
حق چاپ 2021 نویسندگان TF-Agents.
| | |  مشاهده منبع در GitHub مشاهده منبع در GitHub | |
معرفی
این مثال نشان می دهد که چگونه برای آموزش DQN (عمیق Q شبکه) عامل بر روی محیط زیست Cartpole با استفاده از کتابخانه TF-نمایندگی.

این شما را از طریق تمام اجزای یک خط لوله یادگیری تقویتی (RL) برای آموزش، ارزیابی و جمع آوری داده ها راهنمایی می کند.
برای اجرای زنده این کد، روی پیوند «اجرا در Google Colab» در بالا کلیک کنید.
برپایی
اگر وابستگی های زیر را نصب نکرده اید، اجرا کنید:
sudo apt-get updatesudo apt-get install -y xvfb ffmpeg freeglut3-devpip install 'imageio==2.4.0'pip install pyvirtualdisplaypip install tf-agents[reverb]pip install pyglet
from __future__ import absolute_import, division, print_function
import base64
import imageio
import IPython
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
import PIL.Image
import pyvirtualdisplay
import reverb
import tensorflow as tf
from tf_agents.agents.dqn import dqn_agent
from tf_agents.drivers import py_driver
from tf_agents.environments import suite_gym
from tf_agents.environments import tf_py_environment
from tf_agents.eval import metric_utils
from tf_agents.metrics import tf_metrics
from tf_agents.networks import sequential
from tf_agents.policies import py_tf_eager_policy
from tf_agents.policies import random_tf_policy
from tf_agents.replay_buffers import reverb_replay_buffer
from tf_agents.replay_buffers import reverb_utils
from tf_agents.trajectories import trajectory
from tf_agents.specs import tensor_spec
from tf_agents.utils import common
# Set up a virtual display for rendering OpenAI gym environments.
display = pyvirtualdisplay.Display(visible=0, size=(1400, 900)).start()
tf.version.VERSION
'2.6.0'
فراپارامترها
num_iterations = 20000 # @param {type:"integer"}
initial_collect_steps = 100 # @param {type:"integer"}
collect_steps_per_iteration = 1# @param {type:"integer"}
replay_buffer_max_length = 100000 # @param {type:"integer"}
batch_size = 64 # @param {type:"integer"}
learning_rate = 1e-3 # @param {type:"number"}
log_interval = 200 # @param {type:"integer"}
num_eval_episodes = 10 # @param {type:"integer"}
eval_interval = 1000 # @param {type:"integer"}
محیط
در یادگیری تقویتی (RL)، یک محیط نشان دهنده کار یا مشکلی است که باید حل شود. محیط های استاندارد را می توان در TF-نمایندگی با استفاده از ایجاد tf_agents.environments سوئیت. TF-Agents مجموعه هایی برای بارگیری محیط ها از منابعی مانند OpenAI Gym، Atari و DM Control دارد.
محیط CartPole را از مجموعه OpenAI Gym بارگیری کنید.
env_name = 'CartPole-v0'
env = suite_gym.load(env_name)
می توانید این محیط را رندر کنید تا ببینید چگونه به نظر می رسد. یک میله چرخان آزاد به یک گاری وصل شده است. هدف این است که چرخ دستی را به سمت راست یا چپ حرکت دهید تا قطب را به سمت بالا نگه دارید.
env.reset()
PIL.Image.fromarray(env.render())
environment.step روش یک طول می کشد action در محیط و یک گرداند TimeStep تاپل حاوی مشاهدات بعدی از محیط زیست و پاداش برای عمل است.
time_step_spec() روش مشخصات برای گرداند TimeStep تاپل. آن observation ویژگی نشان می دهد شکل مشاهدات، انواع داده، و محدوده مقادیر مجاز. reward ویژگی جزئیات برای پاداش را نشان می دهد.
print('Observation Spec:')
print(env.time_step_spec().observation)
Observation Spec:
BoundedArraySpec(shape=(4,), dtype=dtype('float32'), name='observation', minimum=[-4.8000002e+00 -3.4028235e+38 -4.1887903e-01 -3.4028235e+38], maximum=[4.8000002e+00 3.4028235e+38 4.1887903e-01 3.4028235e+38])
print('Reward Spec:')
print(env.time_step_spec().reward)
Reward Spec:
ArraySpec(shape=(), dtype=dtype('float32'), name='reward')
action_spec() روش شکل، انواع داده ها، و مقادیر مجاز از اقدامات معتبر می گرداند.
