
| |
|
 GitHub에서소스 보기 GitHub에서소스 보기 |
이 튜토리얼에서는 TensorFlow를 사용한 시계열 예측을 소개합니다. Convolutional/Recurrent Neural Network(CNN 및 RNN)를 포함하여 몇 가지 다른 스타일의 모델을 빌드합니다.
이 내용은 각각 하위 항목이 있는 두 부분으로 나누어 생각합니다.
- 단일 타임스텝 예측:
- 단일 특성
- 모든 특성
- 다중 스텝 예측:
- 싱글샷: 모두 한 번에 예측합니다.
- 자가 회귀: 한 번에 하나의 예측을 수행하고 결과를 모델로 피드백합니다.
설정
import os
import datetime
import IPython
import IPython.display
import matplotlib as mpl
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import seaborn as sns
import tensorflow as tf
mpl.rcParams['figure.figsize'] = (8, 6)
mpl.rcParams['axes.grid'] = False
2022-12-14 22:54:50.306096: W tensorflow/compiler/xla/stream_executor/platform/default/dso_loader.cc:64] Could not load dynamic library 'libnvinfer.so.7'; dlerror: libnvinfer.so.7: cannot open shared object file: No such file or directory 2022-12-14 22:54:50.306217: W tensorflow/compiler/xla/stream_executor/platform/default/dso_loader.cc:64] Could not load dynamic library 'libnvinfer_plugin.so.7'; dlerror: libnvinfer_plugin.so.7: cannot open shared object file: No such file or directory 2022-12-14 22:54:50.306228: W tensorflow/compiler/tf2tensorrt/utils/py_utils.cc:38] TF-TRT Warning: Cannot dlopen some TensorRT libraries. If you would like to use Nvidia GPU with TensorRT, please make sure the missing libraries mentioned above are installed properly.
날씨 데이터세트
이 튜토리얼은 막스 플랑크 생물 지구화학 연구소에서 기록한 날씨 시계열 데이터세트를 사용합니다.
이 데이터세트에는 온도, 대기압 및 습도와 같은 14가지 특성이 있습니다. 이러한 데이터는 2003년부터 시작해 10분 간격으로 수집되었습니다. 효율성을 위해 2009년과 2016년 사이에 수집된 데이터만 사용하겠습니다. 이 데이터세트 부분은 François Chollet이 자신이 저술한 책 Deep Learning with Python을 위해 준비했습니다.
zip_path = tf.keras.utils.get_file(
origin='https://storage.googleapis.com/tensorflow/tf-keras-datasets/jena_climate_2009_2016.csv.zip',
fname='jena_climate_2009_2016.csv.zip',
extract=True)
csv_path, _ = os.path.splitext(zip_path)
Downloading data from https://storage.googleapis.com/tensorflow/tf-keras-datasets/jena_climate_2009_2016.csv.zip 13568290/13568290 [==============================] - 0s 0us/step
이 튜토리얼은 시간별 예측만 다루므로 10분 간격부터 1시간까지 데이터를 서브 샘플링하는 것으로 시작합니다.
df = pd.read_csv(csv_path)
# Slice [start:stop:step], starting from index 5 take every 6th record.
df = df[5::6]
date_time = pd.to_datetime(df.pop('Date Time'), format='%d.%m.%Y %H:%M:%S')
데이터를 살펴보겠습니다. 다음은 처음 몇 개의 행입니다.
df.head()
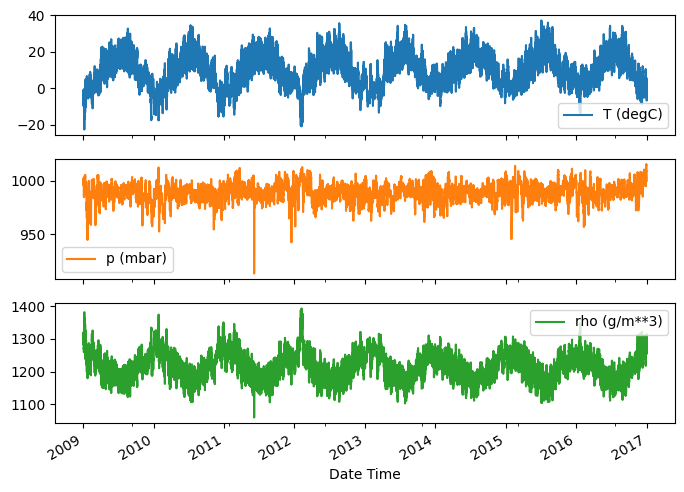
시간이 지남에 따른 몇 가지 특성의 전개 양상은 다음과 같습니다.
plot_cols = ['T (degC)', 'p (mbar)', 'rho (g/m**3)']
plot_features = df[plot_cols]
plot_features.index = date_time
_ = plot_features.plot(subplots=True)
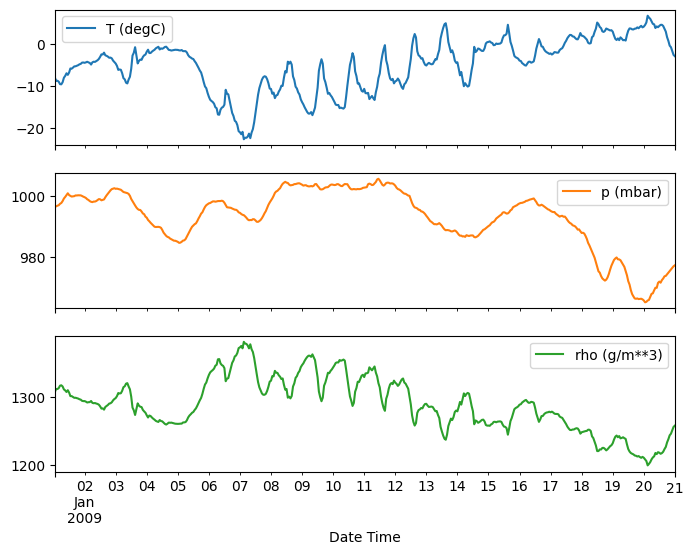
plot_features = df[plot_cols][:480]
plot_features.index = date_time[:480]
_ = plot_features.plot(subplots=True)
/tmpfs/tmp/ipykernel_750642/637349053.py:7: FutureWarning: The behavior of `series[i:j]` with an integer-dtype index is deprecated. In a future version, this will be treated as *label-based* indexing, consistent with e.g. `series[i]` lookups. To retain the old behavior, use `series.iloc[i:j]`. To get the future behavior, use `series.loc[i:j]`. plot_features.index = date_time[:480]
검사 및 정리하기
다음으로 데이터세트의 통계를 살펴봅니다.
df.describe().transpose()
풍속
한 가지 눈에 띄는 점은 풍속(wv (m/s))의 min 값과 최댓값(max. wv (m/s)) 열입니다. -9999는 오류일 수 있습니다.
별도의 풍향 열이 있으므로 속도는 0보다 커야 합니다({code 0}>=0{/code 0}). 0으로 교체합니다.
wv = df['wv (m/s)']
bad_wv = wv == -9999.0
wv[bad_wv] = 0.0
max_wv = df['max. wv (m/s)']
bad_max_wv = max_wv == -9999.0
max_wv[bad_max_wv] = 0.0
# The above inplace edits are reflected in the DataFrame.
df['wv (m/s)'].min()
0.0
특성 엔지니어링
모델을 구축하기 전에 데이터를 이해하고 모델에 적절한 형식의 데이터를 전달하고 있는지 확인하는 것이 중요합니다.
바람
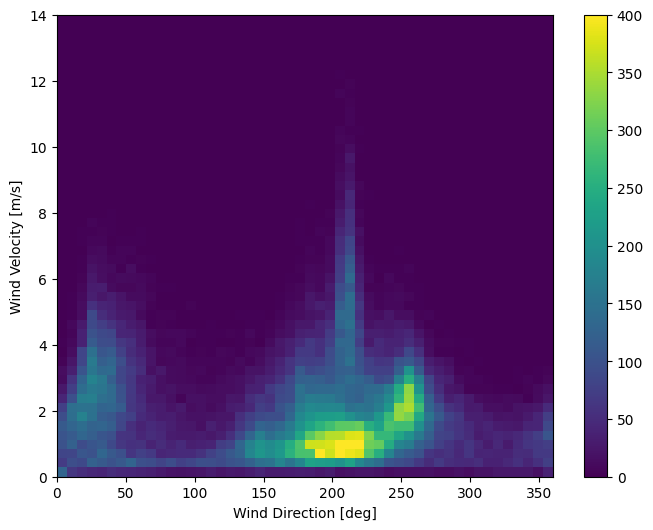
데이터의 마지막 열인 wd (deg) - 바람의 방향을 도 단위로 제공합니다. 각도는 좋은 모델 입력을 만들지 않습니다. 360°와 0°는 서로 가깝고 부드럽게 둘러싸야 합니다. 바람이 불지 않으면 방향은 중요하지 않습니다.
현재, 바람 데이터의 분포는 다음과 같습니다.
plt.hist2d(df['wd (deg)'], df['wv (m/s)'], bins=(50, 50), vmax=400)
plt.colorbar()
plt.xlabel('Wind Direction [deg]')
plt.ylabel('Wind Velocity [m/s]')
Text(0, 0.5, 'Wind Velocity [m/s]')
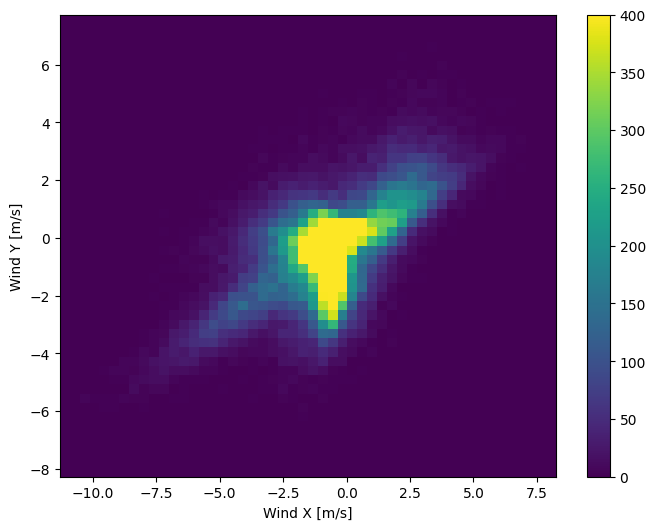
그러나 풍향과 속도 열을 바람 벡터로 변환하면 모델이 해석하기가 더 쉽습니다.
wv = df.pop('wv (m/s)')
max_wv = df.pop('max. wv (m/s)')
# Convert to radians.
wd_rad = df.pop('wd (deg)')*np.pi / 180
# Calculate the wind x and y components.
df['Wx'] = wv*np.cos(wd_rad)
df['Wy'] = wv*np.sin(wd_rad)
# Calculate the max wind x and y components.
df['max Wx'] = max_wv*np.cos(wd_rad)
df['max Wy'] = max_wv*np.sin(wd_rad)
바람 벡터의 분포는 모델이 올바르게 해석하는 데 훨씬 간단합니다.
plt.hist2d(df['Wx'], df['Wy'], bins=(50, 50), vmax=400)
plt.colorbar()
plt.xlabel('Wind X [m/s]')
plt.ylabel('Wind Y [m/s]')
ax = plt.gca()
ax.axis('tight')
(-11.305513973134667, 8.24469928549079, -8.27438540335515, 7.7338312955467785)
시간
마찬가지로 Date Time 열은 매우 유용하지만 이 문자열 형식은 아닙니다. 초로 변환하여 시작하십시오.
timestamp_s = date_time.map(pd.Timestamp.timestamp)
풍향과 유사하게 초 단위의 시간은 유용한 모델 입력이 아닙니다. 날씨 데이터이기 때문에 일별 및 연간 주기가 명확합니다. 주기성을 다룰 수 있는 방법은 여러 가지가 있습니다.
사인 및 코사인 변환을 사용하여 "시간" 및 "시간" 신호를 지우면 사용 가능한 신호를 얻을 수 있습니다.
day = 24*60*60
year = (365.2425)*day
df['Day sin'] = np.sin(timestamp_s * (2 * np.pi / day))
df['Day cos'] = np.cos(timestamp_s * (2 * np.pi / day))
df['Year sin'] = np.sin(timestamp_s * (2 * np.pi / year))
df['Year cos'] = np.cos(timestamp_s * (2 * np.pi / year))
plt.plot(np.array(df['Day sin'])[:25])
plt.plot(np.array(df['Day cos'])[:25])
plt.xlabel('Time [h]')
plt.title('Time of day signal')
Text(0.5, 1.0, 'Time of day signal')
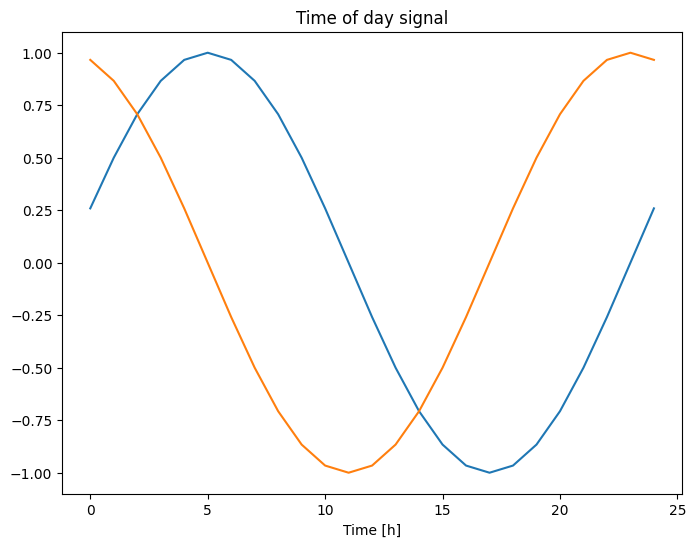
그러면 모델이 가장 중요한 빈도 특성에 액세스할 수 있습니다. 이 경우 어떤 빈도가 중요한지 미리 알고 있었습니다.
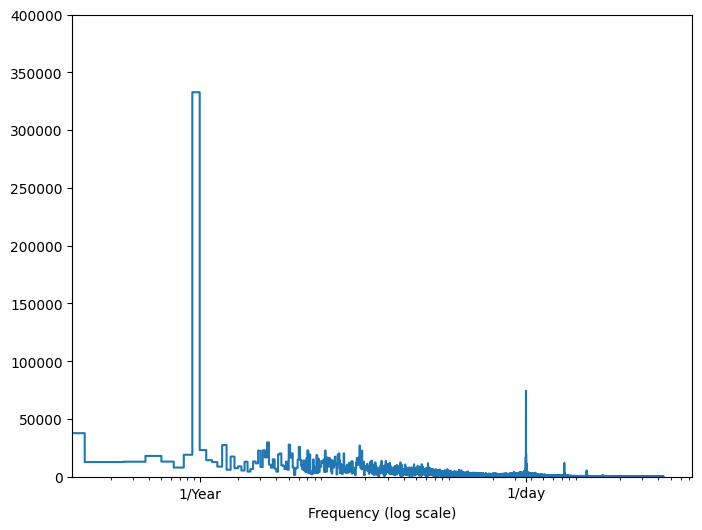
해당 정보가 없는 경우 고속 푸리에 변환을 사용하여 특성을 추출하여 중요한 빈도를 결정할 수 있습니다. 가정을 확인하기 위해 시간 경과에 따른 온도의 tf.signal.rfft가 있습니다. 1/year 및 1/day에 가까운 빈도에서 명백한 피크가 있다는 점에 주목하세요.
fft = tf.signal.rfft(df['T (degC)'])
f_per_dataset = np.arange(0, len(fft))
n_samples_h = len(df['T (degC)'])
hours_per_year = 24*365.2524
years_per_dataset = n_samples_h/(hours_per_year)
f_per_year = f_per_dataset/years_per_dataset
plt.step(f_per_year, np.abs(fft))
plt.xscale('log')
plt.ylim(0, 400000)
plt.xlim([0.1, max(plt.xlim())])
plt.xticks([1, 365.2524], labels=['1/Year', '1/day'])
_ = plt.xlabel('Frequency (log scale)')
데이터 분할
훈련, 검증 및 테스트 세트에 (70%, 20%, 10%) 분할을 사용합니다. 분할하기 전에 데이터가 임의로 셔플되지 않습니다. 이것은 두 가지 이유 때문입니다.
