
- תיאור :
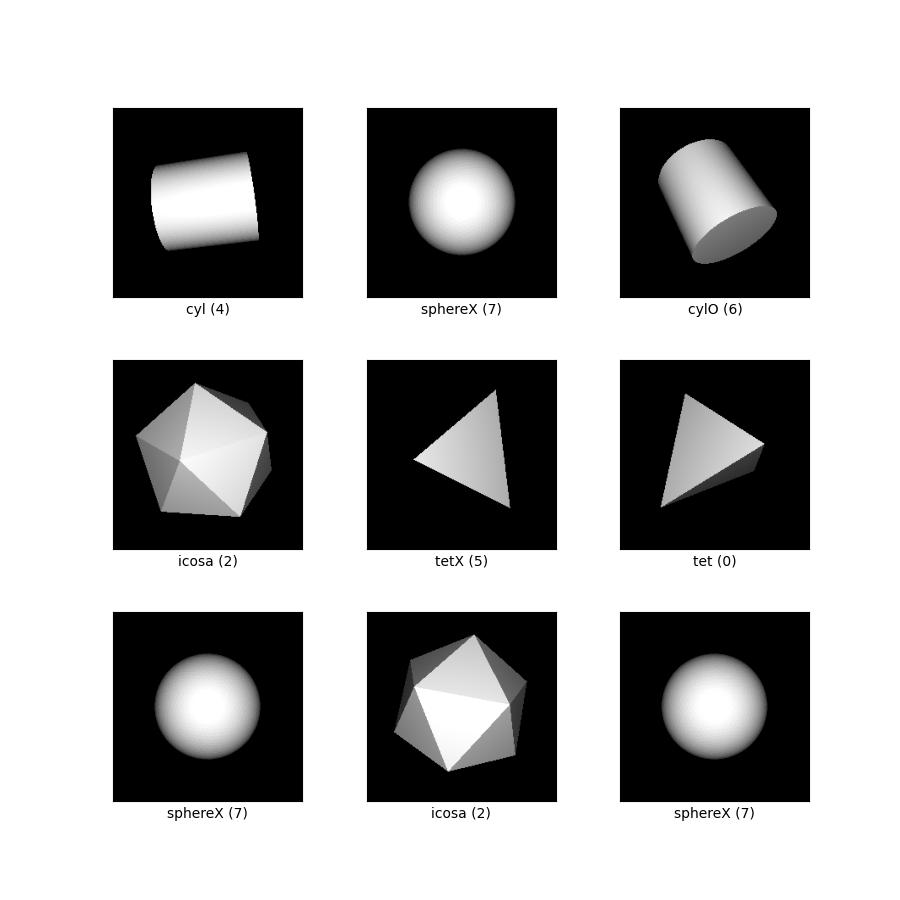
זהו מערך נתונים להערכת תנוחה, המורכב מצורות תלת-ממד סימטריות שבהן אין להבחין ויזואלית במספר כיוונים. האתגר הוא לחזות את כל הכיוונים המקבילים כאשר רק כיוון אחד משויך לכל תמונה במהלך האימון (כמו התרחיש עבור רוב מערכי הערכת הפוזה). בניגוד לרוב מערכי הערכת הפוזה, הסט המלא של הכיוונים המקבילים זמין להערכה.
ישנן שמונה צורות בסך הכל, כל אחת מעובדת מ-50,000 נקודות מבט המופצות באופן אחיד באקראי על פני המרחב המלא של סיבובי תלת-ממד. חמש מהצורות הן חסרות תכונה - טטרהדרון, קובייה, איקוסהדרון, חרוט וגליל. מתוכם, שלושת המוצקים האפלטוניים (טטרהדרון, קובייה, איקוסהדרון) מסומנים בסימטריות הבדידות של פי 12, 24 ו-60, בהתאמה. החרוט והגליל מסומנים עם סימטריות רציפות שלהם בדיסקרטיות במרווחים של מעלה אחת. סימטריות אלה ניתנות להערכה; הפיקוח המיועד הוא רק סיבוב בודד עם כל תמונה.
שלוש הצורות הנותרות מסומנות בתכונה מבדלת. יש טטרהדרון עם פנים אחד בצבע אדום, גליל עם נקודה לא במרכז, וכדור עם איקס שמכוסה בנקודה. בין אם המאפיין המבחין גלוי ובין אם לאו, מרחב הכיוונים האפשריים מצטמצם. איננו מספקים את קבוצת הסיבובים המקבילים עבור צורות אלה.
כל דוגמה מכילה של
- תמונת RGB בגודל 224x224
אינדקס צורה כך שניתן יהיה לסנן את מערך הנתונים לפי צורה.
המדדים מתאימים ל:- 0 = טטרהדרון
- 1 = קובייה
- 2 = איקוסהדרון
- 3 = קונוס
- 4 = צילינדר
- 5 = טטרהדרון מסומן
- 6 = גליל מסומן
- 7 = כדור מסומן
הסיבוב המשמש בתהליך העיבוד, המיוצג כמטריצת סיבוב 3x3
קבוצת הסיבובים המקבילים הידועים בסימטריה, לצורך הערכה.
במקרה של שלוש הצורות המסומנות, זהו רק סיבוב העיבוד.
תיעוד נוסף : חקור על ניירות עם קוד
דף הבית : https://implicit-pdf.github.io
קוד מקור :
tfds.datasets.symmetric_solids.Builderגרסאות :
-
1.0.0(ברירת מחדל): שחרור ראשוני.
-
גודל הורדה :
3.10 GiBגודל ערכת נתונים :
3.94 GiBשמירה אוטומטית במטמון ( תיעוד ): לא
פיצולים :
| לְפַצֵל | דוגמאות |
|---|---|
'test' | 40,000 |
'train' | 360,000 |
- מבנה תכונה :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- תיעוד תכונה :
| תכונה | מעמד | צוּרָה | Dtype | תיאור |
|---|---|---|---|---|
| FeaturesDict | ||||
| תמונה | תמונה | (224, 224, 3) | uint8 | |
| label_shape | ClassLabel | int64 | ||
| רוֹטַציָה | מוֹתֵחַ | (3, 3) | לצוף32 | |
| סיבובים_שווים | מוֹתֵחַ | (אין, 3, 3) | לצוף32 |
מפתחות בפיקוח (ראה
as_superviseddoc ):('image', 'rotation')איור ( tfds.show_examples ):
- דוגמאות ( tfds.as_dataframe ):
- ציטוט :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}