print('Action Spec:')
print(env.action_spec())
Action Spec:
BoundedArraySpec(shape=(), dtype=dtype('int64'), name='action', minimum=0, maximum=1)
در محیط Cartpole:
-
observationآرایه ای از 4 شناور است:- موقعیت و سرعت چرخ دستی
- موقعیت زاویه ای و سرعت قطب
-
rewardیک مقدار شناور اسکالر است -
actionیک عدد صحیح اسکالر با تنها دو مقدار ممکن باشد:-
0- "حرکت به سمت چپ" -
1- "راست حرکت می کند"
-
time_step = env.reset()
print('Time step:')
print(time_step)
action = np.array(1, dtype=np.int32)
next_time_step = env.step(action)
print('Next time step:')
print(next_time_step)
Time step:
TimeStep(
{'discount': array(1., dtype=float32),
'observation': array([-0.02109759, -0.00062286, 0.04167245, -0.03825747], dtype=float32),
'reward': array(0., dtype=float32),
'step_type': array(0, dtype=int32)})
Next time step:
TimeStep(
{'discount': array(1., dtype=float32),
'observation': array([-0.02111005, 0.1938775 , 0.0409073 , -0.31750655], dtype=float32),
'reward': array(1., dtype=float32),
'step_type': array(1, dtype=int32)})
معمولاً دو محیط نمونه سازی می شوند: یکی برای آموزش و دیگری برای ارزیابی.
train_py_env = suite_gym.load(env_name)
eval_py_env = suite_gym.load(env_name)
محیط Cartpole مانند اکثر محیط ها با پایتون خالص نوشته شده است. این است که به TensorFlow با استفاده از تبدیل TFPyEnvironment لفاف بسته بندی.
API محیط اصلی از آرایه های Numpy استفاده می کند. TFPyEnvironment تبدیل این به Tensors به آن را با عوامل Tensorflow و سیاست سازگار است.
train_env = tf_py_environment.TFPyEnvironment(train_py_env)
eval_env = tf_py_environment.TFPyEnvironment(eval_py_env)
عامل
الگوریتم مورد استفاده برای حل یک مشکل RL توسط یک نشان Agent . TF-نمایندگی فراهم می کند پیاده سازی استاندارد از انواع Agents ، از جمله:
عامل DQN را می توان در هر محیطی که فضای عمل مجزا دارد استفاده کرد.
در قلب یک عامل DQN است QNetwork ، یک مدل شبکه عصبی که می توانند یاد بگیرند به پیش بینی QValues (بازده مورد انتظار) برای همه اقدامات، با توجه به مشاهدات از محیط زیست است.
ما استفاده خواهد کرد tf_agents.networks. برای ایجاد یک QNetwork . این شبکه از دنباله ای از تشکیل tf.keras.layers.Dense لایه ها، که در آن لایه نهایی 1 خروجی برای هر عمل ممکن را داشته باشند.
fc_layer_params = (100, 50)
action_tensor_spec = tensor_spec.from_spec(env.action_spec())
num_actions = action_tensor_spec.maximum - action_tensor_spec.minimum + 1
# Define a helper function to create Dense layers configured with the right
# activation and kernel initializer.
def dense_layer(num_units):
return tf.keras.layers.Dense(
num_units,
activation=tf.keras.activations.relu,
kernel_initializer=tf.keras.initializers.VarianceScaling(
scale=2.0, mode='fan_in', distribution='truncated_normal'))
# QNetwork consists of a sequence of Dense layers followed by a dense layer
# with `num_actions` units to generate one q_value per available action as
# its output.
dense_layers = [dense_layer(num_units) for num_units in fc_layer_params]
q_values_layer = tf.keras.layers.Dense(
num_actions,
activation=None,
kernel_initializer=tf.keras.initializers.RandomUniform(
minval=-0.03, maxval=0.03),
bias_initializer=tf.keras.initializers.Constant(-0.2))
q_net = sequential.Sequential(dense_layers + [q_values_layer])
در حال حاضر استفاده tf_agents.agents.dqn.dqn_agent به یک نمونه از یک DqnAgent . علاوه بر time_step_spec ، action_spec و QNetwork، سازنده عامل نیز نیاز به یک بهینه ساز (در این مورد، AdamOptimizer )، یک تابع از دست دادن، و یک گام صحیح ضد.