- 데이터를 연속된 샘플의 창으로 자르는 것이 여전히 가능합니다.
- 모델을 훈련한 후 수집된 데이터를 바탕으로 평가하므로 검증/테스트 결과가 보다 현실적입니다.
column_indices = {name: i for i, name in enumerate(df.columns)}
n = len(df)
train_df = df[0:int(n*0.7)]
val_df = df[int(n*0.7):int(n*0.9)]
test_df = df[int(n*0.9):]
num_features = df.shape[1]
데이터 정규화
신경망을 훈련하기 전에 특성의 크기를 정하는 것이 중요합니다. 정규화는 평균을 빼고 각 특성의 표준 편차로 나누어 크기 조정을 수행하는 일반적인 방법입니다.
모델이 검증 및 테스트 세트의 값에 액세스할 수 없도록 훈련 데이터를 사용해서만 평균 및 표준 편차를 계산해야 합니다.
또한 모델이 훈련할 때 훈련 세트의 미래 값에 액세스할 수 없어야 하고 이 정규화가 이동 평균을 사용하여 수행되어야 한다고 말할 수도 있습니다. 이 내용은 본 튜토리얼의 중점 사항이 아니며, 검증 및 테스트 세트가 있기 때문에 (다소) 정직한 메트릭을 얻을 수 있습니다. 따라서 단순화를 위해 이 튜토리얼에서는 단순 평균을 사용합니다.
train_mean = train_df.mean()
train_std = train_df.std()
train_df = (train_df - train_mean) / train_std
val_df = (val_df - train_mean) / train_std
test_df = (test_df - train_mean) / train_std
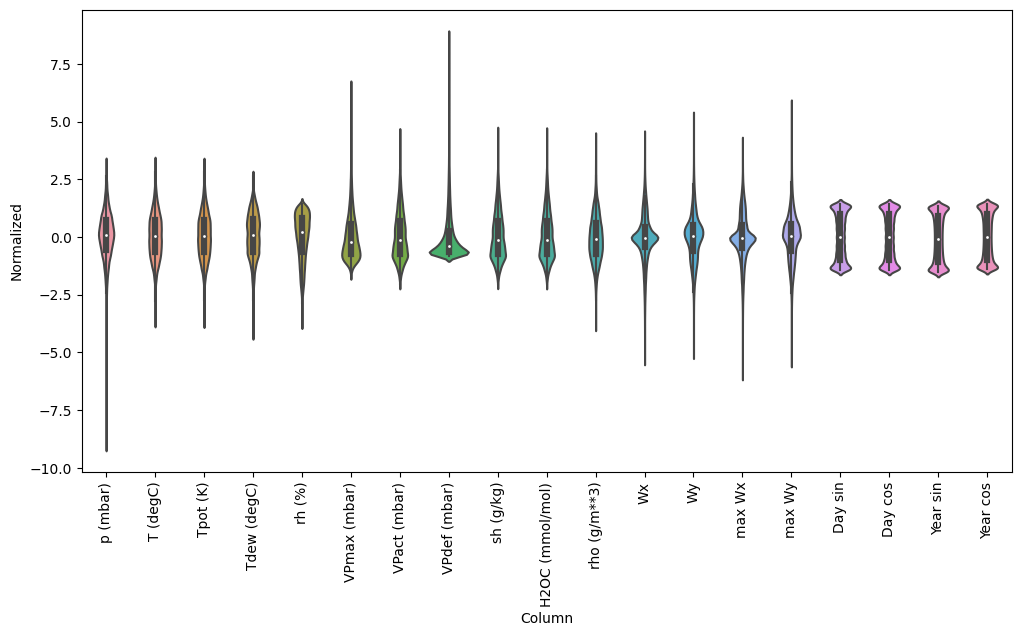
이제 특성의 분포를 살펴봅니다. 일부 특성은 꼬리가 길지만 -9999 풍속 값과 같은 명백한 오류는 없습니다.
df_std = (df - train_mean) / train_std
df_std = df_std.melt(var_name='Column', value_name='Normalized')
plt.figure(figsize=(12, 6))
ax = sns.violinplot(x='Column', y='Normalized', data=df_std)
_ = ax.set_xticklabels(df.keys(), rotation=90)
데이터 창 작업
이 튜토리얼의 모델은 데이터의 연속된 샘플 창을 기반으로 일련의 예측을 수행합니다.
입력 창의 주요 특성은 다음과 같습니다.
- 입력 및 레이블 창의 너비(타임스텝 수)
- 각 사이의 시간 오프셋
- 입력, 레이블 또는 둘 모두로 사용되는 특성
이 튜토리얼은 다양한 모델(선형, DNN, CNN 및 RNN 모델 포함)을 빌드하고 다음 두 가지 목적으로 이 모델을 사용합니다.
- 단일 출력 및 다중 출력 예측
- 단일 타임스텝 및 다중 타임스텝 예측
이 섹션에서는 모든 모델에 재사용할 수 있도록 데이터 창 작업을 구현하는 부분에 중점을 둡니다.
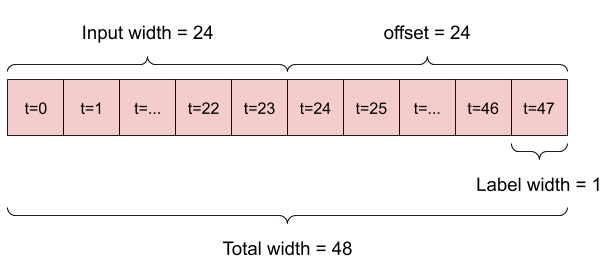
작업 및 모델 유형에 따라 다양한 데이터 창을 생성할 수 있습니다. 다음은 몇 가지 예입니다.
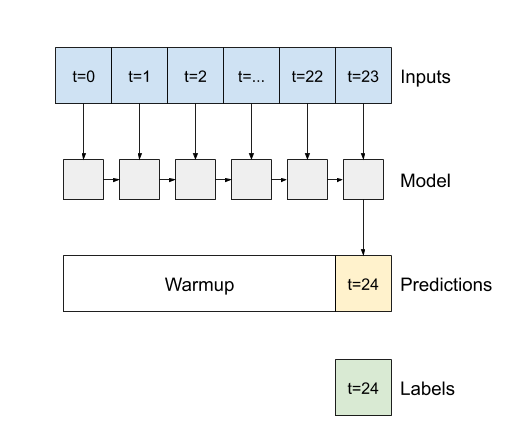
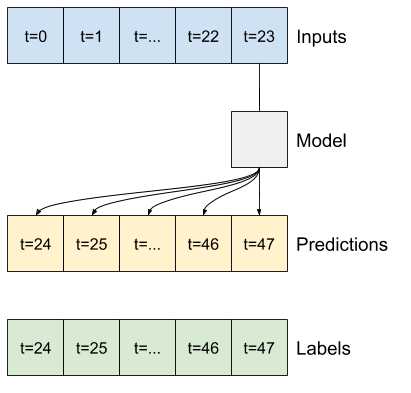
- 예를 들어, 24시간의 기록이 주어졌을 때 앞으로 24시간의 미래를 단일 예측하기 위해 다음과 같은 창을 정의할 수 있습니다.
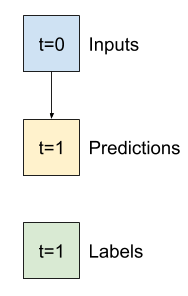
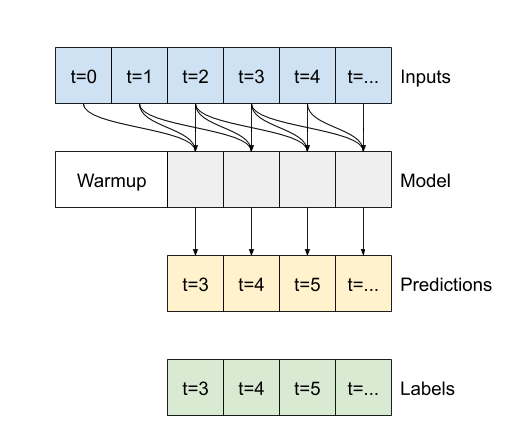
- 6시간의 기록이 주어졌을 때 앞으로 1시간의 미래를 예측하는 모델에는 다음과 같은 창이 필요할 수 있습니다.
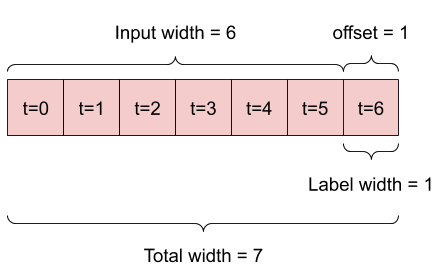
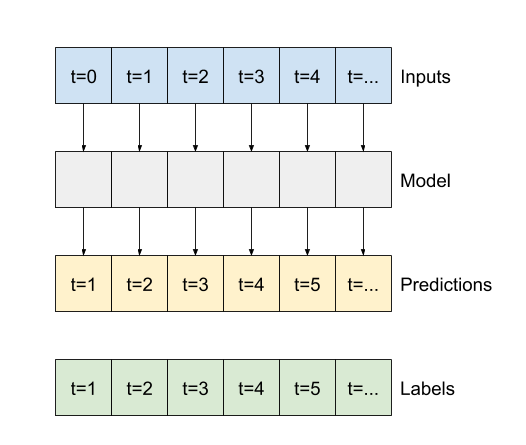
이 섹션의 나머지 부분에서는 WindowGenerator 클래스를 정의합니다. 이 클래스는 다음을 수행할 수 있습니다.
- 위의 다이어그램과 같이 인덱스와 오프셋을 처리합니다.
- 특성 창을
(features, labels)쌍으로 분할합니다. - 결과 창의 내용을 플롯합니다.
tf.data.Dataset를 사용하여 훈련, 평가 및 테스트 데이터로부터 이러한 창을 여러 배치로 효율적으로 생성합니다.
1. 인덱스 및 오프셋
우선 WindowGenerator 클래스를 만듭니다. __init__ 메서드에는 입력 및 레이블 인덱스에 필요한 모든 논리가 포함됩니다.
또한 훈련, 평가 및 테스트 DataFrame을 입력으로 사용합니다. 이러한 DataFrame은 나중에 창의 tf.data.Dataset로 변환됩니다.
class WindowGenerator():
def __init__(self, input_width, label_width, shift,
train_df=train_df, val_df=val_df, test_df=test_df,
label_columns=None):
# Store the raw data.
self.train_df = train_df
self.val_df = val_df
self.test_df = test_df
# Work out the label column indices.
self.label_columns = label_columns
if label_columns is not None:
self.label_columns_indices = {name: i for i, name in
enumerate(label_columns)}
self.column_indices = {name: i for i, name in
enumerate(train_df.columns)}
# Work out the window parameters.
self.input_width = input_width
self.label_width = label_width
self.shift = shift
self.total_window_size = input_width + shift
self.input_slice = slice(0, input_width)
self.input_indices = np.arange(self.total_window_size)[self.input_slice]
self.label_start = self.total_window_size - self.label_width
self.labels_slice = slice(self.label_start, None)
self.label_indices = np.arange(self.total_window_size)[self.labels_slice]
def __repr__(self):
return '\n'.join([
f'Total window size: {self.total_window_size}',
f'Input indices: {self.input_indices}',
f'Label indices: {self.label_indices}',
f'Label column name(s): {self.label_columns}'])
이 섹션의 시작 부분에서 다이어그램에 나타낸 두 개의 창을 만드는 코드는 다음과 같습니다.
w1 = WindowGenerator(input_width=24, label_width=1, shift=24,
label_columns=['T (degC)'])
w1
Total window size: 48 Input indices: [ 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23] Label indices: [47] Label column name(s): ['T (degC)']
w2 = WindowGenerator(input_width=6, label_width=1, shift=1,
label_columns=['T (degC)'])
w2
Total window size: 7 Input indices: [0 1 2 3 4 5] Label indices: [6] Label column name(s): ['T (degC)']
2. 분할
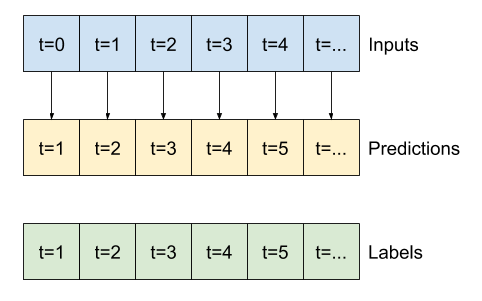
연속적인 입력 목록이 주어지면 split_window 메서드는 이 목록을 입력 창과 레이블 창으로 변환합니다.
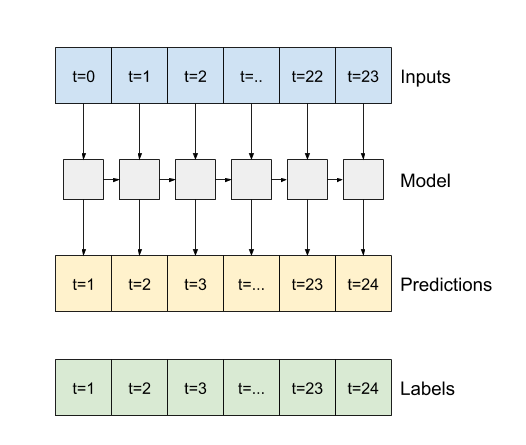
위에서 정의한 예제 w2는 다음과 같이 분할됩니다.

이 다이어그램에는 데이터의 features 축이 나와 있지 않지만 이 split_window 함수는 단일 출력과 다중 출력 예에서 모두 사용될 수 있도록 label_columns를 처리합니다.
def split_window(self, features):
inputs = features[:, self.input_slice, :]
labels = features[:, self.labels_slice, :]
if self.label_columns is not None:
labels = tf.stack(
[labels[:, :, self.column_indices[name]] for name in self.label_columns],
axis=-1)
# Slicing doesn't preserve static shape information, so set the shapes
# manually. This way the `tf.data.Datasets` are easier to inspect.
inputs.set_shape([None, self.input_width, None])
labels.set_shape([None, self.label_width, None])
return inputs, labels
WindowGenerator.split_window = split_window
다음을 사용해 보세요.
# Stack three slices, the length of the total window.
example_window = tf.stack([np.array(train_df[:w2.total_window_size]),
np.array(train_df[100:100+w2.total_window_size]),
np.array(train_df[200:200+w2.total_window_size])])
example_inputs, example_labels = w2.split_window(example_window)
print('All shapes are: (batch, time, features)')
print(f'Window shape: {example_window.shape}')
print(f'Inputs shape: {example_inputs.shape}')
print(f'Labels shape: {example_labels.shape}')
All shapes are: (batch, time, features) Window shape: (3, 7, 19) Inputs shape: (3, 6, 19) Labels shape: (3, 1, 1)
일반적으로 TensorFlow의 데이터는 가장 바깥 쪽 인덱스가 여러 예제("배치" 차원)에 걸쳐 있는 배열로 구성됩니다. 중간 인덱스는 "시간" 또는 "공간"(너비, 높이) 차원입니다. 가장 안쪽 인덱스는 특성입니다.
