
- विवरण :
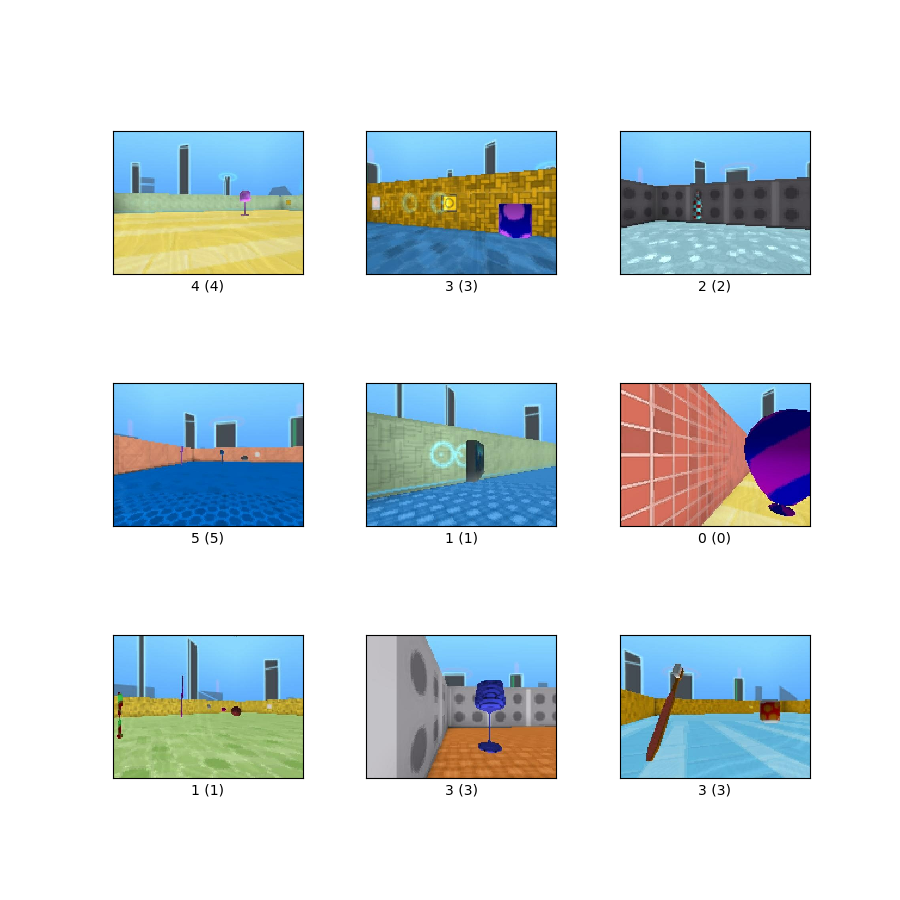
डीएमलैब डेटासेट में डीपमाइंड लैब वातावरण में कार्य करने वाले एजेंट द्वारा देखे गए फ़्रेम शामिल हैं, जिन्हें एजेंट और पर्यावरण में मौजूद विभिन्न वस्तुओं के बीच की दूरी द्वारा एनोटेट किया जाता है। लक्ष्य 3डी वातावरण में दृश्य इनपुट से दूरी के बारे में तर्क करने के लिए दृश्य मॉडल की क्षमता का मूल्यांकन करना है। डीएमलैब डेटासेट में 6 वर्गों में 360x480 रंगीन छवियां हैं। कक्षाएं क्रमशः {करीब, दूर, बहुत दूर} x {सकारात्मक इनाम, नकारात्मक इनाम} हैं।
मुखपृष्ठ : https://github.com/google-research/task_adaptation
स्रोत कोड :
tfds.image_classification.Dmlabसंस्करण :
-
2.0.1(डिफ़ॉल्ट): कोई रिलीज़ नोट नहीं।
-
डाउनलोड आकार :
2.81 GiBडेटासेट का आकार :
3.13 GiBऑटो-कैश्ड ( दस्तावेज़ीकरण ): नहीं
विभाजन :
| विभाजित करना | उदाहरण |
|---|---|
'test' | 22,735 |
'train' | 65,550 |
'validation' | 22,628 |
- फ़ीचर संरचना :
FeaturesDict({
'filename': Text(shape=(), dtype=string),
'image': Image(shape=(360, 480, 3), dtype=uint8),
'label': ClassLabel(shape=(), dtype=int64, num_classes=6),
})
- फ़ीचर दस्तावेज़ीकरण :
| विशेषता | कक्षा | आकार | डीप्रकार | विवरण |
|---|---|---|---|---|
| फीचर्सडिक्ट | ||||
| फ़ाइल का नाम | मूलपाठ | डोरी | ||
| छवि | छवि | (360, 480, 3) | uint8 | |
| लेबल | क्लास लेबल | int64 |
पर्यवेक्षित कुंजियाँ (
as_superviseddoc देखें):('image', 'label')चित्र ( tfds.show_examples ):
- उदाहरण ( tfds.as_dataframe ):
- उद्धरण :
@article{zhai2019visual,
title={The Visual Task Adaptation Benchmark},
author={Xiaohua Zhai and Joan Puigcerver and Alexander Kolesnikov and
Pierre Ruyssen and Carlos Riquelme and Mario Lucic and
Josip Djolonga and Andre Susano Pinto and Maxim Neumann and
Alexey Dosovitskiy and Lucas Beyer and Olivier Bachem and
Michael Tschannen and Marcin Michalski and Olivier Bousquet and
Sylvain Gelly and Neil Houlsby},
year={2019},
eprint={1910.04867},
archivePrefix={arXiv},
primaryClass={cs.CV},
url = {https://arxiv.org/abs/1910.04867}
}