optimizer = tf.keras.optimizers.Adam(learning_rate=learning_rate)
train_step_counter = tf.Variable(0)
agent = dqn_agent.DqnAgent(
train_env.time_step_spec(),
train_env.action_spec(),
q_network=q_net,
optimizer=optimizer,
td_errors_loss_fn=common.element_wise_squared_loss,
train_step_counter=train_step_counter)
agent.initialize()
سیاست های
یک خط مشی نحوه عملکرد یک عامل در یک محیط را مشخص می کند. به طور معمول، هدف از یادگیری تقویتی آموزش مدل زیربنایی است تا زمانی که خط مشی به نتیجه مطلوب برسد.
در این آموزش:
- نتیجه مطلوب این است که میله را در حالت عمودی روی گاری نگه دارید.
- سیاست یک عمل (چپ یا راست) برای هر گرداند
time_stepمشاهده است.
نمایندگان شامل دو خط مشی هستند:
-
agent.policy- سیاست اصلی است که برای ارزیابی و به کارگیری استفاده می شود. -
agent.collect_policy- یک سیاست دوم است که برای جمع آوری داده ها استفاده می شود.
eval_policy = agent.policy
collect_policy = agent.collect_policy
سیاست ها را می توان مستقل از عوامل ایجاد کرد. به عنوان مثال، استفاده از tf_agents.policies.random_tf_policy برای ایجاد یک سیاست که به طور تصادفی یک عمل برای هر انتخاب خواهد time_step .
random_policy = random_tf_policy.RandomTFPolicy(train_env.time_step_spec(),
train_env.action_spec())
برای به دست آوردن عمل از سیاست، پاسخ policy.action(time_step) روش. time_step شامل مدار بسته از محیط زیست است. این روش می گرداند PolicyStep است، که یک تاپل به نام با سه جزء است:
-
action- عمل گرفته شود (در این مورد،0یا1) -
state- مورد استفاده برای stateful به (این است که، RNN مبتنی بر) سیاست -
info- داده های کمکی مانند احتمال ورود از اقدامات
example_environment = tf_py_environment.TFPyEnvironment(
suite_gym.load('CartPole-v0'))
time_step = example_environment.reset()
random_policy.action(time_step)
PolicyStep(action=<tf.Tensor: shape=(1,), dtype=int64, numpy=array([1])>, state=(), info=())
معیارها و ارزیابی
رایج ترین معیاری که برای ارزیابی یک سیاست استفاده می شود، میانگین بازده است. بازده مجموع پاداش هایی است که هنگام اجرای یک سیاست در یک محیط برای یک قسمت به دست می آید. چندین قسمت اجرا می شود که بازدهی متوسط را ایجاد می کند.
تابع زیر میانگین بازده یک خط مشی را با توجه به خط مشی، محیط و تعدادی از قسمت ها محاسبه می کند.
def compute_avg_return(environment, policy, num_episodes=10):
total_return = 0.0
for _ in range(num_episodes):
time_step = environment.reset()
episode_return = 0.0
while not time_step.is_last():
action_step = policy.action(time_step)
time_step = environment.step(action_step.action)
episode_return += time_step.reward
total_return += episode_return
avg_return = total_return / num_episodes
return avg_return.numpy()[0]
# See also the metrics module for standard implementations of different metrics.
# https://github.com/tensorflow/agents/tree/master/tf_agents/metrics
در حال اجرا این محاسبات در random_policy عملکرد پایه در محیط نشان می دهد.
compute_avg_return(eval_env, random_policy, num_eval_episodes)
20.7
پخش مجدد بافر
به منظور پیگیری از داده های جمع آوری شده از محیط زیست، ما استفاده ی Reverb ، یک سیستم پخش کارآمد، توسعه، و آسان برای استفاده توسط Deepmind. هنگامی که ما مسیرها را جمع آوری می کنیم، داده های تجربه را ذخیره می کند و در طول آموزش مصرف می شود.