위의 코드는 3개의 7-타임스텝 창 배치를 사용하며 각 타임스텝에는 19개의 특성이 있습니다. 그러면 이것을 한 배치 당 6-타임스텝과 19개의 특성 입력 및 1-타임스텝 1-특성 레이블로 분할합니다. 레이블에는 하나의 특성만 있는데 이는 WindowGenerator가 label_columns=['T (degC)']로 초기화되었기 때문입니다. 우선 이 튜토리얼에서는 단일 출력 레이블을 예측하는 모델을 빌드합니다.
3. 플롯하기
다음은 분할 창을 간단하게 시각화할 수 있는 플롯 메서드입니다.
w2.example = example_inputs, example_labels
def plot(self, model=None, plot_col='T (degC)', max_subplots=3):
inputs, labels = self.example
plt.figure(figsize=(12, 8))
plot_col_index = self.column_indices[plot_col]
max_n = min(max_subplots, len(inputs))
for n in range(max_n):
plt.subplot(max_n, 1, n+1)
plt.ylabel(f'{plot_col} [normed]')
plt.plot(self.input_indices, inputs[n, :, plot_col_index],
label='Inputs', marker='.', zorder=-10)
if self.label_columns:
label_col_index = self.label_columns_indices.get(plot_col, None)
else:
label_col_index = plot_col_index
if label_col_index is None:
continue
plt.scatter(self.label_indices, labels[n, :, label_col_index],
edgecolors='k', label='Labels', c='#2ca02c', s=64)
if model is not None:
predictions = model(inputs)
plt.scatter(self.label_indices, predictions[n, :, label_col_index],
marker='X', edgecolors='k', label='Predictions',
c='#ff7f0e', s=64)
if n == 0:
plt.legend()
plt.xlabel('Time [h]')
WindowGenerator.plot = plot
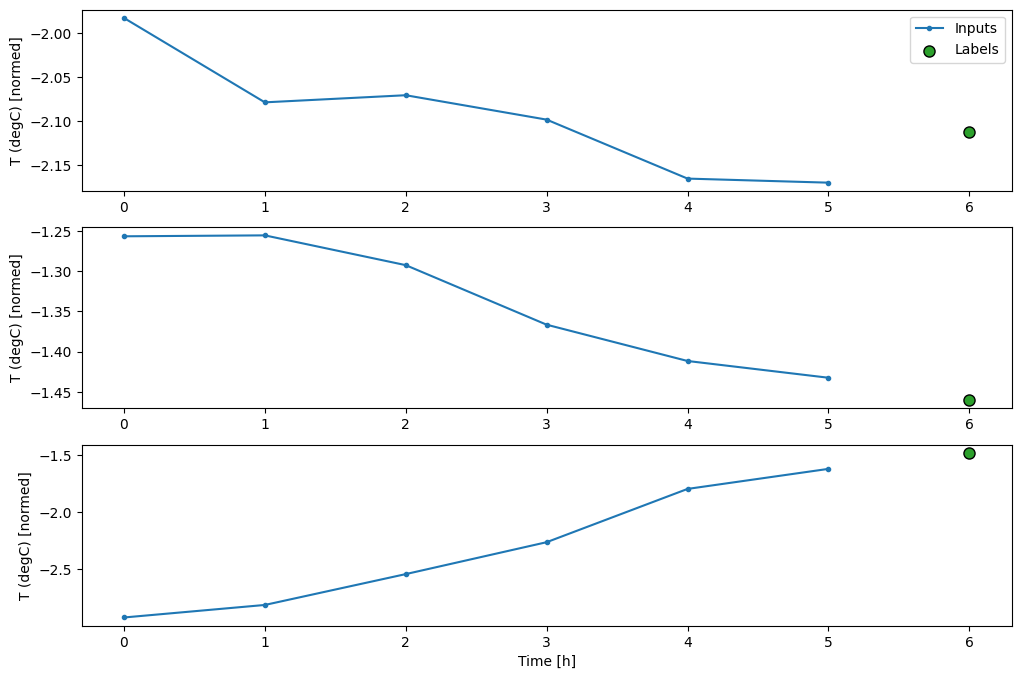
이 플롯은 항목이 참조하는 시간을 기준으로 입력, 레이블 및 (나중에) 예측값을 정렬합니다.
w2.plot()
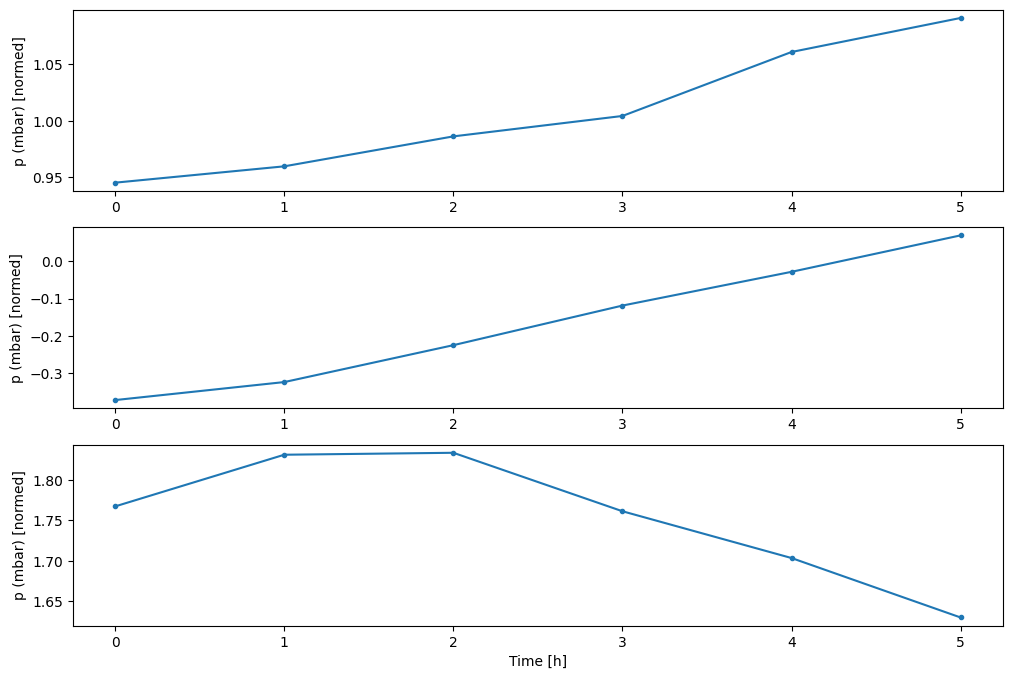
다른 열을 플롯할 수 있지만 예제 창 w2 구성에는 T (degC) 열에 대한 레이블만 있습니다.
w2.plot(plot_col='p (mbar)')
4. tf.data.Dataset 만들기
마지막으로, 이 make_dataset 메서드는 시계열 DataFrame을 가져와 tf.keras.utils.timeseries_dataset_from_array 함수를 이용해 (input_window, label_window) 쌍의 tf.data.Dataset로 변환합니다.
def make_dataset(self, data):
data = np.array(data, dtype=np.float32)
ds = tf.keras.utils.timeseries_dataset_from_array(
data=data,
targets=None,
sequence_length=self.total_window_size,
sequence_stride=1,
shuffle=True,
batch_size=32,)
ds = ds.map(self.split_window)
return ds
WindowGenerator.make_dataset = make_dataset
WindowGenerator 객체는 훈련, 검증, 테스트 데이터를 보존합니다.
앞에서 정의한 make_dataset 메서드를 사용하여 tf.data.Dataset로 액세스하기 위한 속성을 추가합니다. 또한 쉽게 액세스하고 플로팅할 수 있도록 표준 예제 배치를 추가합니다.
@property
def train(self):
return self.make_dataset(self.train_df)
@property
def val(self):
return self.make_dataset(self.val_df)
@property
def test(self):
return self.make_dataset(self.test_df)
@property
def example(self):
"""Get and cache an example batch of `inputs, labels` for plotting."""
result = getattr(self, '_example', None)
if result is None:
# No example batch was found, so get one from the `.train` dataset
result = next(iter(self.train))
# And cache it for next time
self._example = result
return result
WindowGenerator.train = train
WindowGenerator.val = val
WindowGenerator.test = test
WindowGenerator.example = example
이제 WindowGenerator 객체가 tf.data.Dataset 객체에 대한 액세스 권한을 부여하므로 데이터를 쉽게 반복할 수 있습니다.
Dataset.element_spec 속성은 데이터세트 요소의 구조, 데이터 유형, 형상을 알려줍니다.
# Each element is an (inputs, label) pair.
w2.train.element_spec
(TensorSpec(shape=(None, 6, 19), dtype=tf.float32, name=None), TensorSpec(shape=(None, 1, 1), dtype=tf.float32, name=None))
Dataset를 반복하면 구체적인 배치가 생성됩니다.
for example_inputs, example_labels in w2.train.take(1):
print(f'Inputs shape (batch, time, features): {example_inputs.shape}')
print(f'Labels shape (batch, time, features): {example_labels.shape}')
Inputs shape (batch, time, features): (32, 6, 19) Labels shape (batch, time, features): (32, 1, 1)
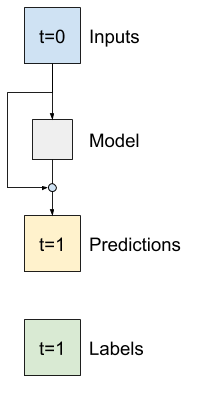
단일 스텝 모델
이러한 종류의 데이터를 기반으로 빌드할 수 있는 가장 간단한 모델은 현재 조건만을 기초로 1 타임스텝(1시간) 후의 단일 특성 값을 예측하는 모델입니다.
따라서 1시간 미래의 T (degC) 값을 예측하는 모델을 빌드하는 것으로 시작하겠습니다.
다음과 같은 단일 스텝 (input, label) 쌍을 생성하도록 WindowGenerator 객체를 구성합니다.
single_step_window = WindowGenerator(
input_width=1, label_width=1, shift=1,
label_columns=['T (degC)'])
single_step_window
Total window size: 2 Input indices: [0] Label indices: [1] Label column name(s): ['T (degC)']
window 객체는 훈련, 검증 및 테스트 세트로부터 tf.data.Datasets를 생성하므로 데이터 배치를 쉽게 반복할 수 있습니다.
for example_inputs, example_labels in single_step_window.train.take(1):
print(f'Inputs shape (batch, time, features): {example_inputs.shape}')
print(f'Labels shape (batch, time, features): {example_labels.shape}')
Inputs shape (batch, time, features): (32, 1, 19) Labels shape (batch, time, features): (32, 1, 1)
기준
훈련 가능한 모델을 빌드하기 전에 나중에 더 복잡한 모델과 비교하기 위한 포인트로 성능 기준을 갖는 것이 좋습니다.
첫 번째 작업은 모든 특성의 현재 값을 고려하여 1시간 후의 온도를 예측하는 것입니다. 현재 값에는 현재 온도가 포함됩니다.
따라서 예측으로 현재 온도를 반환하여 "변화 없음"을 예측하는 모델로 시작하겠습니다. 온도가 천천히 변하기 때문에 이것은 합리적인 기준입니다. 물론, 더 미래로 들어가면 이 기준의 예측 효과를 떨어질 것입니다.
class Baseline(tf.keras.Model):
def __init__(self, label_index=None):
super().__init__()
self.label_index = label_index
def call(self, inputs):
if self.label_index is None:
return inputs
result = inputs[:, :, self.label_index]
return result[:, :, tf.newaxis]
이 모델을 인스턴스화하고 평가합니다.
baseline = Baseline(label_index=column_indices['T (degC)'])
baseline.compile(loss=tf.keras.losses.MeanSquaredError(),
metrics=[tf.keras.metrics.MeanAbsoluteError()])
val_performance = {}
performance = {}
val_performance['Baseline'] = baseline.evaluate(single_step_window.val)
performance['Baseline'] = baseline.evaluate(single_step_window.test, verbose=0)
439/439 [==============================] - 1s 2ms/step - loss: 0.0128 - mean_absolute_error: 0.0785
몇 가지 성능 메트릭을 출력했지만 모델이 얼마나 잘 동작하는지에 대한 느낌은 주지 않습니다.
WindowGenerator에는 플롯 메서드가 있지만 단일 샘플만으로는 플롯이 그다지 흥미롭지 않습니다.
따라서 한 번에 24시간 연속 입력 및 레이블 창을 생성하는 더 넓은 WindowGenerator를 만듭니다. 새로운 wide_window는 모델이 작동하는 방식을 변경하지 않습니다. 이 모델은 단일 입력 타임스텝을 기반으로 1시간 미래를을 예측합니다. 여기서 time 축은 batch 축과 같은 역할을 합니다. 각 예측은 타임스텝 사이의 상호 작용 없이 독립적으로 이루어집니다.
wide_window = WindowGenerator(
input_width=24, label_width=24, shift=1,
label_columns=['T (degC)'])
wide_window
Total window size: 25 Input indices: [ 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23] Label indices: [ 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24] Label column name(s): ['T (degC)']
이 확장된 창은 어떠한 코드 변경 없이 동일한 baseline 모델에 직접 전달할 수 있습니다. 이는 입력과 레이블이 동일한 수의 타임스텝을 가지며 기준이 입력을 출력으로 전달하기 때문에 가능합니다.
print('Input shape:', wide_window.example[0].shape)
print('Output shape:', baseline(wide_window.example[0]).shape)
Input shape: (32, 24, 19) Output shape: (32, 24, 1)
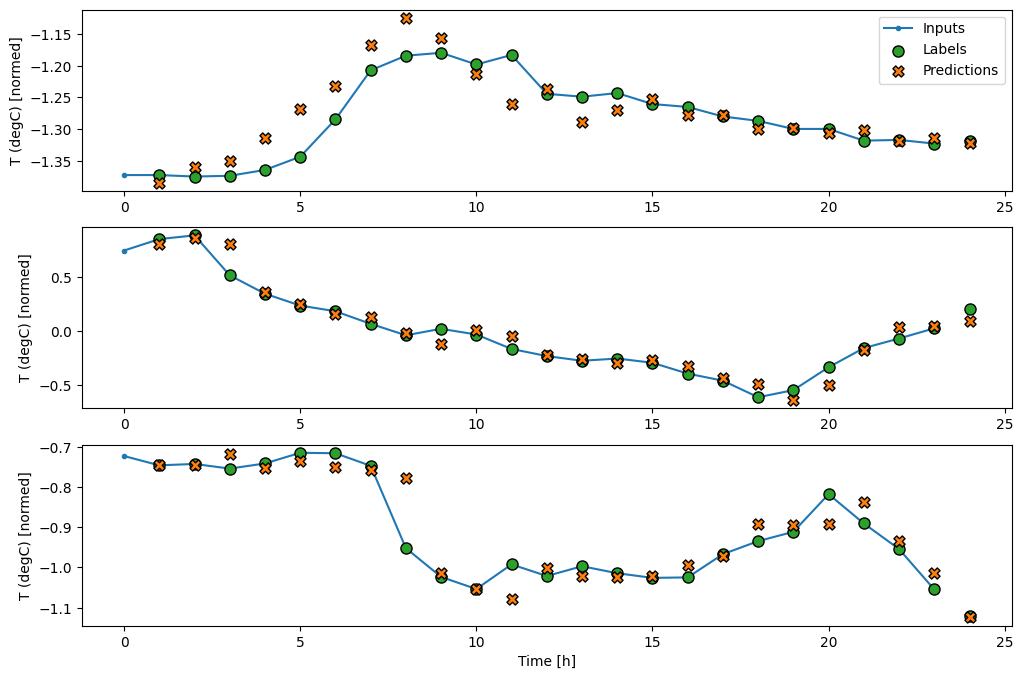
기준 모델의 예측을 플롯하면 1시간씩 오른쪽으로 이동한 단순한 레이블임을 알 수 있습니다.
