
- الوصف :
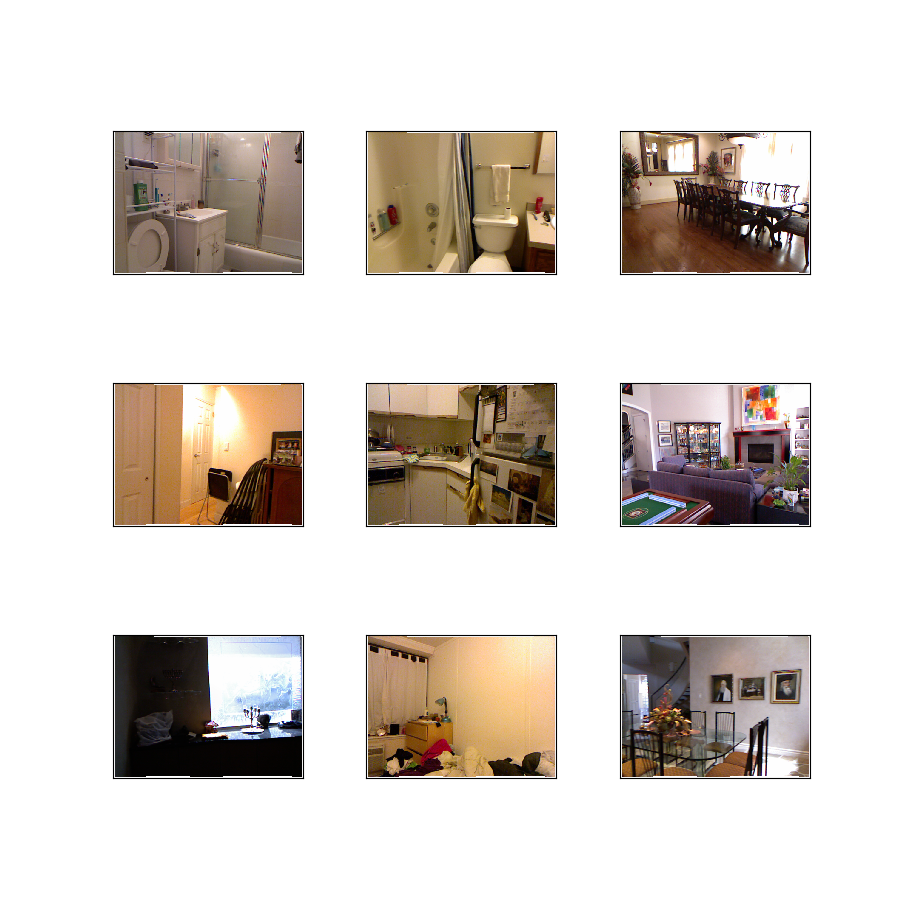
تتكون مجموعة بيانات NYU-Depth V2 من تسلسلات فيديو من مجموعة متنوعة من المشاهد الداخلية كما تم تسجيلها بواسطة كل من كاميرات RGB و Depth من Microsoft Kinect.
وثائق إضافية : استكشف في الأوراق باستخدام الرمز
الصفحة الرئيسية : https://cs.nyu.edu/~silberman/datasets/nyu_depth_v2.html
كود المصدر :
tfds.datasets.nyu_depth_v2.Builderإصدارات :
-
0.0.1(افتراضي): لا توجد ملاحظات حول الإصدار.
-
حجم التحميل :
31.92 GiBحجم مجموعة البيانات :
74.03 GiBالتخزين المؤقت التلقائي ( التوثيق ): لا
الانقسامات :
| انشق، مزق | أمثلة |
|---|---|
'train' | 47،584 |
'validation' | 654 |
- هيكل الميزة :
FeaturesDict({
'depth': Tensor(shape=(480, 640), dtype=float16),
'image': Image(shape=(480, 640, 3), dtype=uint8),
})
- وثائق الميزة :
| ميزة | فصل | شكل | نوع | وصف |
|---|---|---|---|---|
| الميزات | ||||
| عمق | موتر | (480 ، 640) | تعويم 16 | |
| صورة | صورة | (480 ، 640 ، 3) | uint8 |
المفاتيح الخاضعة للإشراف (انظر المستند
as_supervised):('image', 'depth')الشكل ( tfds.show_examples ):
- أمثلة ( tfds.as_dataframe ):
- الاقتباس :
@inproceedings{Silberman:ECCV12,
author = {Nathan Silberman, Derek Hoiem, Pushmeet Kohli and Rob Fergus},
title = {Indoor Segmentation and Support Inference from RGBD Images},
booktitle = {ECCV},
year = {2012}
}
@inproceedings{icra_2019_fastdepth,
author = {Wofk, Diana and Ma, Fangchang and Yang, Tien-Ju and Karaman, Sertac and Sze, Vivienne},
title = {FastDepth: Fast Monocular Depth Estimation on Embedded Systems},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
year = {2019}
}