این بافر پخش مجدد با استفاده از مشخصات توصیف کننده تانسورهایی که قرار است ذخیره شوند ساخته شده است، که می توان آنها را با استفاده از agent.collect_data_spec از عامل دریافت کرد.
table_name = 'uniform_table'
replay_buffer_signature = tensor_spec.from_spec(
agent.collect_data_spec)
replay_buffer_signature = tensor_spec.add_outer_dim(
replay_buffer_signature)
table = reverb.Table(
table_name,
max_size=replay_buffer_max_length,
sampler=reverb.selectors.Uniform(),
remover=reverb.selectors.Fifo(),
rate_limiter=reverb.rate_limiters.MinSize(1),
signature=replay_buffer_signature)
reverb_server = reverb.Server([table])
replay_buffer = reverb_replay_buffer.ReverbReplayBuffer(
agent.collect_data_spec,
table_name=table_name,
sequence_length=2,
local_server=reverb_server)
rb_observer = reverb_utils.ReverbAddTrajectoryObserver(
replay_buffer.py_client,
table_name,
sequence_length=2)
[reverb/cc/platform/tfrecord_checkpointer.cc:150] Initializing TFRecordCheckpointer in /tmp/tmpcz7e0i7c. [reverb/cc/platform/tfrecord_checkpointer.cc:385] Loading latest checkpoint from /tmp/tmpcz7e0i7c [reverb/cc/platform/default/server.cc:71] Started replay server on port 21909
برای بسیاری از عوامل، collect_data_spec یک تاپل به نام به نام Trajectory ، حاوی مشخصات برای مشاهدات، اقدامات، پاداش، و موارد دیگر.
agent.collect_data_spec
Trajectory(
{'action': BoundedTensorSpec(shape=(), dtype=tf.int64, name='action', minimum=array(0), maximum=array(1)),
'discount': BoundedTensorSpec(shape=(), dtype=tf.float32, name='discount', minimum=array(0., dtype=float32), maximum=array(1., dtype=float32)),
'next_step_type': TensorSpec(shape=(), dtype=tf.int32, name='step_type'),
'observation': BoundedTensorSpec(shape=(4,), dtype=tf.float32, name='observation', minimum=array([-4.8000002e+00, -3.4028235e+38, -4.1887903e-01, -3.4028235e+38],
dtype=float32), maximum=array([4.8000002e+00, 3.4028235e+38, 4.1887903e-01, 3.4028235e+38],
dtype=float32)),
'policy_info': (),
'reward': TensorSpec(shape=(), dtype=tf.float32, name='reward'),
'step_type': TensorSpec(shape=(), dtype=tf.int32, name='step_type')})
agent.collect_data_spec._fields
('step_type',
'observation',
'action',
'policy_info',
'next_step_type',
'reward',
'discount')
جمع آوری داده ها
اکنون سیاست تصادفی را برای چند مرحله در محیط اجرا کنید و داده ها را در بافر پخش مجدد ثبت کنید.
در اینجا ما از PyDriver برای اجرای حلقه جمع آوری تجربه استفاده می کنیم. شما می توانید اطلاعات بیشتر در مورد راننده TF نمایندگی ها در ما یاد بگیرند آموزش رانندگان .
py_driver.PyDriver(
env,
py_tf_eager_policy.PyTFEagerPolicy(
random_policy, use_tf_function=True),
[rb_observer],
max_steps=initial_collect_steps).run(train_py_env.reset())
(TimeStep(
{'discount': array(1., dtype=float32),
'observation': array([ 0.04100575, 0.16847703, -0.12718087, -0.6300714 ], dtype=float32),
'reward': array(1., dtype=float32),
'step_type': array(1, dtype=int32)}),
())
بافر پخش مجدد اکنون مجموعه ای از مسیرها است.
# For the curious:
# Uncomment to peel one of these off and inspect it.
# iter(replay_buffer.as_dataset()).next()
عامل نیاز به دسترسی به بافر پخش مجدد دارد. این است که با ایجاد یک iterable ارائه tf.data.Dataset خط لوله که داده به عامل تغذیه خواهد کرد.
هر ردیف از بافر پخش تنها یک مرحله مشاهده را ذخیره می کند. اما از آنجا که عامل DQN نیاز هر دو مشاهده فعلی و بعدی برای محاسبه از دست دادن، خط لوله مجموعه داده خواهد دو ردیف مجاور برای هر آیتم در دسته ای (نمونه num_steps=2 ).