wide_window.plot(baseline)
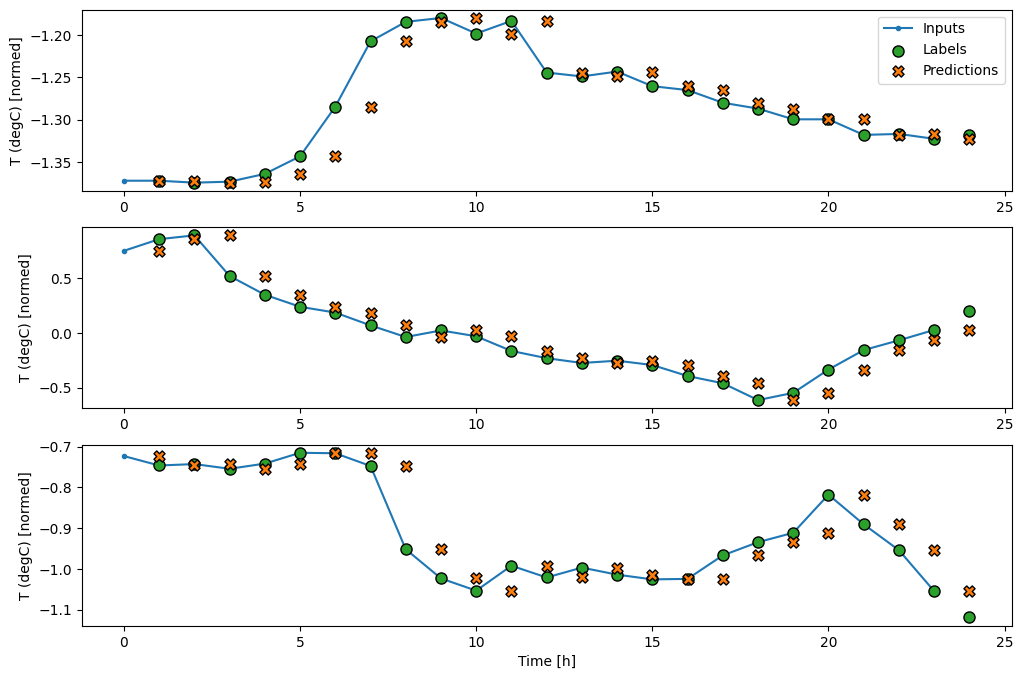
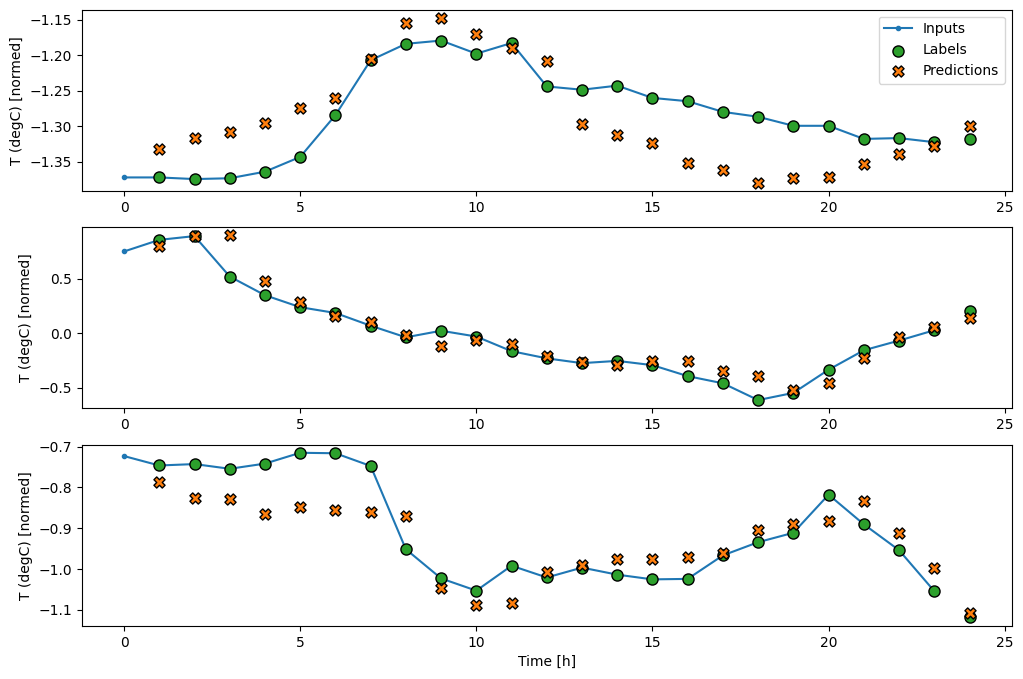
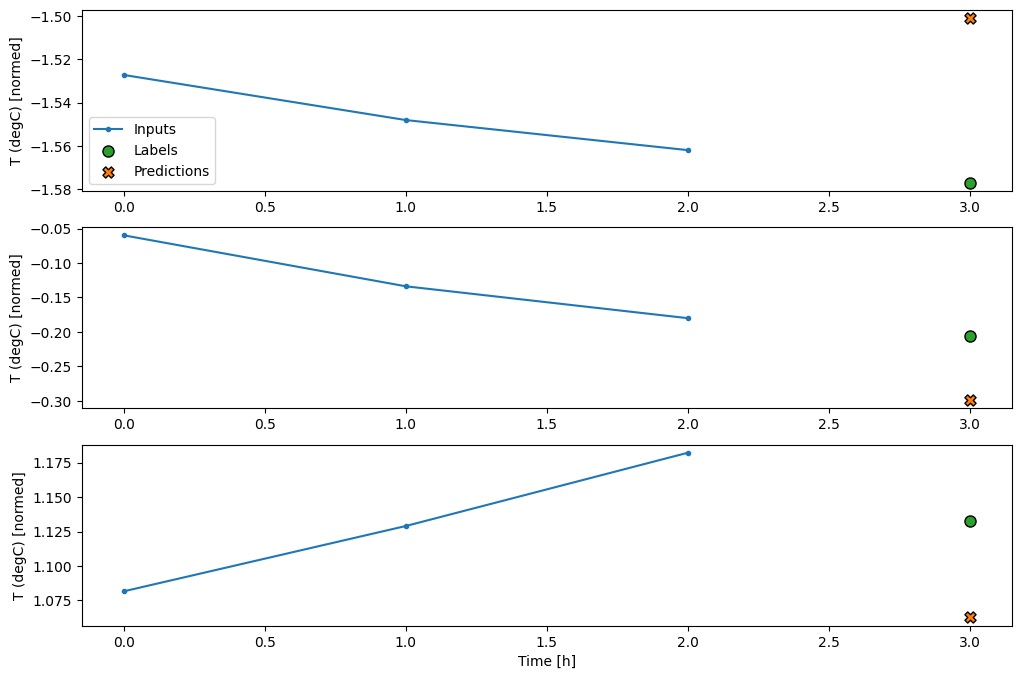
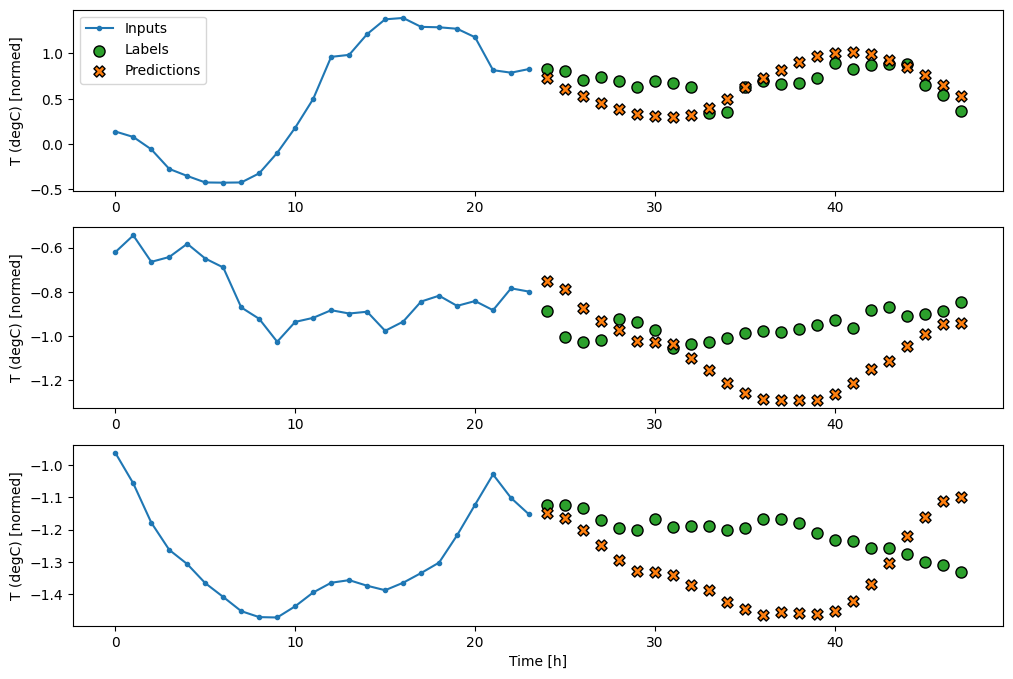
위의 세 가지 예제 플롯에서 단일 스텝 모델은 24시간 동안 실행됩니다. 이에 관해 몇 가지 설명이 필요합니다.
- 파란색
Inputs라인은 각 타임스텝의 입력 온도를 보여줍니다. 이 모델은 모든 특성을 수신하며 이 플롯은 온도만 표시합니다. - 녹색
Labels점은 목표 예측 값을 나타냅니다. 이러한 점은 입력 시간이 아니라 예측 시간에 표시됩니다. 레이벨의 범위가 입력에 상대적으로 한 스텝 이동하는 이유가 여기에 있습니다. - 주황색
Predictions십자는 각 출력 타임스텝에 대한 모델의 예측입니다. 모델이 완벽하게 예측하는 경우 예측은Labels바로 위에 놓여집니다.
선형 모델
이 작업에 적용할 수 있는 가장 간단한 훈련 가능한 모델은 입력과 출력 사이에 선형 변환을 삽입하는 것입니다. 이 경우 타임스텝의 출력은 해당 스텝에만 의존합니다.
activation 세트가 없는 tf.keras.layers.Dense는 선형 모델입니다. 레이어는 데이터의 마지막 축을 (batch, time, inputs)에서 (batch, time, units)로만 변환하며, batch 및 time 축의 모든 항목에 독립적으로 적용됩니다.
linear = tf.keras.Sequential([
tf.keras.layers.Dense(units=1)
])
print('Input shape:', single_step_window.example[0].shape)
print('Output shape:', linear(single_step_window.example[0]).shape)
Input shape: (32, 1, 19) Output shape: (32, 1, 1)
이 튜토리얼은 많은 모델을 훈련하므로 훈련 절차를 하나의 함수 패키지로 만듭니다.
MAX_EPOCHS = 20
def compile_and_fit(model, window, patience=2):
early_stopping = tf.keras.callbacks.EarlyStopping(monitor='val_loss',
patience=patience,
mode='min')
model.compile(loss=tf.keras.losses.MeanSquaredError(),
optimizer=tf.keras.optimizers.Adam(),
metrics=[tf.keras.metrics.MeanAbsoluteError()])
history = model.fit(window.train, epochs=MAX_EPOCHS,
validation_data=window.val,
callbacks=[early_stopping])
return history
모델을 훈련하고 성능을 평가합니다.
history = compile_and_fit(linear, single_step_window)
val_performance['Linear'] = linear.evaluate(single_step_window.val)
performance['Linear'] = linear.evaluate(single_step_window.test, verbose=0)
Epoch 1/20 1534/1534 [==============================] - 5s 3ms/step - loss: 0.5091 - mean_absolute_error: 0.3433 - val_loss: 0.0114 - val_mean_absolute_error: 0.0803 Epoch 2/20 1534/1534 [==============================] - 5s 3ms/step - loss: 0.0106 - mean_absolute_error: 0.0765 - val_loss: 0.0098 - val_mean_absolute_error: 0.0736 Epoch 3/20 1534/1534 [==============================] - 5s 3ms/step - loss: 0.0096 - mean_absolute_error: 0.0722 - val_loss: 0.0091 - val_mean_absolute_error: 0.0704 Epoch 4/20 1534/1534 [==============================] - 5s 3ms/step - loss: 0.0092 - mean_absolute_error: 0.0703 - val_loss: 0.0088 - val_mean_absolute_error: 0.0693 Epoch 5/20 1534/1534 [==============================] - 5s 3ms/step - loss: 0.0091 - mean_absolute_error: 0.0698 - val_loss: 0.0087 - val_mean_absolute_error: 0.0688 Epoch 6/20 1534/1534 [==============================] - 5s 3ms/step - loss: 0.0091 - mean_absolute_error: 0.0697 - val_loss: 0.0087 - val_mean_absolute_error: 0.0694 Epoch 7/20 1534/1534 [==============================] - 5s 3ms/step - loss: 0.0091 - mean_absolute_error: 0.0696 - val_loss: 0.0087 - val_mean_absolute_error: 0.0688 Epoch 8/20 1534/1534 [==============================] - 5s 3ms/step - loss: 0.0090 - mean_absolute_error: 0.0695 - val_loss: 0.0086 - val_mean_absolute_error: 0.0687 Epoch 9/20 1534/1534 [==============================] - 5s 3ms/step - loss: 0.0090 - mean_absolute_error: 0.0695 - val_loss: 0.0086 - val_mean_absolute_error: 0.0687 Epoch 10/20 1534/1534 [==============================] - 5s 3ms/step - loss: 0.0090 - mean_absolute_error: 0.0695 - val_loss: 0.0086 - val_mean_absolute_error: 0.0686 Epoch 11/20 1534/1534 [==============================] - 5s 3ms/step - loss: 0.0090 - mean_absolute_error: 0.0696 - val_loss: 0.0087 - val_mean_absolute_error: 0.0688 439/439 [==============================] - 1s 2ms/step - loss: 0.0087 - mean_absolute_error: 0.0688
baseline 모델과 마찬가지로 선형 모델은 넓은 범위의 배치에서 호출할 수 있습니다. 이러한 방식으로 모델은 연속적인 타임스텝에 대해 일련의 독립적인 예측을 수행합니다. time 축은 다른 batch 축처럼 작동합니다. 각 타임스텝에서 예측 사이에 상호 작용은 없습니다.
print('Input shape:', wide_window.example[0].shape)
print('Output shape:', baseline(wide_window.example[0]).shape)
Input shape: (32, 24, 19) Output shape: (32, 24, 1)
다음은 wide_widow에 대한 예제 예측을 플롯한 내용입니다. 많은 경우 예측이 단순히 입력 온도를 반환하는 것보다는 분명히 더 낮지만 몇 가지 경우에는 더 나쁘다는 사실에 주목하세요.
wide_window.plot(linear)
선형 모델의 한 가지 장점은 해석하기가 상대적으로 간단하다는 것입니다. 레이어의 가중치를 가져와 각 입력에 할당된 가중치를 시각화할 수 있습니다.
plt.bar(x = range(len(train_df.columns)),
height=linear.layers[0].kernel[:,0].numpy())
axis = plt.gca()
axis.set_xticks(range(len(train_df.columns)))
_ = axis.set_xticklabels(train_df.columns, rotation=90)
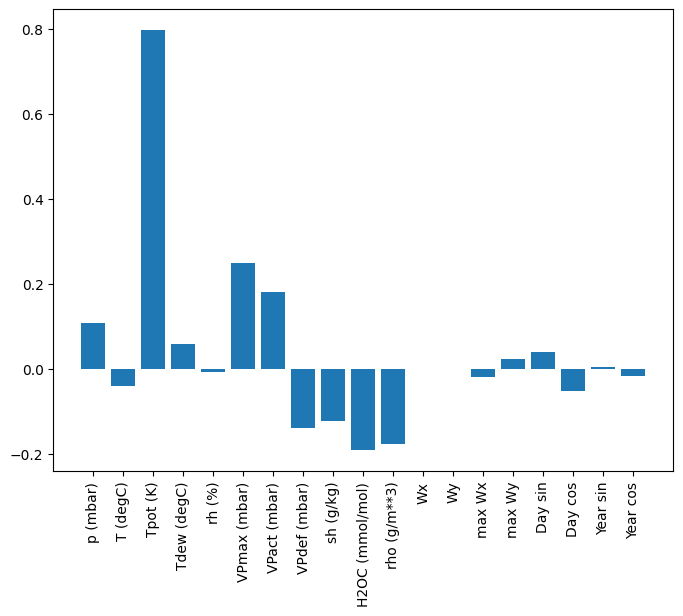
때로 모델은 입력 T (degC)에 가장 많은 가중치를 두지 않습니다. 이것은 무작위 초기화의 위험 중 하나입니다.
