
- คำอธิบาย :
นี่คือชุดข้อมูลการประมาณท่าทางซึ่งประกอบด้วยรูปทรง 3 มิติที่สมมาตรซึ่งการวางแนวหลายทิศทางจะแยกไม่ออกด้วยสายตา ความท้าทายคือการคาดการณ์การวางแนวที่เท่ากันทั้งหมด เมื่อจับคู่การวางแนวเดียวกับแต่ละภาพระหว่างการฝึก (เช่นเดียวกับสถานการณ์สำหรับชุดข้อมูลการประมาณท่าทางส่วนใหญ่) ตรงกันข้ามกับชุดข้อมูลการประมาณค่าท่าทางส่วนใหญ่ ชุดของการวางแนวที่เทียบเท่ามีให้สำหรับการประเมิน
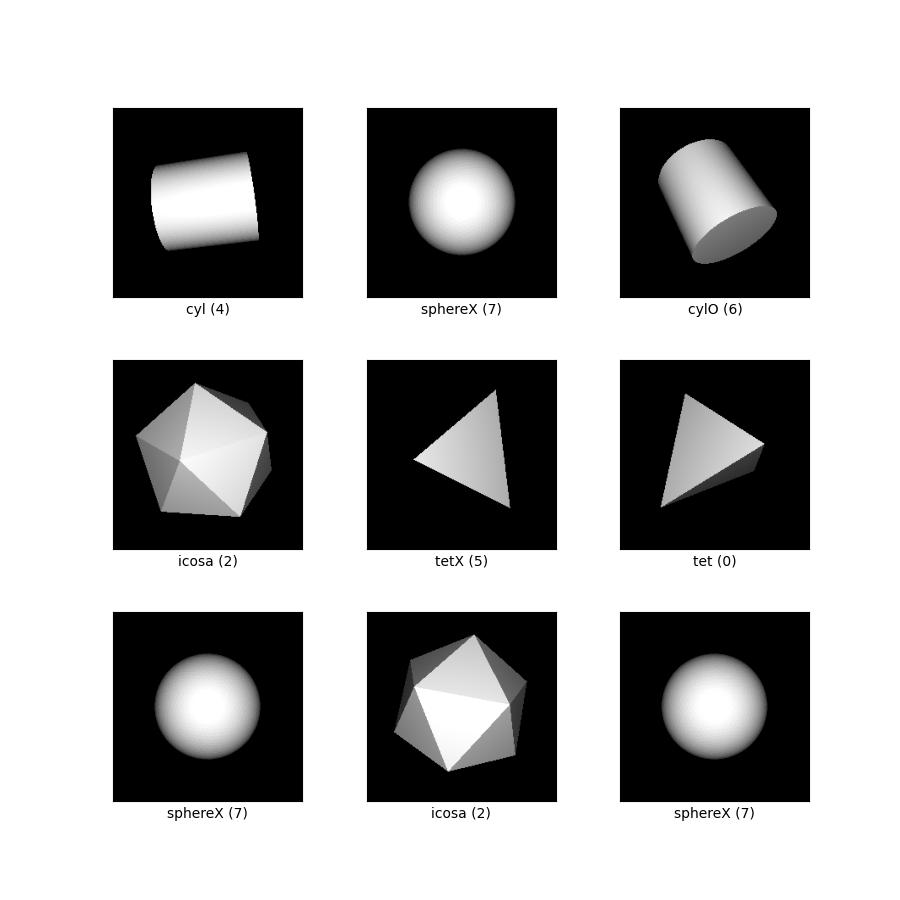
มีรูปร่างทั้งหมดแปดรูปร่าง แต่ละรูปร่างแสดงผลจากมุมมอง 50,000 จุด กระจายอย่างสม่ำเสมอโดยสุ่มบนพื้นที่เต็มของการหมุน 3 มิติ ห้ารูปทรงที่ไม่มีคุณลักษณะ ได้แก่ จัตุรมุข ลูกบาศก์ icosahedron กรวย และทรงกระบอก ในจำนวนนั้น ของแข็งพลาโทนิกทั้งสาม (tetrahedron, cube, icosahedron) ได้รับคำอธิบายประกอบด้วยความสมมาตรแบบไม่ต่อเนื่อง 12-, 24- และ 60 เท่าตามลำดับ กรวยและทรงกระบอกได้รับการอธิบายประกอบโดยมีความสมมาตรต่อเนื่องโดยแยกเป็นช่วงๆ ละ 1 องศา ความสมมาตรเหล่านี้มีไว้สำหรับการประเมิน การควบคุมที่ตั้งใจไว้คือการหมุนเพียงครั้งเดียวกับแต่ละภาพ
รูปทรงที่เหลืออีกสามรูปทรงมีเครื่องหมายแสดงลักษณะเฉพาะ มีรูปทรงจัตุรมุขที่มีหน้าสีแดงด้านหนึ่ง ทรงกระบอกที่มีจุดอยู่นอกศูนย์กลาง และทรงกลมที่มี X ล้อมรอบด้วยจุด ไม่ว่าจะมองเห็นลักษณะเด่นหรือไม่ก็ตาม พื้นที่ของการวางแนวที่เป็นไปได้จะลดลง เราไม่มีชุดของการหมุนที่เท่ากันสำหรับรูปร่างเหล่านี้
แต่ละตัวอย่างประกอบด้วย
- ภาพ 224x224 RGB
ดัชนีรูปร่างเพื่อให้ชุดข้อมูลอาจถูกกรองตามรูปร่าง
