
- বর্ণনা :
এটি একটি ভঙ্গি অনুমান ডেটাসেট, যেখানে সিমেট্রিক 3D আকৃতি রয়েছে যেখানে একাধিক অভিযোজন দৃশ্যতভাবে আলাদা করা যায় না। চ্যালেঞ্জ হল সমস্ত সমতুল্য অভিযোজনের ভবিষ্যদ্বাণী করা যখন প্রশিক্ষণের সময় প্রতিটি চিত্রের সাথে শুধুমাত্র একটি অভিযোজন যুক্ত করা হয় (যেমন বেশিরভাগ পোজ অনুমান ডেটাসেটের দৃশ্য)। বেশিরভাগ পোজ অনুমান ডেটাসেটের বিপরীতে, সমতুল্য অভিযোজনের সম্পূর্ণ সেট মূল্যায়নের জন্য উপলব্ধ।
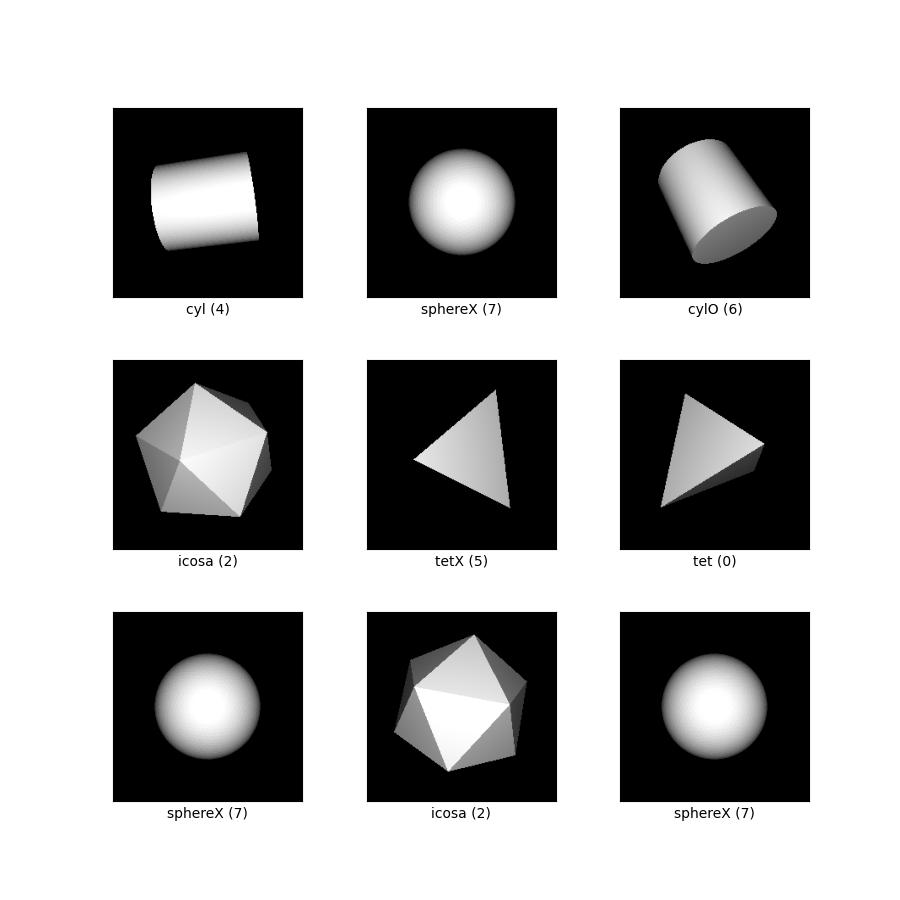
মোট আটটি আকার রয়েছে, প্রতিটি 50,000 দৃষ্টিকোণ থেকে রেন্ডার করা হয়েছে 3D ঘূর্ণনের সম্পূর্ণ স্থানের উপর এলোমেলোভাবে বিতরণ করা হয়েছে। পাঁচটি আকৃতি বৈশিষ্ট্যহীন -- টেট্রাহেড্রন, কিউব, আইকোসাহেড্রন, শঙ্কু এবং সিলিন্ডার। এর মধ্যে, তিনটি প্লেটোনিক কঠিন পদার্থ (টেট্রাহেড্রন, কিউব, আইকোসাহেড্রন) যথাক্রমে তাদের 12-, 24- এবং 60-গুণ বিযুক্ত প্রতিসাম্য সহ টীকাযুক্ত। শঙ্কু এবং সিলিন্ডার 1 ডিগ্রী ব্যবধানে তাদের অবিচ্ছিন্ন প্রতিসাম্যের সাথে টীকা করা হয়। এই প্রতিসাম্য মূল্যায়নের জন্য প্রদান করা হয়; উদ্দেশ্য তত্ত্বাবধান প্রতিটি ইমেজ সঙ্গে শুধুমাত্র একটি একক ঘূর্ণন.