밀집
실제로 여러 타임스텝에서 동작하는 모델을 적용하기 전에 더 깊고 강력한 단일 입력 스텝 모델의 성능을 확인하는 것이 좋습니다.
다음 모델은 입력과 출력 사이에 몇 개의 Dense 레이어를 쌓는다는 점을 제외하면 linear 모델과 유사합니다.
dense = tf.keras.Sequential([
tf.keras.layers.Dense(units=64, activation='relu'),
tf.keras.layers.Dense(units=64, activation='relu'),
tf.keras.layers.Dense(units=1)
])
history = compile_and_fit(dense, single_step_window)
val_performance['Dense'] = dense.evaluate(single_step_window.val)
performance['Dense'] = dense.evaluate(single_step_window.test, verbose=0)
Epoch 1/20 1534/1534 [==============================] - 8s 4ms/step - loss: 0.0138 - mean_absolute_error: 0.0793 - val_loss: 0.0085 - val_mean_absolute_error: 0.0693 Epoch 2/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0079 - mean_absolute_error: 0.0645 - val_loss: 0.0075 - val_mean_absolute_error: 0.0638 Epoch 3/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0075 - mean_absolute_error: 0.0623 - val_loss: 0.0077 - val_mean_absolute_error: 0.0618 Epoch 4/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0072 - mean_absolute_error: 0.0610 - val_loss: 0.0072 - val_mean_absolute_error: 0.0620 Epoch 5/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0070 - mean_absolute_error: 0.0599 - val_loss: 0.0070 - val_mean_absolute_error: 0.0600 Epoch 6/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0070 - mean_absolute_error: 0.0597 - val_loss: 0.0067 - val_mean_absolute_error: 0.0583 Epoch 7/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0069 - mean_absolute_error: 0.0593 - val_loss: 0.0067 - val_mean_absolute_error: 0.0580 Epoch 8/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0068 - mean_absolute_error: 0.0587 - val_loss: 0.0068 - val_mean_absolute_error: 0.0578 Epoch 9/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0067 - mean_absolute_error: 0.0581 - val_loss: 0.0065 - val_mean_absolute_error: 0.0578 Epoch 10/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0067 - mean_absolute_error: 0.0580 - val_loss: 0.0067 - val_mean_absolute_error: 0.0591 Epoch 11/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0066 - mean_absolute_error: 0.0576 - val_loss: 0.0065 - val_mean_absolute_error: 0.0575 Epoch 12/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0066 - mean_absolute_error: 0.0574 - val_loss: 0.0067 - val_mean_absolute_error: 0.0593 Epoch 13/20 1534/1534 [==============================] - 6s 4ms/step - loss: 0.0065 - mean_absolute_error: 0.0569 - val_loss: 0.0066 - val_mean_absolute_error: 0.0566 439/439 [==============================] - 1s 3ms/step - loss: 0.0066 - mean_absolute_error: 0.0566
다중 스텝 밀집
단일 타임스텝 모델에는 입력의 현재 값에 대한 컨텍스트가 없습니다. 시간에 따라 입력 특성이 어떻게 변하는지 볼 수 없습니다. 이 문제를 해결하려면 모델이 예측을 수행할 때 여러 타임스텝에 액세스해야 합니다.
baseline , linear 및 dense 모델은 각 타임스텝을 독립적으로 처리했습니다. 여기서 모델은 단일 출력을 생성하기 위해 여러 타임스텝을 입력으로 사용합니다.
3시간의 입력과 1시간의 레이블 배치를 생성하는 WindowGenerator를 만듭니다.
Window의 shift 매개변수는 두 창의 끝에 상대적입니다.
CONV_WIDTH = 3
conv_window = WindowGenerator(
input_width=CONV_WIDTH,
label_width=1,
shift=1,
label_columns=['T (degC)'])
conv_window
Total window size: 4 Input indices: [0 1 2] Label indices: [3] Label column name(s): ['T (degC)']
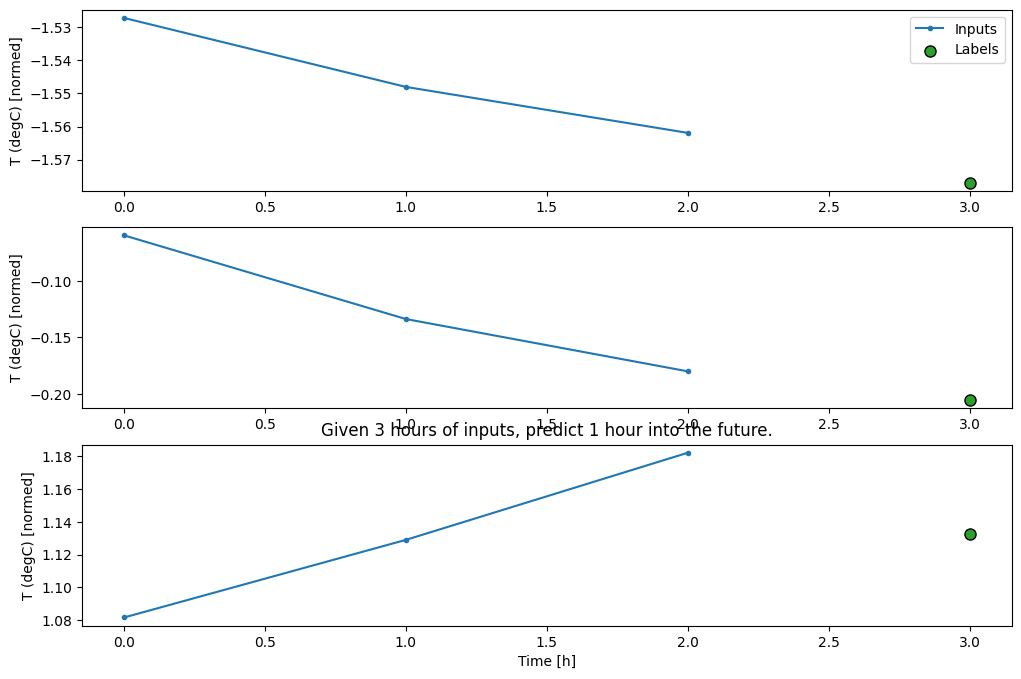
conv_window.plot()
plt.title("Given 3 hours of inputs, predict 1 hour into the future.")
Text(0.5, 1.0, 'Given 3 hours of inputs, predict 1 hour into the future.')
tf.keras.layers.Flatten을 모델의 첫 번째 레이어로 추가하여 다중 입력 스텝 창에서 dense 모델을 훈련할 수 있습니다.
multi_step_dense = tf.keras.Sequential([
# Shape: (time, features) => (time*features)
tf.keras.layers.Flatten(),
tf.keras.layers.Dense(units=32, activation='relu'),
tf.keras.layers.Dense(units=32, activation='relu'),
tf.keras.layers.Dense(units=1),
# Add back the time dimension.
# Shape: (outputs) => (1, outputs)
tf.keras.layers.Reshape([1, -1]),
])
print('Input shape:', conv_window.example[0].shape)
print('Output shape:', multi_step_dense(conv_window.example[0]).shape)
Input shape: (32, 3, 19) Output shape: (32, 1, 1)
history = compile_and_fit(multi_step_dense, conv_window)
IPython.display.clear_output()
val_performance['Multi step dense'] = multi_step_dense.evaluate(conv_window.val)
performance['Multi step dense'] = multi_step_dense.evaluate(conv_window.test, verbose=0)
438/438 [==============================] - 1s 2ms/step - loss: 0.0072 - mean_absolute_error: 0.0614
conv_window.plot(multi_step_dense)
이 접근법의 주된 단점은 결과적인 모델이 정확히 이 형상의 입력 창에서만 실행될 수 있다는 것입니다.
print('Input shape:', wide_window.example[0].shape)
try:
print('Output shape:', multi_step_dense(wide_window.example[0]).shape)
except Exception as e:
print(f'\n{type(e).__name__}:{e}')
Input shape: (32, 24, 19) ValueError:Exception encountered when calling layer 'sequential_2' (type Sequential). Input 0 of layer "dense_4" is incompatible with the layer: expected axis -1 of input shape to have value 57, but received input with shape (32, 456) Call arguments received by layer 'sequential_2' (type Sequential): • inputs=tf.Tensor(shape=(32, 24, 19), dtype=float32) • training=None • mask=None
다음 섹션의 컨볼루셔널 모델은 이 문제를 해결합니다.
컨볼루션 신경망
컨볼루션 레이어(tf.keras.layers.Conv1D)도 각 예측에 대한 입력으로 여러 타임스텝을 사용합니다.
다음은 컨볼루션으로 다시 작성한 multi_step_dense와 동일한 모델입니다.
다음 변경 사항에 주목하세요.
tf.keras.layers.Flatten과 첫 번째tf.keras.layers.Dense는tf.keras.layers.Conv1D로 대체됩니다.- 컨볼루션이 출력에서 시간 축을 유지하므로
tf.keras.layers.Reshape는 이 더 이상 필요하지 않습니다.
conv_model = tf.keras.Sequential([
tf.keras.layers.Conv1D(filters=32,
kernel_size=(CONV_WIDTH,),
activation='relu'),
tf.keras.layers.Dense(units=32, activation='relu'),
tf.keras.layers.Dense(units=1),
])
예제 배치에서 실행하여 모델이 예상한 형상으로 출력을 생성하는지 확인합니다.
print("Conv model on `conv_window`")
print('Input shape:', conv_window.example[0].shape)
print('Output shape:', conv_model(conv_window.example[0]).shape)
Conv model on `conv_window` Input shape: (32, 3, 19) Output shape: (32, 1, 1)
conv_window에서 훈련하고 평가하면 multi_step_dense 모델과 유사한 성능을 제공해야 합니다.
history = compile_and_fit(conv_model, conv_window)
IPython.display.clear_output()
val_performance['Conv'] = conv_model.evaluate(conv_window.val)
performance['Conv'] = conv_model.evaluate(conv_window.test, verbose=0)
438/438 [==============================] - 1s 3ms/step - loss: 0.0062 - mean_absolute_error: 0.0544
이 conv_model과 multi_step_dense 모델의 차이점은 conv_model은 모든 길이의 입력에서 실행될 수 있다는 것입니다. 컨볼루셔널 레이어는 입력의 슬라이딩 창에 적용됩니다.
더 넓은 입력에서 실행하면 더 넓은 출력이 생성됩니다.
print("Wide window")
print('Input shape:', wide_window.example[0].shape)
print('Labels shape:', wide_window.example[1].shape)
print('Output shape:', conv_model(wide_window.example[0]).shape)
Wide window Input shape: (32, 24, 19) Labels shape: (32, 24, 1) Output shape: (32, 22, 1)
출력은 입력보다 짧습니다. 훈련 또는 플롯 작업을 수행하려면 레이블과 예상의 길이가 동일해야 합니다. 따라서 레이블과 예측 길이가 일치하도록 몇 개의 추가 입력 타임스텝으로 넓은 창을 생성하는 WindowGenerator를 빌드합니다.
LABEL_WIDTH = 24
INPUT_WIDTH = LABEL_WIDTH + (CONV_WIDTH - 1)
wide_conv_window = WindowGenerator(
input_width=INPUT_WIDTH,
label_width=LABEL_WIDTH,
shift=1,
label_columns=['T (degC)'])
wide_conv_window
Total window size: 27 Input indices: [ 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25] Label indices: [ 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26] Label column name(s): ['T (degC)']
print("Wide conv window")
print('Input shape:', wide_conv_window.example[0].shape)
print('Labels shape:', wide_conv_window.example[1].shape)
print('Output shape:', conv_model(wide_conv_window.example[0]).shape)
Wide conv window Input shape: (32, 26, 19) Labels shape: (32, 24, 1) Output shape: (32, 24, 1)
이제 더 넓은 창에 모델의 예측을 플롯할 수 있습니다. 첫 번째 예측 전 3개의 입력 타임스텝에 주목하세요. 여기서 모든 예측은 이전 3개의 타임스텝에 기초합니다.
wide_conv_window.plot(conv_model)

순환 신경망
Recurrent Neural Network(RNN)는 시계열 데이터에 적합한 신경망 유형입니다. RNN은 시계열을 단계별로 처리하여 타임스텝 사이에서 내부 상태를 유지합니다.
RNN을 사용한 텍스트 생성 튜토리얼 및 Keras를 사용한 순환 신경망(RNN) 가이드에서 자세히 알아볼 수 있습니다.
이 튜토리얼에서는 LSTM(tf.keras.layers.LSTM)이라는 RNN 레이어를 사용합니다.
tf.keras.layers.LSTM와 같이 모든 keras RNN 레이어에 대한 중요한 생성자 인수는 return_sequences 인수입니다. 이 설정은 다음 두 가지 방법 중 하나로 레이어를 구성할 수 있습니다.
- 기본값인
False인 경우 레이어는 최종 타임스텝의 출력만 반환하여 단일 예측을 수행하기 전에 모델이 내부 상태를 준비할 시간을 줍니다.
True이면 레이어가 각 입력에 대한 출력을 반환합니다. 다음과 같은 경우에 유용합니다.- RNN 레이어 스태킹
- 여러 타임스텝에서 동시에 모델 훈련
lstm_model = tf.keras.models.Sequential([
# Shape [batch, time, features] => [batch, time, lstm_units]
tf.keras.layers.LSTM(32, return_sequences=True),
# Shape => [batch, time, features]
tf.keras.layers.Dense(units=1)
])
return_sequences=True이면 모델을 한 번에 24시간 분량 데이터에 대해 훈련할 수 있습니다.
