs)),
matches_color='b')
ax.axis('off')
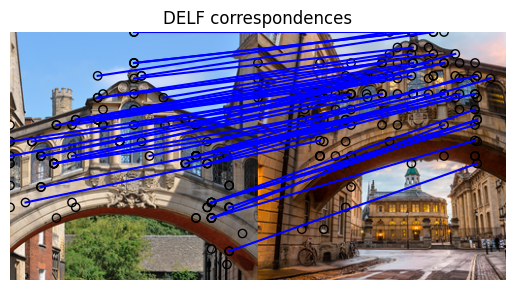
ax.set_title('DELF correspondences')
match_images(image1, image2, result1, result2)
Loaded image 1's 233 features Loaded image 2's 262 features Found 49 inliers