این مجموعه داده همچنین با اجرای تماس های موازی و واکشی اولیه داده ها بهینه شده است.
# Dataset generates trajectories with shape [Bx2x...]
dataset = replay_buffer.as_dataset(
num_parallel_calls=3,
sample_batch_size=batch_size,
num_steps=2).prefetch(3)
dataset
<PrefetchDataset shapes: (Trajectory(
{action: (64, 2),
discount: (64, 2),
next_step_type: (64, 2),
observation: (64, 2, 4),
policy_info: (),
reward: (64, 2),
step_type: (64, 2)}), SampleInfo(key=(64, 2), probability=(64, 2), table_size=(64, 2), priority=(64, 2))), types: (Trajectory(
{action: tf.int64,
discount: tf.float32,
next_step_type: tf.int32,
observation: tf.float32,
policy_info: (),
reward: tf.float32,
step_type: tf.int32}), SampleInfo(key=tf.uint64, probability=tf.float64, table_size=tf.int64, priority=tf.float64))>
iterator = iter(dataset)
print(iterator)
<tensorflow.python.data.ops.iterator_ops.OwnedIterator object at 0x7f3cec38cd90>
# For the curious:
# Uncomment to see what the dataset iterator is feeding to the agent.
# Compare this representation of replay data
# to the collection of individual trajectories shown earlier.
# iterator.next()
آموزش عامل
دو چیز باید در طول دوره آموزشی اتفاق بیفتد:
- جمع آوری داده ها از محیط
- از آن داده ها برای آموزش شبکه(های) عصبی عامل استفاده کنید
این مثال همچنین به صورت دوره ای خط مشی را ارزیابی می کند و امتیاز فعلی را چاپ می کند.
اجرای موارد زیر 5 دقیقه طول می کشد.
try:
%%time
except:
pass
# (Optional) Optimize by wrapping some of the code in a graph using TF function.
agent.train = common.function(agent.train)
# Reset the train step.
agent.train_step_counter.assign(0)
# Evaluate the agent's policy once before training.
avg_return = compute_avg_return(eval_env, agent.policy, num_eval_episodes)
returns = [avg_return]
# Reset the environment.
time_step = train_py_env.reset()
# Create a driver to collect experience.
collect_driver = py_driver.PyDriver(
env,
py_tf_eager_policy.PyTFEagerPolicy(
agent.collect_policy, use_tf_function=True),
[rb_observer],
max_steps=collect_steps_per_iteration)
for _ in range(num_iterations):
# Collect a few steps and save to the replay buffer.
time_step, _ = collect_driver.run(time_step)
# Sample a batch of data from the buffer and update the agent's network.
experience, unused_info = next(iterator)
train_loss = agent.train(experience).loss
step = agent.train_step_counter.numpy()
if step % log_interval == 0:
print('step = {0}: loss = {1}'.format(step, train_loss))
if step % eval_interval == 0:
avg_return = compute_avg_return(eval_env, agent.policy, num_eval_episodes)
print('step = {0}: Average Return = {1}'.format(step, avg_return))
returns.append(avg_return)
WARNING:tensorflow:From /tmpfs/src/tf_docs_env/lib/python3.7/site-packages/tensorflow/python/util/dispatch.py:206: calling foldr_v2 (from tensorflow.python.ops.functional_ops) with back_prop=False is deprecated and will be removed in a future version. Instructions for updating: back_prop=False is deprecated. Consider using tf.stop_gradient instead. Instead of: results = tf.foldr(fn, elems, back_prop=False) Use: results = tf.nest.map_structure(tf.stop_gradient, tf.foldr(fn, elems)) [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. [reverb/cc/client.cc:163] Sampler and server are owned by the same process (15446) so Table uniform_table is accessed directly without gRPC. step = 200: loss = 27.080341339111328 step = 400: loss = 3.0314550399780273 step = 600: loss = 470.9187927246094 step = 800: loss = 548.7870483398438 step = 1000: loss = 4315.17578125 step = 1000: Average Return = 48.400001525878906 step = 1200: loss = 5297.24853515625 step = 1400: loss = 11601.296875 step = 1600: loss = 60482.578125 step = 1800: loss = 802764.8125 step = 2000: loss = 1689283.0 step = 2000: Average Return = 63.400001525878906 step = 2200: loss = 