참고: 이 경우에는 모델 성능의 관점에서 기대할 것이 없습니다. 첫 번째 타임스텝에서 모델이 이전 스텝에 액세스할 수 없으므로 이전에 표시한 단순한 linear 및 dense 모델보다 더 나을 것이 없기 때문입니다.
print('Input shape:', wide_window.example[0].shape)
print('Output shape:', lstm_model(wide_window.example[0]).shape)
Input shape: (32, 24, 19) Output shape: (32, 24, 1)
history = compile_and_fit(lstm_model, wide_window)
IPython.display.clear_output()
val_performance['LSTM'] = lstm_model.evaluate(wide_window.val)
performance['LSTM'] = lstm_model.evaluate(wide_window.test, verbose=0)
438/438 [==============================] - 1s 3ms/step - loss: 0.0056 - mean_absolute_error: 0.0515
wide_window.plot(lstm_model)
성능
이 데이터세트를 사용하면 일반적으로 각 모델의 성능이 이전 모델보다 약간 더 좋습니다.
x = np.arange(len(performance))
width = 0.3
metric_name = 'mean_absolute_error'
metric_index = lstm_model.metrics_names.index('mean_absolute_error')
val_mae = [v[metric_index] for v in val_performance.values()]
test_mae = [v[metric_index] for v in performance.values()]
plt.ylabel('mean_absolute_error [T (degC), normalized]')
plt.bar(x - 0.17, val_mae, width, label='Validation')
plt.bar(x + 0.17, test_mae, width, label='Test')
plt.xticks(ticks=x, labels=performance.keys(),
rotation=45)
_ = plt.legend()
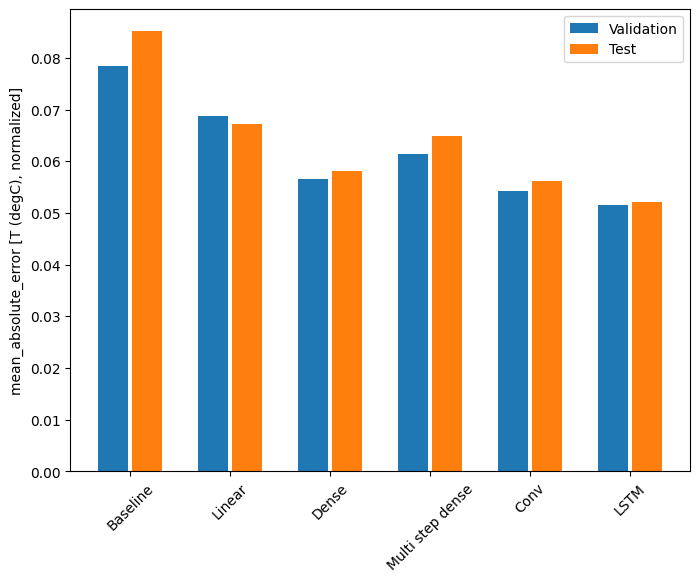
for name, value in performance.items():
print(f'{name:12s}: {value[1]:0.4f}')
Baseline : 0.0852 Linear : 0.0672 Dense : 0.0581 Multi step dense: 0.0650 Conv : 0.0561 LSTM : 0.0521
다중 출력 모델
지금까지 모델은 모두 단일 타임스텝에 대해 단일 출력 특성 T (degC)를 예측했습니다.
이러한 모든 모델은 간단히 출력 레이어의 단위 수를 변경하고 code0}labels(example_labels)에 모든 특성을 포함하도록 훈련 창을 조정하여 여러 특성을 예측하도록 변환할 수 있습니다.
single_step_window = WindowGenerator(
# `WindowGenerator` returns all features as labels if you
# don't set the `label_columns` argument.
input_width=1, label_width=1, shift=1)
wide_window = WindowGenerator(
input_width=24, label_width=24, shift=1)
for example_inputs, example_labels in wide_window.train.take(1):
print(f'Inputs shape (batch, time, features): {example_inputs.shape}')
print(f'Labels shape (batch, time, features): {example_labels.shape}')
Inputs shape (batch, time, features): (32, 24, 19) Labels shape (batch, time, features): (32, 24, 19)
레이블의 features 축은 이제 1이 아닌 입력과 동일한 깊이를 갖습니다.
기준
여기서는 동일한 기준 모델(Baseline)을 사용할 수 있지만 이번에는 특정 label_index를 선택하는 대신 모든 특성을 반복합니다.
baseline = Baseline()
baseline.compile(loss=tf.keras.losses.MeanSquaredError(),
metrics=[tf.keras.metrics.MeanAbsoluteError()])
val_performance = {}
performance = {}
val_performance['Baseline'] = baseline.evaluate(wide_window.val)
performance['Baseline'] = baseline.evaluate(wide_window.test, verbose=0)
438/438 [==============================] - 1s 2ms/step - loss: 0.0886 - mean_absolute_error: 0.1589
밀집
dense = tf.keras.Sequential([
tf.keras.layers.Dense(units=64, activation='relu'),
tf.keras.layers.Dense(units=64, activation='relu'),
tf.keras.layers.Dense(units=num_features)
])
history = compile_and_fit(dense, single_step_window)
IPython.display.clear_output()
val_performance['Dense'] = dense.evaluate(single_step_window.val)
performance['Dense'] = dense.evaluate(single_step_window.test, verbose=0)
439/439 [==============================] - 1s 3ms/step - loss: 0.0692 - mean_absolute_error: 0.1346
RNN
%%time
wide_window = WindowGenerator(
input_width=24, label_width=24, shift=1)
lstm_model = tf.keras.models.Sequential([
# Shape [batch, time, features] => [batch, time, lstm_units]
tf.keras.layers.LSTM(32, return_sequences=True),
# Shape => [batch, time, features]
tf.keras.layers.Dense(units=num_features)
])
history = compile_and_fit(lstm_model, wide_window)
IPython.display.clear_output()
val_performance['LSTM'] = lstm_model.evaluate( wide_window.val)
performance['LSTM'] = lstm_model.evaluate( wide_window.test, verbose=0)
print()
438/438 [==============================] - 1s 3ms/step - loss: 0.0620 - mean_absolute_error: 0.1206 CPU times: user 3min 58s, sys: 58.6 s, total: 4min 56s Wall time: 1min 34s
고급: 잔여 연결
이전의 Baseline 모델은 시퀀스가 타임스텝 사이에서 크게 변하지 않는다는 사실을 이용했습니다. 지금까지 이 튜토리얼에서 훈련한 모든 모델은 무작위로 초기화된 다음, 출력이 이전 타임스텝에서 약간 변경된다는 사실을 학습해야 했습니다.
신중한 초기화로 이 문제를 해결할 수 있지만 모델 구조로 빌드하는 것이 더 간단합니다.
시계열 분석에서는 다음 값을 예측하는 대신 다음 타임스텝에서 값이 어떻게 달라지는 지를 예측하는 모델을 빌드하는 것이 일반적입니다. 마찬가지로 딥러닝에서 잔여 네트워크(Residual networks) 또는 ResNets는 각 레이어가 모델의 누적 결과에 추가되는 아키텍처를 나타냅니다.
이것은 변화가 작아야 한다는 사실을 이용하는 방법입니다.
기본적으로, Baseline과 일치하도록 모델을 초기화합니다. 그러면 이 작업에서 약간 더 나은 성능으로 모델이 더 빨리 수렴시키는 데 도움이 됩니다.
이 접근 방식은 이 튜토리얼에서 설명하는 모든 모델과 연계하여 사용할 수 있습니다.
여기서는 LSTM 모델에 적용합니다. tf.initializers.zeros를 사용하여 초기 예측하는 변경이 작고 잔류 연결을 압도하지 않도록 한다는 점에 유의하세요. zeros가 마지막 레이어에서만 사용되기 때문에 여기에서 그래디언트에 대한 대칭 파괴 문제는 없습니다.
class ResidualWrapper(tf.keras.Model):
def __init__(self, model):
super().__init__()
self.model = model
def call(self, inputs, *args, **kwargs):
delta = self.model(inputs, *args, **kwargs)
# The prediction for each time step is the input
# from the previous time step plus the delta
# calculated by the model.
return inputs + delta
%%time
residual_lstm = ResidualWrapper(
tf.keras.Sequential([
tf.keras.layers.LSTM(32, return_sequences=True),
tf.keras.layers.Dense(
num_features,
# The predicted deltas should start small.
# Therefore, initialize the output layer with zeros.
kernel_initializer=tf.initializers.zeros())
]))
history = compile_and_fit(residual_lstm, wide_window)
IPython.display.clear_output()
val_performance['Residual LSTM'] = residual_lstm.evaluate(wide_window.val)
performance['Residual LSTM'] = residual_lstm.evaluate(wide_window.test, verbose=0)
print()
438/438 [==============================] - 1s 3ms/step - loss: 0.0626 - mean_absolute_error: 0.1186 CPU times: user 2min 50s, sys: 41.1 s, total: 3min 31s Wall time: 1min 7s
성능
다음은 이러한 다중 출력 모델의 전반적인 성능입니다.
x = np.arange(len(performance))
width = 0.3
metric_name = 'mean_absolute_error'
metric_index = lstm_model.metrics_names.index('mean_absolute_error')
val_mae = [v[metric_index] for v in val_performance.values()]
test_mae = [v[metric_index] for v in performance.values()]
plt.bar(x - 0.17, val_mae, width, label='Validation')
plt.bar(x + 0.17, test_mae, width, label='Test')
plt.xticks(ticks=x, labels=performance.keys(),
rotation=45)
plt.ylabel('MAE (average over all outputs)')
_ = plt.legend()
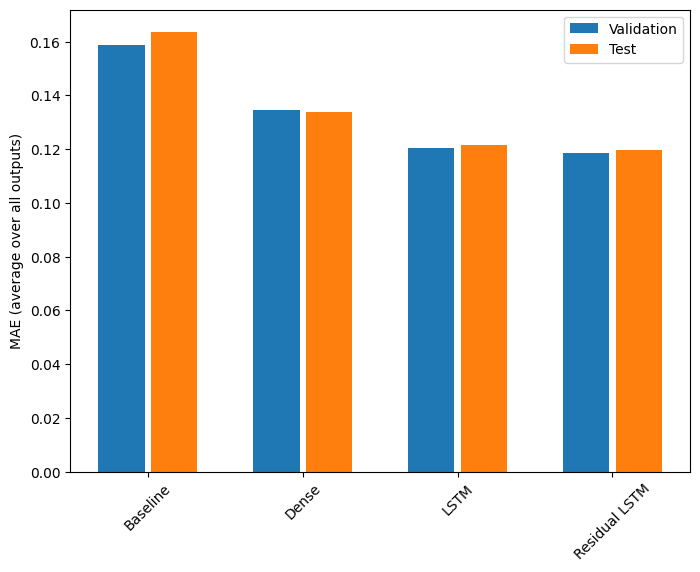
for name, value in performance.items():
print(f'{name:15s}: {value[1]:0.4f}')
Baseline : 0.1638 Dense : 0.1340 LSTM : 0.1217 Residual LSTM : 0.1196
위의 성능은 모든 모델 출력에 대한 평균입니다.
다중 스텝 모델
이전 섹션의 단일 출력 및 다중 출력 모델은 모두 미래 1시간의 단일 타임스텝 예측을 수행했습니다.
이 섹션에서는 이러한 모델을 확장하여 다중 타임스텝 예측을 수행하는 방법을 살펴봅니다.
다중 스텝 예측에서 모델은 일정 범위의 미래 값을 예측하는 방법을 학습해야 합니다. 따라서 한 미래 시점만 예측하는 단일 스텝 모델과 달리 다중 스텝 모델은 미래 값의 시퀀스를 예측합니다.
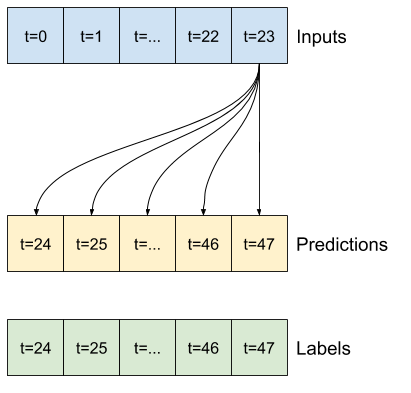
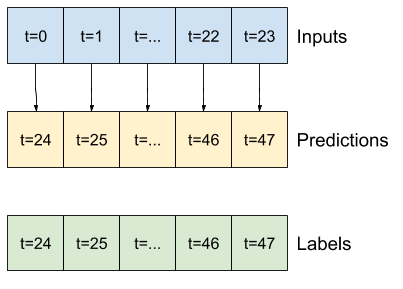
대략적으로 두 가지 접근 방식이 있습니다.
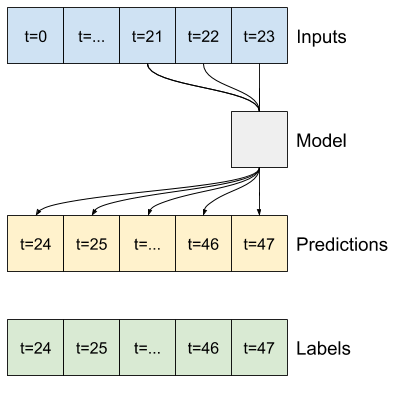
- 전체 시계열이 한 번에 예측되는 싱글샷 예측
- 모델이 단일 스텝 예측만 수행하고 출력이 입력으로 피드백되는 자기 회귀적 예측
이 섹션에서는 모든 모델이 모든 출력 타임스텝에 걸쳐 모든 특성을 예측합니다.
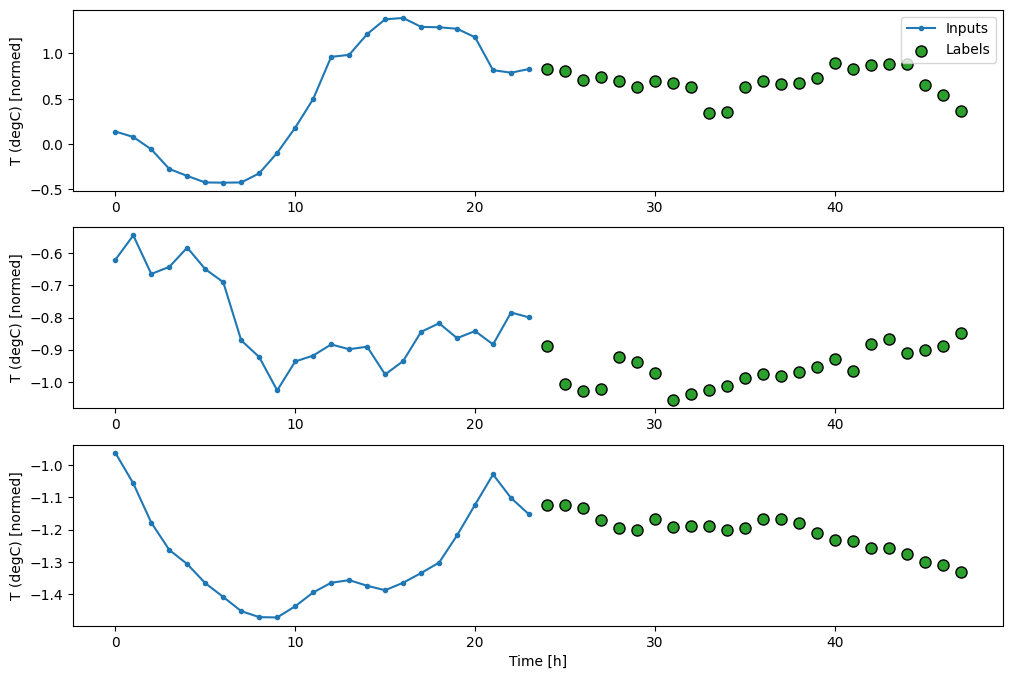
다중 스텝 모델의 경우, 훈련 데이터는 다시 시간별 샘플로 구성됩니다. 그러나 여기에서 모델은 과거의 24시간을 고려하여 미래의 24시간을 예측하는 방법을 학습합니다.
다음은 데이터세트로부터 이러한 조각을 생성하는 Window 객체입니다.