অবশিষ্ট তিনটি আকার একটি বিশিষ্ট বৈশিষ্ট্য দ্বারা চিহ্নিত করা হয়. একটি লাল রঙের মুখের একটি টেট্রাহেড্রন, একটি অফ-সেন্টার ডট সহ একটি সিলিন্ডার এবং একটি বিন্দু দ্বারা আবৃত একটি গোলক রয়েছে। পার্থক্যকারী বৈশিষ্ট্যটি দৃশ্যমান হোক বা না হোক, সম্ভাব্য অভিযোজনের স্থান হ্রাস করা হয়েছে। আমরা এই আকারগুলির জন্য সমতুল্য ঘূর্ণনের সেট প্রদান করি না।
প্রতিটি উদাহরণ রয়েছে
- 224x224 RGB চিত্র
একটি আকৃতি সূচক যাতে ডেটাসেট আকৃতি দ্বারা ফিল্টার করা যেতে পারে।
সূচকগুলি এর সাথে মিলে যায়:- 0 = টেট্রাহেড্রন
- 1 = ঘনক
- 2 = আইকোসাহেড্রন
- 3 = শঙ্কু
- 4 = সিলিন্ডার
- 5 = চিহ্নিত টেট্রাহেড্রন
- 6 = চিহ্নিত সিলিন্ডার
- 7 = চিহ্নিত গোলক
রেন্ডারিং প্রক্রিয়ায় ব্যবহৃত ঘূর্ণন, একটি 3x3 ঘূর্ণন ম্যাট্রিক্স হিসাবে উপস্থাপিত
মূল্যায়নের জন্য প্রতিসাম্যের অধীনে পরিচিত সমতুল্য ঘূর্ণনের সেট।
তিনটি চিহ্নিত আকারের ক্ষেত্রে, এটি শুধুমাত্র রেন্ডারিং ঘূর্ণন।
অতিরিক্ত ডকুমেন্টেশন : কোড সহ কাগজপত্রে অন্বেষণ করুন
হোমপেজ : https://implicit-pdf.github.io
উত্স কোড :
tfds.datasets.symmetric_solids.Builderসংস্করণ :
-
1.0.0(ডিফল্ট): প্রাথমিক প্রকাশ।
-
ডাউনলোড আকার :
3.10 GiBডেটাসেটের আকার :
3.94 GiBস্বয়ংক্রিয় ক্যাশে ( ডকুমেন্টেশন ): না
বিভাজন :
| বিভক্ত | উদাহরণ |
|---|---|
'test' | 40,000 |
'train' | 360,000 |
- বৈশিষ্ট্য গঠন :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- বৈশিষ্ট্য ডকুমেন্টেশন :
| বৈশিষ্ট্য | ক্লাস | আকৃতি | ডিটাইপ | বর্ণনা |
|---|---|---|---|---|
| ফিচারসডিক্ট | ||||
| ইমেজ | ছবি | (224, 224, 3) | uint8 | |
| লেবেল_আকৃতি | ক্লাসলেবেল | int64 | ||
| ঘূর্ণন | টেনসর | (৩, ৩) | float32 | |
| ঘূর্ণন_সমতুল্য | টেনসর | (কোনটি নয়, 3, 3) | float32 |
তত্ত্বাবধান করা কী (দেখুন
as_superviseddoc ):('image', 'rotation')চিত্র ( tfds.show_examples ):
- উদাহরণ ( tfds.as_dataframe ):
- উদ্ধৃতি :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}