4928921.0 step = 2400: loss = 5508345.0 step = 2600: loss = 17888162.0 step = 2800: loss = 23993148.0 step = 3000: loss = 10192765.0 step = 3000: Average Return = 74.0999984741211 step = 3200: loss = 88318176.0 step = 3400: loss = 77485728.0 step = 3600: loss = 3236693504.0 step = 3800: loss = 102289840.0 step = 4000: loss = 168594496.0 step = 4000: Average Return = 73.5999984741211 step = 4200: loss = 348990528.0 step = 4400: loss = 101819664.0 step = 4600: loss = 136486208.0 step = 4800: loss = 133454864.0 step = 5000: loss = 592934784.0 step = 5000: Average Return = 71.5999984741211 step = 5200: loss = 216909120.0 step = 5400: loss = 181369648.0 step = 5600: loss = 600455680.0 step = 5800: loss = 551183744.0 step = 6000: loss = 368749824.0 step = 6000: Average Return = 83.5 step = 6200: loss = 1010418176.0 step = 6400: loss = 171257856.0 step = 6600: loss = 115424904.0 step = 6800: loss = 144941152.0 step = 7000: loss = 257932752.0 step = 7000: Average Return = 107.0 step = 7200: loss = 854109248.0 step = 7400: loss = 95970128.0 step = 7600: loss = 325583744.0 step = 7800: loss = 858134016.0 step = 8000: loss = 197960128.0 step = 8000: Average Return = 124.19999694824219 step = 8200: loss = 310187552.0 step = 8400: loss = 572293760.0 step = 8600: loss = 2338323456.0 step = 8800: loss = 384659392.0 step = 9000: loss = 676924544.0 step = 9000: Average Return = 200.0 step = 9200: loss = 946199168.0 step = 9400: loss = 605189504.0 step = 9600: loss = 768988928.0 step = 9800: loss = 508231776.0 step = 10000: loss = 526518016.0 step = 10000: Average Return = 200.0 step = 10200: loss = 1461528704.0 step = 10400: loss = 709822016.0 step = 10600: loss = 2770553344.0 step = 10800: loss = 496421504.0 step = 11000: loss = 1822116864.0 step = 11000: Average Return = 200.0 step = 11200: loss = 744854208.0 step = 11400: loss = 778800384.0 step = 11600: loss = 667049216.0 step = 11800: loss = 586587648.0 step = 12000: loss = 2586833920.0 step = 12000: Average Return = 200.0 step = 12200: loss = 1002041472.0 step = 12400: loss = 1526919552.0 step = 12600: loss = 1670877056.0 step = 12800: loss = 1857608704.0 step = 13000: loss = 1040727936.0 step = 13000: Average Return = 200.0 step = 13200: loss = 1807798656.0 step = 13400: loss = 1457996544.0 step = 13600: loss = 1322671616.0 step = 13800: loss = 22940983296.0 step = 14000: loss = 1556422912.0 step = 14000: Average Return = 200.0 step = 14200: loss = 2488473600.0 step = 14400: loss = 46558289920.0 step = 14600: loss = 1958968960.0 step = 14800: loss = 4677744640.0 step = 15000: loss = 1648418304.0 step = 15000: Average Return = 200.0 step = 15200: loss = 46132723712.0 step = 15400: loss = 2189093888.0 step = 15600: loss = 1204941056.0 step = 15800: loss = 1578462080.0 step = 16000: loss = 1695949312.0 step = 16000: Average Return = 200.0 step = 16200: loss = 19554553856.0 step = 16400: loss = 2857277184.0 step = 16600: loss = 5782225408.0 step = 16800: loss = 2294467072.0 step = 17000: loss = 2397877248.0 step = 17000: Average Return = 200.0 step = 17200: loss = 2910329088.0 step = 17400: loss = 6317301760.0 step = 17600: loss = 2733602048.0 step = 17800: loss = 32502740992.0 step = 18000: loss = 6295858688.0 step = 18000: Average Return = 200.0 step = 18200: loss = 2564860160.0 step = 18400: loss = 76450430976.0 step = 18600: loss = 6347636736.0 step = 18800: loss = 6258629632.0 step = 19000: loss = 8091572224.0 step = 19000: Average Return = 200.0 step = 19200: loss = 3860335616.0 step = 19400: loss = 3552561152.0 step = 19600: loss = 4175943424.0 step = 19800: loss = 5975838720.0 step = 20000: loss = 4709884928.0 step = 20000: Average Return = 200.0
تجسم
توطئه ها
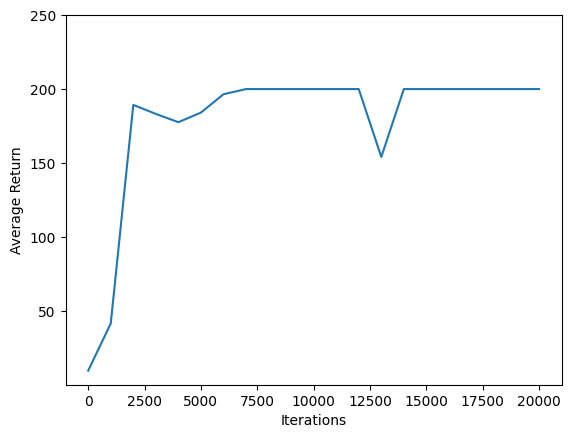
استفاده از matplotlib.pyplot به نمودار چگونه سیاست در طول آموزش بهبود یافته است.