OUT_STEPS = 24
multi_window = WindowGenerator(input_width=24,
label_width=OUT_STEPS,
shift=OUT_STEPS)
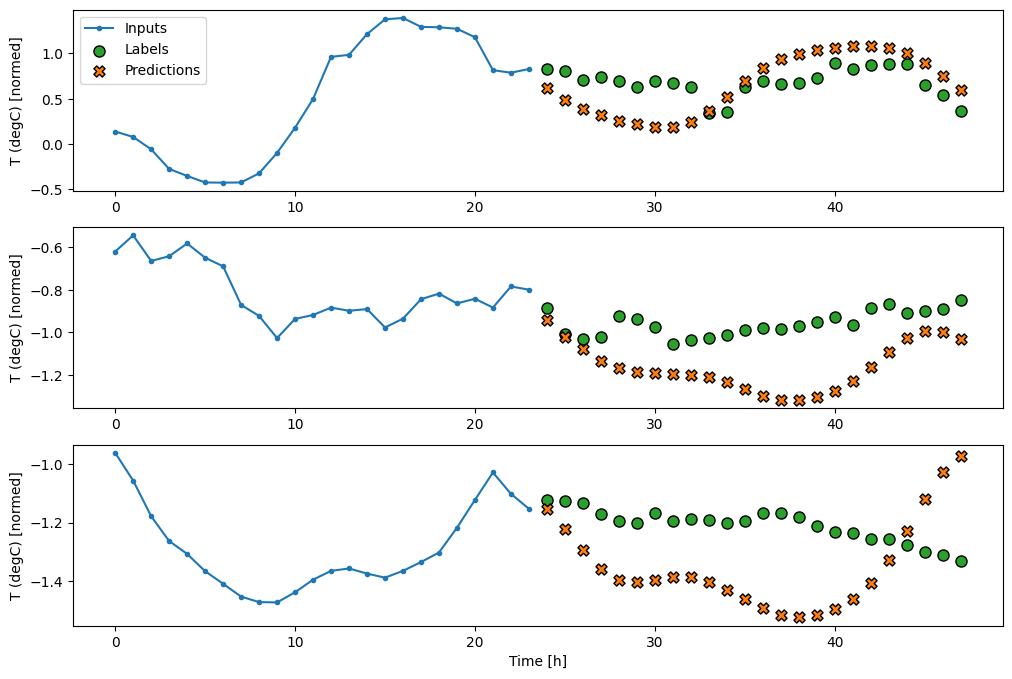
multi_window.plot()
multi_window
Total window size: 48 Input indices: [ 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23] Label indices: [24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47] Label column name(s): None
기준
이 작업의 간단한 기준은 필요한 출력 타임스텝 수에 대해 마지막 입력 타임스텝을 반복하는 것입니다.
class MultiStepLastBaseline(tf.keras.Model):
def call(self, inputs):
return tf.tile(inputs[:, -1:, :], [1, OUT_STEPS, 1])
last_baseline = MultiStepLastBaseline()
last_baseline.compile(loss=tf.keras.losses.MeanSquaredError(),
metrics=[tf.keras.metrics.MeanAbsoluteError()])
multi_val_performance = {}
multi_performance = {}
multi_val_performance['Last'] = last_baseline.evaluate(multi_window.val)
multi_performance['Last'] = last_baseline.evaluate(multi_window.test, verbose=0)
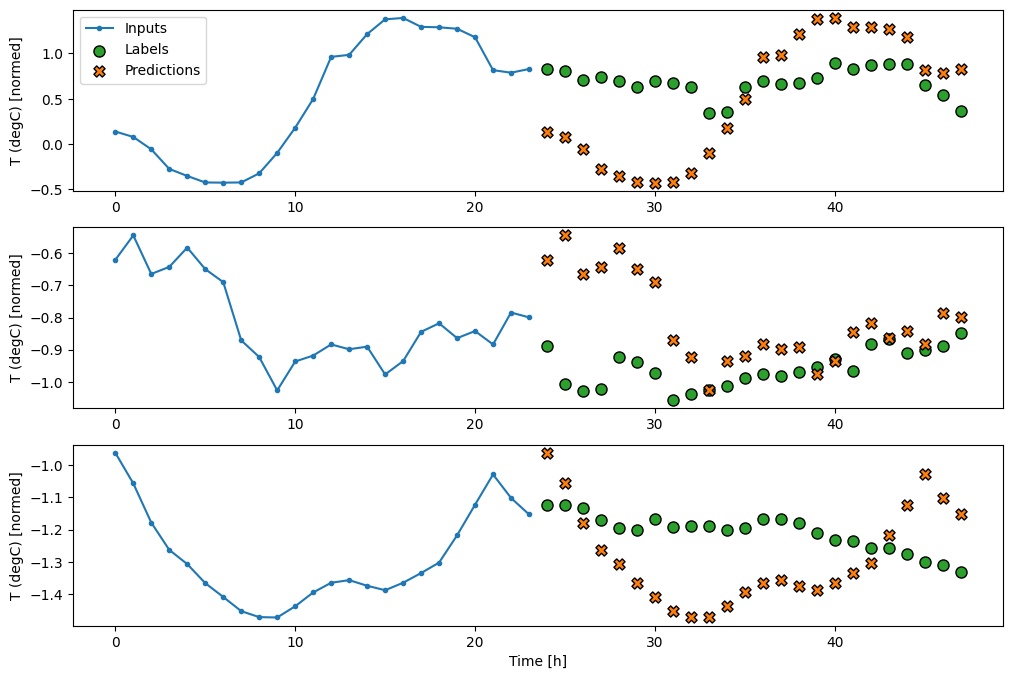
multi_window.plot(last_baseline)
437/437 [==============================] - 1s 2ms/step - loss: 0.6285 - mean_absolute_error: 0.5007
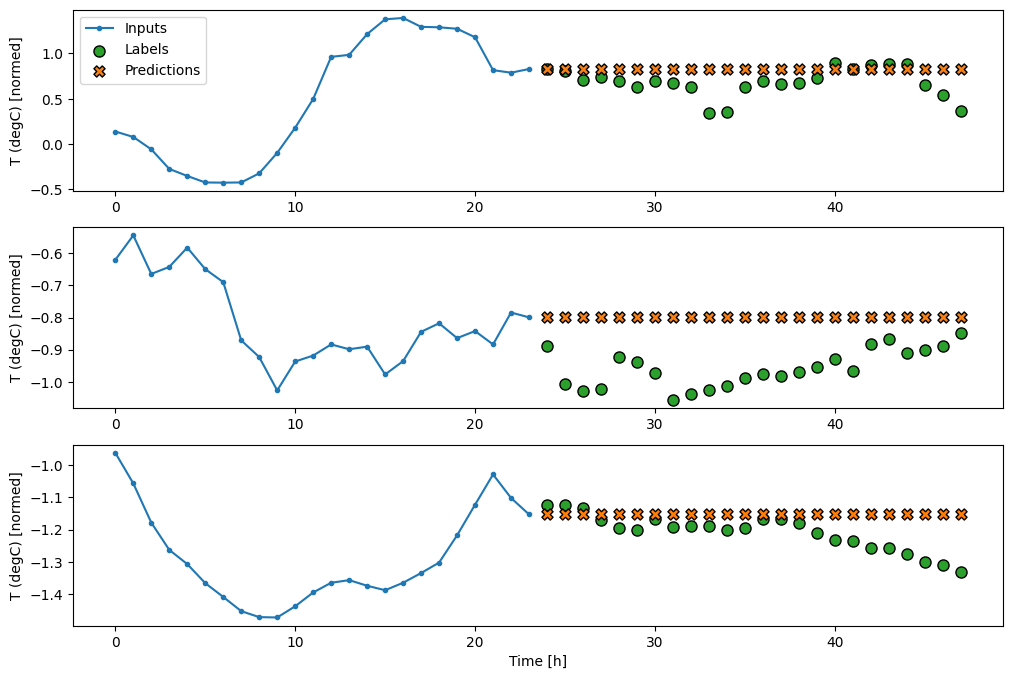
이 작업은 과거의 24시간을 고려하여 미래의 24시간을 예측하는 것이므로 또 다른 간단한 접근법은 내일도 비슷하다는 가정 하에 전날을 반복하는 것입니다.
class RepeatBaseline(tf.keras.Model):
def call(self, inputs):
return inputs
repeat_baseline = RepeatBaseline()
repeat_baseline.compile(loss=tf.keras.losses.MeanSquaredError(),
metrics=[tf.keras.metrics.MeanAbsoluteError()])
multi_val_performance['Repeat'] = repeat_baseline.evaluate(multi_window.val)
multi_performance['Repeat'] = repeat_baseline.evaluate(multi_window.test, verbose=0)
multi_window.plot(repeat_baseline)
437/437 [==============================] - 1s 2ms/step - loss: 0.4270 - mean_absolute_error: 0.3959
싱글샷 모델
이 문제에 대한 한 가지 높은 수준의 접근법은 모델이 한 번에 전체 시퀀스 예측을 수행하는 "싱글샷" 모델을 사용하는 것입니다.
이 모델은 OUT_STEPS*features 출력 단위를 이용한 tf.keras.layers.Dense로 효율적으로 구현할 수 있습니다. 이 모델은 이 출력의 형상을 필요한 (OUTPUT_STEPS, features)로 바꾸기만 하면 됩니다.
선형
마지막 입력 타임스텝을 기반으로 하는 단순한 선형 모델은 기준 모델보다 성능이 더 좋지만 강력하지 못합니다. 이 모델은 선형 프로젝션을 이용해 단일 입력 타임스텝으로부터 OUTPUT_STEPS 타임스텝을 예측해야 합니다. 주로 하루 중 시간과 연중 시간을 기반으로 하는 행동의 저차원 조각만 캡처할 수 있습니다.
multi_linear_model = tf.keras.Sequential([
# Take the last time-step.
# Shape [batch, time, features] => [batch, 1, features]
tf.keras.layers.Lambda(lambda x: x[:, -1:, :]),
# Shape => [batch, 1, out_steps*features]
tf.keras.layers.Dense(OUT_STEPS*num_features,
kernel_initializer=tf.initializers.zeros()),
# Shape => [batch, out_steps, features]
tf.keras.layers.Reshape([OUT_STEPS, num_features])
])
history = compile_and_fit(multi_linear_model, multi_window)
IPython.display.clear_output()
multi_val_performance['Linear'] = multi_linear_model.evaluate(multi_window.val)
multi_performance['Linear'] = multi_linear_model.evaluate(multi_window.test, verbose=0)
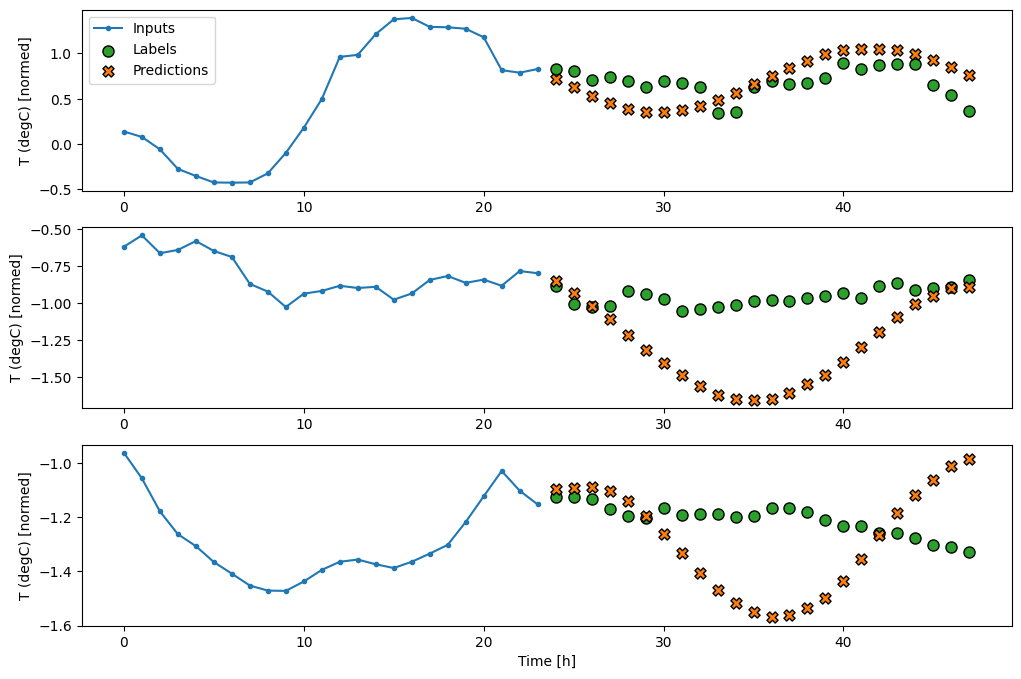
multi_window.plot(multi_linear_model)
437/437 [==============================] - 1s 2ms/step - loss: 0.2552 - mean_absolute_error: 0.3047
밀집
입력과 출력 사이에 tf.keras.layers.Dense를 추가하면 선형 모델이 더 강력해지지만 여전히 단일 입력에 기반합니다.
multi_dense_model = tf.keras.Sequential([
# Take the last time step.
# Shape [batch, time, features] => [batch, 1, features]
tf.keras.layers.Lambda(lambda x: x[:, -1:, :]),
# Shape => [batch, 1, dense_units]
tf.keras.layers.Dense(512, activation='relu'),
# Shape => [batch, out_steps*features]
tf.keras.layers.Dense(OUT_STEPS*num_features,
kernel_initializer=tf.initializers.zeros()),
# Shape => [batch, out_steps, features]
tf.keras.layers.Reshape([OUT_STEPS, num_features])
])
history = compile_and_fit(multi_dense_model, multi_window)
IPython.display.clear_output()
multi_val_performance['Dense'] = multi_dense_model.evaluate(multi_window.val)
multi_performance['Dense'] = multi_dense_model.evaluate(multi_window.test, verbose=0)
multi_window.plot(multi_dense_model)
437/437 [==============================] - 1s 2ms/step - loss: 0.2211 - mean_absolute_error: 0.2833
CNN
컨볼루션 모델은 고정 너비 기록을 기반으로 예측을 수행하므로 시간에 따라 상황이 어떻게 변하는지 볼 수 있어 밀집 모델보다 성능을 높일 수 있습니다.