ดัชนีสอดคล้องกับ:- 0 = จัตุรมุข
- 1 = ลูกบาศก์
- 2 = icosahedron
- 3 = กรวย
- 4 = กระบอกสูบ
- 5 = จัตุรมุขที่มีเครื่องหมาย
- 6 = ทรงกระบอกที่ทำเครื่องหมายไว้
- 7 = ทรงกลมที่ทำเครื่องหมายไว้
การหมุนที่ใช้ในกระบวนการเรนเดอร์ ซึ่งแสดงเป็นเมทริกซ์การหมุนขนาด 3x3
ชุดของการหมุนสมมูลที่รู้จักภายใต้ความสมมาตร สำหรับการประเมิน
ในกรณีของรูปร่างที่ทำเครื่องหมายไว้สามแบบ นี่เป็นเพียงการหมุนเวียนการแสดงผลเท่านั้น
เอกสารประกอบเพิ่มเติม : สำรวจเอกสารด้วยรหัส
หน้าแรก : https://implicit-pdf.github.io
ซอร์สโค้ด :
tfds.datasets.symmetric_solids.Builderรุ่น :
-
1.0.0(ค่าเริ่มต้น): การเปิดตัวครั้งแรก
-
ขนาดการดาวน์โหลด :
3.10 GiBขนาดชุดข้อมูล :
3.94 GiBแคชอัตโนมัติ ( เอกสารประกอบ ): ไม่
แยก :
| แยก | ตัวอย่าง |
|---|---|
'test' | 40,000 |
'train' | 360,000 |
- โครงสร้างคุณลักษณะ :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- เอกสารคุณสมบัติ :
| ลักษณะเฉพาะ | ระดับ | รูปร่าง | Dประเภท | คำอธิบาย |
|---|---|---|---|---|
| คุณสมบัติDict | ||||
| ภาพ | ภาพ | (224, 224, 3) | uint8 | |
| label_shape | ป้ายกำกับคลาส | int64 | ||
| การหมุน | เทนเซอร์ | (3, 3) | ลอย32 | |
| การหมุน_เทียบเท่า | เทนเซอร์ | (ไม่มี, 3, 3) | ลอย32 |
คีย์ภายใต้การดูแล (ดู
as_superviseddoc ):('image', 'rotation')รูป ( tfds.show_examples ):
- ตัวอย่าง ( tfds.as_dataframe ):
- การอ้างอิง :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}