یک تکرار از Cartpole-v0 شامل 200 مرحله است. محیط زیست می دهد جایزه از +1 برای هر مرحله باقی می ماند قطب، بنابراین بازگشت حداکثر یک قسمت 200. نمودار نشان می دهد بازگشت افزایش نسبت به آن حداکثر در هر زمان آن است که در طول آموزش ارزیابی می گردد. (ممکن است کمی ناپایدار باشد و هر بار به صورت یکنواخت افزایش نیابد.)
iterations = range(0, num_iterations + 1, eval_interval)
plt.plot(iterations, returns)
plt.ylabel('Average Return')
plt.xlabel('Iterations')
plt.ylim(top=250)
(40.82000160217285, 250.0)
فیلم های
نمودارها خوب هستند اما هیجان انگیزتر این است که ببینیم یک عامل واقعاً یک وظیفه را در یک محیط انجام می دهد.
ابتدا یک تابع برای جاسازی ویدیوها در نوت بوک ایجاد کنید.
def embed_mp4(filename):
"""Embeds an mp4 file in the notebook."""
video = open(filename,'rb').read()
b64 = base64.b64encode(video)
tag = '''
<video width="640" height="480" controls>
<source src="data:video/mp4;base64,{0}" type="video/mp4">
Your browser does not support the video tag.
</video>'''.format(b64.decode())
return IPython.display.HTML(tag)
اکنون چند قسمت از بازی Cartpole را با عامل تکرار کنید. پایتون محیط اساسی (یکی به "درون" TensorFlow محیط لفاف بسته بندی) یک فراهم می کند render() روش، که خروجی تصویری از دولت محیط زیست است. اینها را می توان در یک ویدیو جمع آوری کرد.
def create_policy_eval_video(policy, filename, num_episodes=5, fps=30):
filename = filename + ".mp4"
with imageio.get_writer(filename, fps=fps) as video:
for _ in range(num_episodes):
time_step = eval_env.reset()
video.append_data(eval_py_env.render())
while not time_step.is_last():
action_step = policy.action(time_step)
time_step = eval_env.step(action_step.action)
video.append_data(eval_py_env.render())
return embed_mp4(filename)
create_policy_eval_video(agent.policy, "trained-agent")
WARNING:root:IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (400, 600) to (400, 608) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to None (risking incompatibility). You may also see a FFMPEG warning concerning speedloss due to data not being aligned. [swscaler @ 0x55d99fdf83c0] Warning: data is not aligned! This can lead to a speed loss
برای سرگرمی، عامل آموزش دیده (بالا) را با عاملی که به طور تصادفی حرکت می کند مقایسه کنید. (به همین خوبی انجام نمی شود.)
create_policy_eval_video(random_policy, "random-agent")
WARNING:root:IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (400, 600) to (400, 608) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to None (risking incompatibility). You may also see a FFMPEG warning concerning speedloss due to data not being aligned. [swscaler @ 0x55ffa7fe73c0] Warning: data is not aligned! This can lead to a speed loss