CONV_WIDTH = 3
multi_conv_model = tf.keras.Sequential([
# Shape [batch, time, features] => [batch, CONV_WIDTH, features]
tf.keras.layers.Lambda(lambda x: x[:, -CONV_WIDTH:, :]),
# Shape => [batch, 1, conv_units]
tf.keras.layers.Conv1D(256, activation='relu', kernel_size=(CONV_WIDTH)),
# Shape => [batch, 1, out_steps*features]
tf.keras.layers.Dense(OUT_STEPS*num_features,
kernel_initializer=tf.initializers.zeros()),
# Shape => [batch, out_steps, features]
tf.keras.layers.Reshape([OUT_STEPS, num_features])
])
history = compile_and_fit(multi_conv_model, multi_window)
IPython.display.clear_output()
multi_val_performance['Conv'] = multi_conv_model.evaluate(multi_window.val)
multi_performance['Conv'] = multi_conv_model.evaluate(multi_window.test, verbose=0)
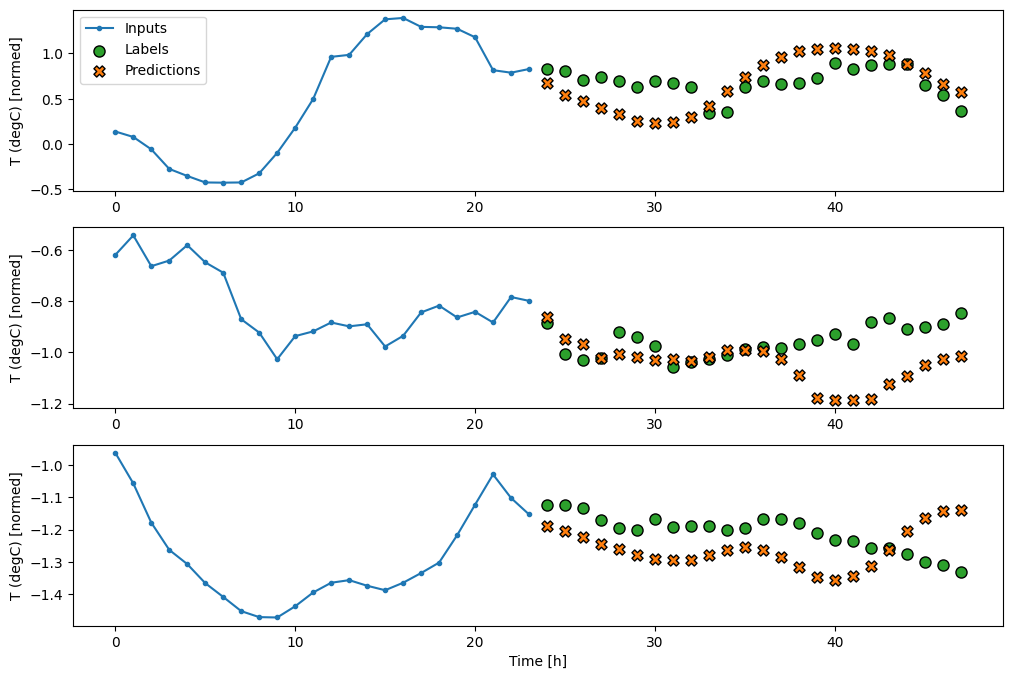
multi_window.plot(multi_conv_model)
437/437 [==============================] - 1s 2ms/step - loss: 0.2134 - mean_absolute_error: 0.2795
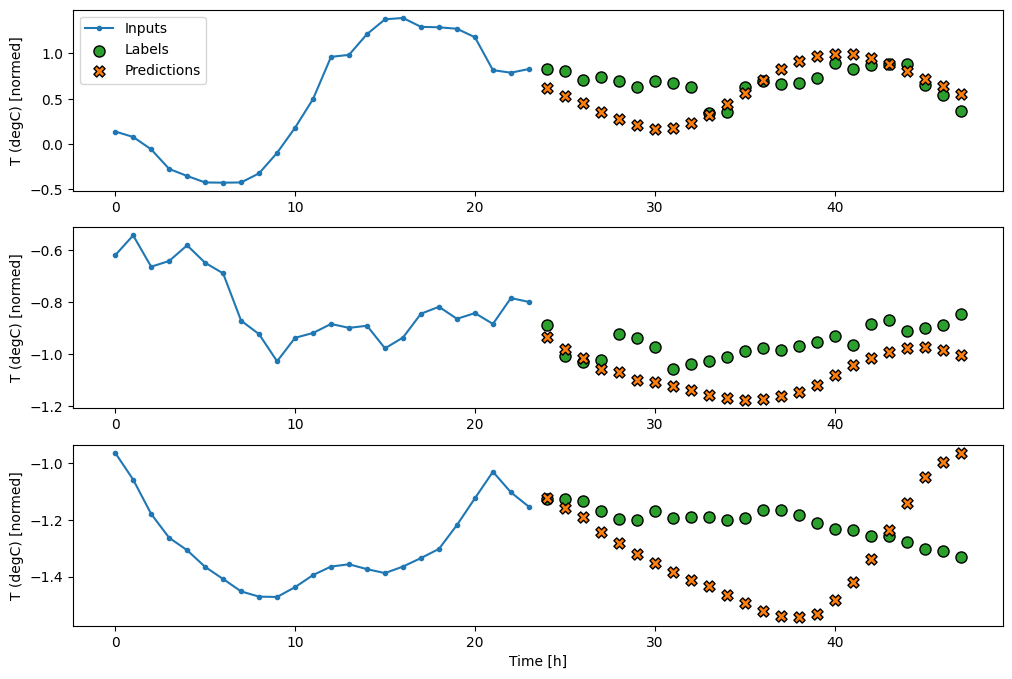
RNN
반복 모델은 모델이 수행하는 예측과 관련이 있는 경우 긴 입력 기록을 사용하는 방법을 학습할 수 있습니다. 여기서 모델은 다음 24시간에 대한 단일 예측을 수행하기 전에 24시간 동안 내부 상태를 축적합니다.
이 싱글샷 형식에서 LSTM은 마지막 타임스텝에서만 출력을 생성하면 되므로 tf.keras.layers.LSTM에서 return_sequences=False를 설정합니다.

multi_lstm_model = tf.keras.Sequential([
# Shape [batch, time, features] => [batch, lstm_units].
# Adding more `lstm_units` just overfits more quickly.
tf.keras.layers.LSTM(32, return_sequences=False),
# Shape => [batch, out_steps*features].
tf.keras.layers.Dense(OUT_STEPS*num_features,
kernel_initializer=tf.initializers.zeros()),
# Shape => [batch, out_steps, features].
tf.keras.layers.Reshape([OUT_STEPS, num_features])
])
history = compile_and_fit(multi_lstm_model, multi_window)
IPython.display.clear_output()
multi_val_performance['LSTM'] = multi_lstm_model.evaluate(multi_window.val)
multi_performance['LSTM'] = multi_lstm_model.evaluate(multi_window.test, verbose=0)
multi_window.plot(multi_lstm_model)
437/437 [==============================] - 1s 3ms/step - loss: 0.2137 - mean_absolute_error: 0.2833
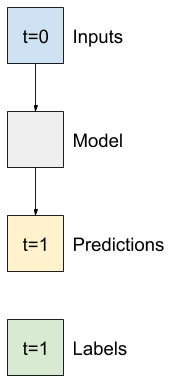
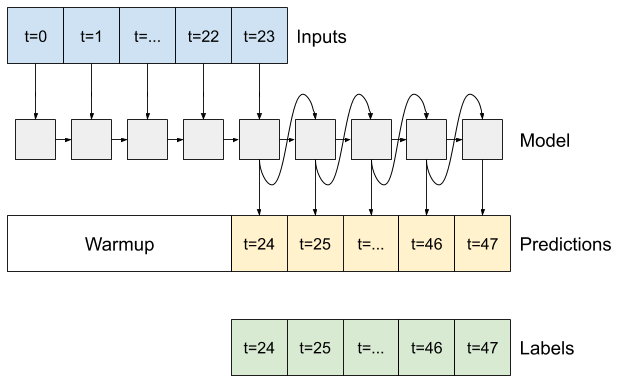
고급: 자기 회귀 모델
위의 모델은 모두 한 번에 전체 출력 시퀀스를 예측합니다.
경우에 따라 모델이 이 예측을 여러 타임스텝으로 분해하는 것이 도움이 될 수 있습니다. 그러면 이전의 RNN(Recurrent Neural Networks)을 이용한 시퀀스 생성에서와 같이 각 모델의 출력을 각 스텝에서 자체 피드백할 수 있어 이전 예측을 조건부로 예측을 수행할 수 있습니다.
이 형태의 모델이 갖는 한 가지 분명한 장점은 다양한 길이의 출력을 생성하도록 설정할 수 있다는 것입니다.
이 튜토리얼의 전반부에서 훈련한 단일 스텝 다중 출력 모델 중 하나를 가져와 자기 회귀 피드백 루프에서 실행할 수 있지만 여기서는 이를 수행하도록 명시적으로 훈련된 모델을 빌드하는 데 중점을 둘 것입니다.
RNN
이 튜토리얼에서는 자기 회귀 RNN 모델만 빌드하지만 이 패턴은 단일 타임스텝을 출력하도록 설계된 모든 모델에 적용할 수 있습니다.
이 모델은 앞의 단일 스텝 LSTM 모델과 기본 형태가 동일하여 tf.keras.layers.LSTM 레이어 다음에 LSTM 레이어 출력을 모델 예측으로 변환하는 tf.keras.layers.Dense 레이어가 이어집니다.
tf.keras.layers.LSTM은 상태와 시퀀스 결과를 자동으로 관리하는 더 높은 수준의 tf.keras.layers.RNN에서 래핑된 tf.keras.layers.LSTMCell입니다(자세한 내용은 Keras를 사용한 순환 신경망(RNN) 가이드 참조).
이 경우 모델은 각 스텝에 대한 입력을 수동으로 관리해야 하므로 더 낮은 수준의 단일 타임스텝 인터페이스에 대해 tf.keras.layers.LSTMCell를 직접 사용합니다.
class FeedBack(tf.keras.Model):
def __init__(self, units, out_steps):
super().__init__()
self.out_steps = out_steps
self.units = units
self.lstm_cell = tf.keras.layers.LSTMCell(units)
# Also wrap the LSTMCell in an RNN to simplify the `warmup` method.
self.lstm_rnn = tf.keras.layers.RNN(self.lstm_cell, return_state=True)
self.dense = tf.keras.layers.Dense(num_features)
feedback_model = FeedBack(units=32, out_steps=OUT_STEPS)
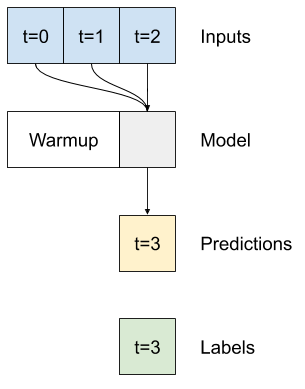
이 모델에 필요한 첫 번째 메서드는 입력을 기반으로 내부 상태를 초기화하는 warmup 메서드입니다. 일단 훈련되면 이 상태는 입력 기록의 관련 부분을 캡처합니다. 이는 앞서 알아본 단일 스탭 LSTM 모델과 동일합니다.
def warmup(self, inputs):
# inputs.shape => (batch, time, features)
# x.shape => (batch, lstm_units)
x, *state = self.lstm_rnn(inputs)
# predictions.shape => (batch, features)
prediction = self.dense(x)
return prediction, state
FeedBack.warmup = warmup
이 메서드는 단일 타임스텝 예측과 LSTM의 내부 상태를 반환합니다.
prediction, state = feedback_model.warmup(multi_window.example[0])
prediction.shape
TensorShape([32, 19])
RNN의 상태 및 초기 예측을 사용하여 이제 이전의 각 스텝에서 수행한 예측을 입력으로 제공하여 모델을 계속 반복할 수 있습니다.
출력 예측을 수집하는 가장 간단한 방법은 Python 목록을 사용하고 루프 후에 tf.stack을 사용하는 것입니다.
참고: 이와 같은 Python 목록 스태킹은 훈련을 위해 Model.compile(..., run_eagerly=True)를 사용하거나 고정 길이의 출력을 통해 즉시 실행하는 경우에만 효과가 있습니다. 동적 출력 길이의 경우 Python 목록 대신 tf.TensorArray를 사용하고 Python range 대신 tf.range를 사용해야 합니다.
def call(self, inputs, training=None):
# Use a TensorArray to capture dynamically unrolled outputs.
predictions = []
# Initialize the LSTM state.
prediction, state = self.warmup(inputs)
# Insert the first prediction.
predictions.append(prediction)
# Run the rest of the prediction steps.
for n in range(1, self.out_steps):
# Use the last prediction as input.
x = prediction
# Execute one lstm step.
x, state = self.lstm_cell(x, states=state,
training=training)
# Convert the lstm output to a prediction.
prediction = self.dense(x)
# Add the prediction to the output.
predictions.append(prediction)
# predictions.shape => (time, batch, features)
predictions = tf.stack(predictions)
# predictions.shape => (batch, time, features)
predictions = tf.transpose(predictions, [1, 0, 2])
return predictions
FeedBack.call = call
예제 입력에서 이 모델을 테스트 실행합니다.
print('Output shape (batch, time, features): ', feedback_model(multi_window.example[0]).shape)
Output shape (batch, time, features): (32, 24, 19)
이제 모델을 훈련합니다.
history = compile_and_fit(feedback_model, multi_window)
IPython.display.clear_output()
multi_val_performance['AR LSTM'] = feedback_model.evaluate(multi_window.val)
multi_performance['AR LSTM'] = feedback_model.evaluate(multi_window.test, verbose=0)
multi_window.plot(feedback_model)
437/437 [==============================] - 3s 7ms/step - loss: 0.2251 - mean_absolute_error: 0.3027
성능
이 문제에 대해 모델 복잡성이 증가함에 따라 분명히 이득이 감소합니다.
x = np.arange(len(multi_performance))
width = 0.3
metric_name = 'mean_absolute_error'
metric_index = lstm_model.metrics_names.index('mean_absolute_error')
val_mae = [v[metric_index] for v in multi_val_performance.values()]
test_mae = [v[metric_index] for v in multi_performance.values()]
plt.bar(x - 0.17, val_mae, width, label='Validation')
plt.bar(x + 0.17, test_mae, width, label='Test')
plt.xticks(ticks=x, labels=multi_performance.keys(),
rotation=45)
plt.ylabel(f'MAE (average over all times and outputs)')
_ = plt.legend()
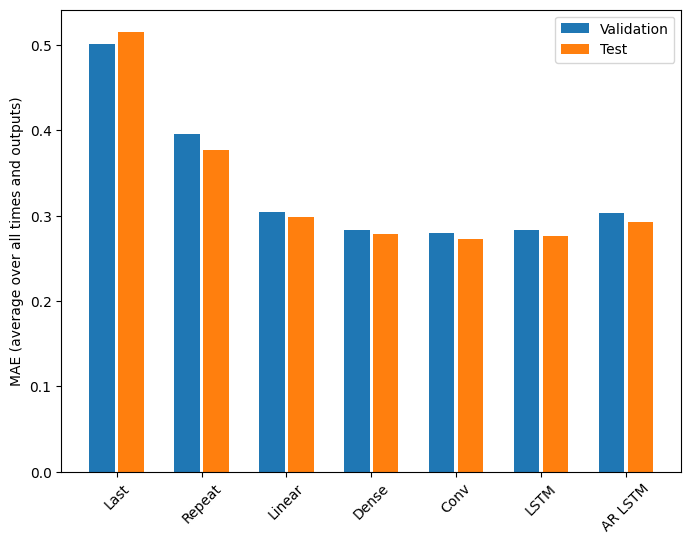
이 튜토리얼의 전반부에서 소개한 다중 출력 모델에 대한 메트릭은 모든 출력 특성에 평균화된 성능을 보여줍니다. 이러한 성능은 유사하지만 출력 타임스텝에 걸쳐서도 평균화됩니다.
for name, value in multi_performance.items():
print(f'{name:8s}: {value[1]:0.4f}')
Last : 0.5157 Repeat : 0.3774 Linear : 0.2981 Dense : 0.2784 Conv : 0.2726 LSTM : 0.2759 AR LSTM : 0.2920
밀집 모델에서 컨볼루션 및 반복 모델로 이동하여 얻은 이득은 몇 퍼센트(있다고 하더라도)에 불과하며 자기 회귀 모델의 성능은 분명히 더 나빴습니다. 따라서 이러한 더 복잡한 접근 방법은 이 문제에서는 가치가 없을 수도 있지만 시도해 보기 전에는 알 수 있는 방법이 없었으며 이러한 모델은 다른 특정 문제에 도움이 될 수 있습니다.
다음 단계
이 튜토리얼에서는 TensorFlow를 사용한 시계열 예측에 대해 간단히 소개했습니다.
자세한 내용은 다음을 참조하세요.
- Scikit-Learn, Keras 및 TensorFlow를 이용한 머신러닝 실무(2차 개정 버전), 챕터 15
- Python을 이용한 딥러닝 챕터 6
- Udacity의 딥러닝을 위한 TensorFlow 소개(연습 노트북 포함)의 레슨 8.
또한 TensorFlow에서 어떤 클래식 시계열 모델이든 구현할 수 있다는 점을 기억하세요. 이 튜토리얼에서는 TensdorFlow의 내장 기능에 초점을 맞추었습니다.