
- Описание :
Это набор данных для оценки позы, состоящий из симметричных трехмерных фигур, в которых несколько ориентаций визуально неразличимы. Задача состоит в том, чтобы предсказать все эквивалентные ориентации, когда только одна ориентация сочетается с каждым изображением во время обучения (как это происходит для большинства наборов данных оценки позы). В отличие от большинства наборов данных для оценки позы, для оценки доступен полный набор эквивалентных ориентаций.
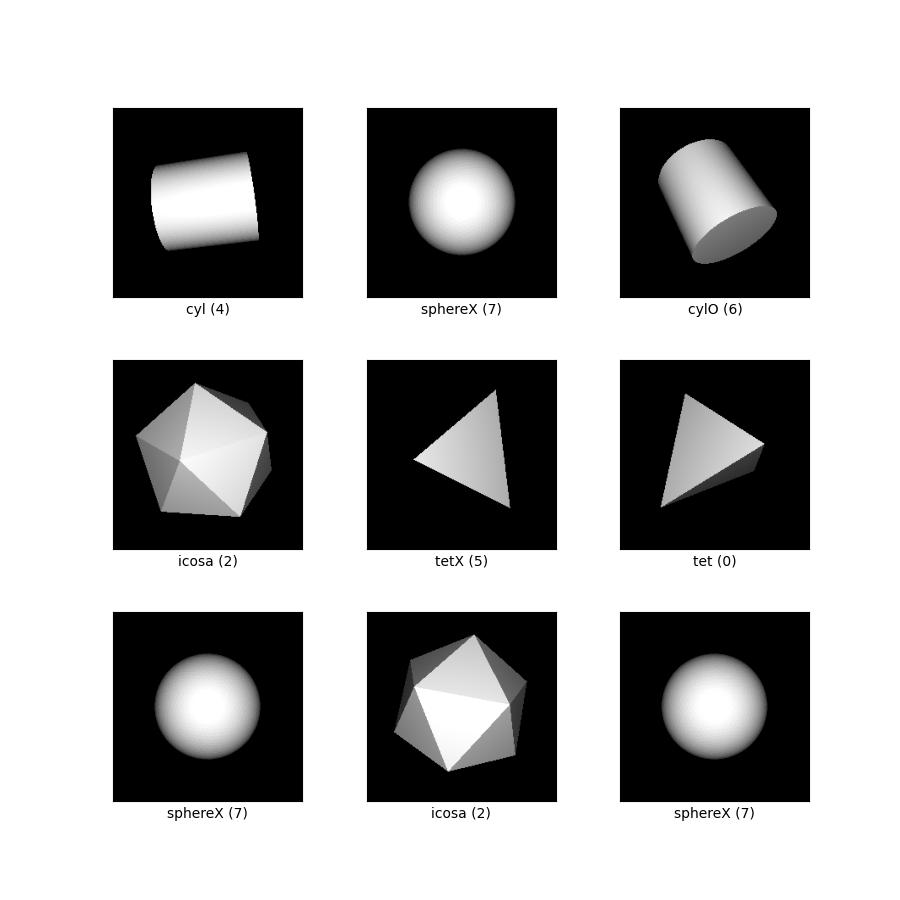
Всего имеется восемь фигур, каждая из которых визуализируется с 50 000 точек обзора, равномерно распределенных случайным образом по всему пространству трехмерных вращений. Пять форм лишены каких-либо признаков: тетраэдр, куб, икосаэдр, конус и цилиндр. Из них три Платоновых тела (тетраэдр, куб, икосаэдр) отмечены их 12-, 24- и 60-кратной дискретной симметрией соответственно. Конус и цилиндр отмечены их непрерывными симметриями, дискретизированными с интервалом в 1 градус. Эти симметрии предоставляются для оценки; предполагаемое наблюдение - это только одно вращение с каждым изображением.
Остальные три формы отмечены отличительным признаком. Есть тетраэдр с одной красной гранью, цилиндр со смещенной от центра точкой и сфера с буквой X, увенчанной точкой. Независимо от того, виден ли отличительный признак, пространство возможных ориентаций сокращается. Мы не предоставляем набор эквивалентных поворотов для этих фигур.
Каждый пример содержит
- RGB-изображение 224x224
индекс формы, чтобы набор данных можно было отфильтровать по форме.
Индексы соответствуют:- 0 = тетраэдр
- 1 = куб
- 2 = икосаэдр
- 3 = конус
- 4 = цилиндр
- 5 = отмеченный тетраэдр
- 6 = отмеченный цилиндр
- 7 = отмеченная сфера
вращение, используемое в процессе рендеринга, представленное в виде матрицы вращения 3x3
набор известных эквивалентных вращений при симметрии для оценки.
В случае с тремя отмеченными фигурами это только вращение рендеринга.
Дополнительная документация : изучить документы с кодом
Домашняя страница : https://implicit-pdf.github.io
Исходный код :
tfds.datasets.symmetric_solids.BuilderВерсии :
-
1.0.0(по умолчанию): Первоначальный выпуск.
-
Размер загрузки :
3.10 GiBРазмер набора данных :
3.94 GiBАвтоматическое кэширование ( документация ): Нет
Сплиты :
| Расколоть | Примеры |
|---|---|
'test' | 40 000 |
'train' | 360 000 |
- Структура функции :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- Документация по функциям :
| Особенность | Учебный класс | Форма | Dтип | Описание |
|---|---|---|---|---|
| ОсобенностиDict | ||||
| изображение | Изображение | (224, 224, 3) | uint8 | |
| label_shape | Метка класса | int64 | ||
| вращение | Тензор | (3, 3) | поплавок32 | |
| вращений_эквивалент | Тензор | (Нет, 3, 3) | поплавок32 |
Контролируемые ключи (см.
as_superviseddoc ):('image', 'rotation')Рисунок ( tfds.show_examples ):
- Примеры ( tfds.as_dataframe ):
- Цитата :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}