
- Açıklama :
Bu, birden çok yönün görsel olarak ayırt edilemediği simetrik 3B şekillerden oluşan bir poz tahmin veri kümesidir. Zorluk, eğitim sırasında her görüntüyle yalnızca bir yön eşleştirildiğinde tüm eşdeğer yönelimleri tahmin etmektir (çoğu poz tahmin veri kümesi için senaryoda olduğu gibi). Çoğu poz tahmini veri setinin aksine, eşdeğer yönelimlerin tam seti değerlendirme için mevcuttur.
Toplam sekiz şekil vardır ve her biri, 3B döndürmelerin tüm alanı üzerinde tek tip olarak rastgele dağıtılmış 50.000 bakış açısından oluşturulmuştur. Şekillerin beşi özelliksizdir - tetrahedron, küp, icosahedron, koni ve silindir. Bunlardan üç Platonik katı (tetrahedron, küp, icosahedron) sırasıyla 12-, 24- ve 60-kat ayrık simetrileriyle açıklanmıştır. Koni ve silindir, 1 derecelik aralıklarla ayrıklaştırılmış sürekli simetrileri ile açıklanmıştır. Bu simetriler değerlendirme için sağlanmıştır; amaçlanan denetim, her görüntüyle yalnızca tek bir dönüştür.
Kalan üç şekil ayırt edici bir özellikle işaretlenmiştir. Bir yüzü kırmızı renkli bir tetrahedron, merkezi olmayan bir nokta olan bir silindir ve bir nokta tarafından kapatılmış bir X'e sahip bir küre vardır. Ayırt edici özellik görünse de görünmese de olası yönelimlerin alanı küçülür. Bu şekiller için eşdeğer dönüşler seti sağlamıyoruz.
Her örnek şunları içerir:
- 224x224 RGB görüntü
veri kümesinin şekle göre filtrelenebilmesi için bir şekil dizini.
Endeksler şunlara karşılık gelir:- 0 = dörtyüzlü
- 1 = küp
- 2 = ikosahedron
- 3 = koni
- 4 = silindir
- 5 = işaretli dörtyüzlü
- 6 = işaretli silindir
- 7 = işaretli küre
işleme sürecinde kullanılan döndürme, 3x3 döndürme matrisi olarak temsil edilir
değerlendirme için simetri altında bilinen eşdeğer dönüşler kümesi.
Üç işaretli şekil söz konusu olduğunda, bu yalnızca oluşturma dönüşüdür.
Ek Belgeler : Belgeleri Keşfedin
Ana Sayfa : https://implicit-pdf.github.io
Kaynak kodu :
tfds.datasets.symmetric_solids.Buildersürümler :
-
1.0.0(varsayılan): İlk sürüm.
-
İndirme boyutu :
3.10 GiBVeri kümesi boyutu :
3.94 GiBOtomatik önbelleğe alınmış ( belgeleme ): Hayır
bölmeler :
| Bölmek | örnekler |
|---|---|
'test' | 40.000 |
'train' | 360.000 |
- Özellik yapısı :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- Özellik belgeleri :
| Özellik | Sınıf | Şekil | Dtipi | Tanım |
|---|---|---|---|---|
| ÖzelliklerDict | ||||
| resim | resim | (224, 224, 3) | uint8 | |
| etiket_şekli | SınıfEtiketi | int64 | ||
| rotasyon | tensör | (3, 3) | şamandıra32 | |
| rotasyonlar_eşdeğeri | tensör | (Yok, 3, 3) | şamandıra32 |
Denetlenen tuşlar (Bkz
as_superviseddoc ):('image', 'rotation')Şekil ( tfds.show_examples ):
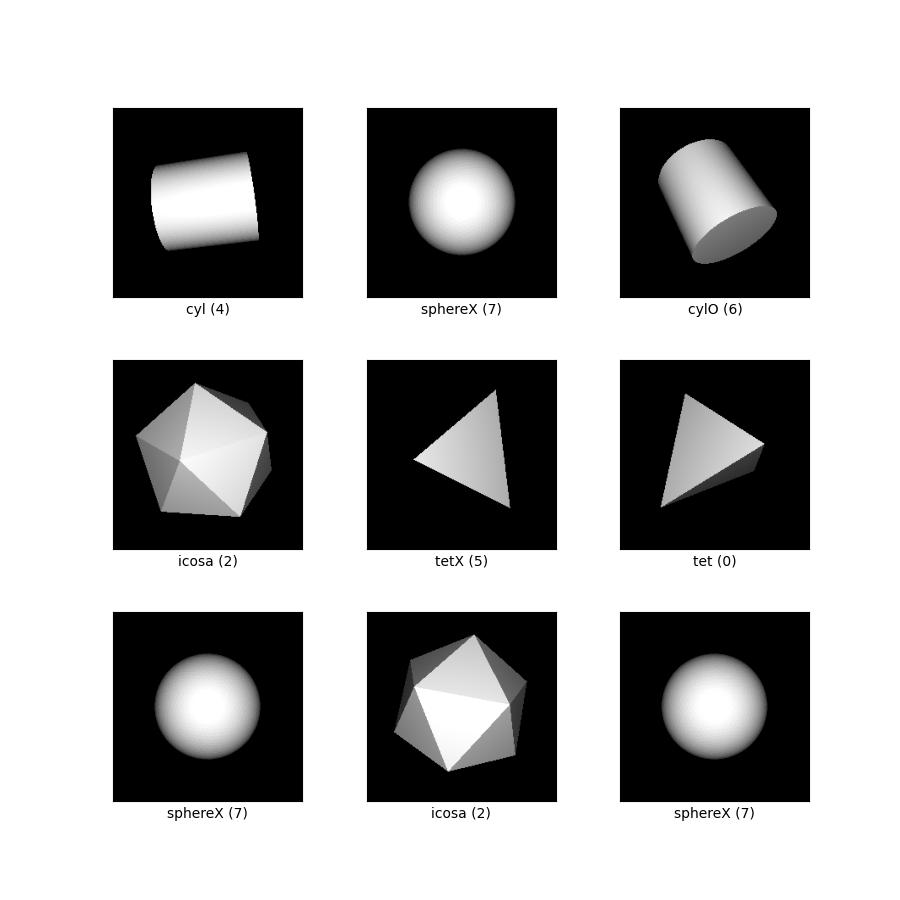
- Örnekler ( tfds.as_dataframe ):
- Alıntı :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}